驱动机构动态磁场干扰处理技术
2017-01-11代佳龙孟立飞刘超波
代佳龙,易 忠,曹 馨,孟立飞,肖 琦,王 斌,刘超波
(1.北京卫星环境工程研究所,北京 100094;2.中国科学院 地质与地球物理研究所,北京 100029)
驱动机构动态磁场干扰处理技术
代佳龙1,易 忠1,曹 馨2,孟立飞1,肖 琦1,王 斌1,刘超波1
(1.北京卫星环境工程研究所,北京 100094;2.中国科学院 地质与地球物理研究所,北京 100029)
空间磁场探测器在工作过程中会受到附近其他设备的磁干扰,影响磁场探测精度。文章通过对磁场探测器工作环境的干扰分析,并利用地面设备模拟磁干扰源进行评价试验。文章使用小波分析方法对磁场探测器的测量数据进行处理,评估驱动机构的电机工作时对磁场探测器的测量影响。磁场探测器通过多探头配置及在轨标定和数据处理等方法,可以对平台的静态剩磁及动态磁干扰进行有效处理。
磁场探测器;动态干扰;磁场;小波分析法
0 引言
空间磁场探测主要是通过在卫星上搭载磁强计实现。1958年5月,苏联发射了世界上首颗磁场探测卫星 Sputnik-3,开启了地球磁场和行星磁场探测的新阶段。1979年,美国地质调查局和NASA合作研制的“地磁卫星”(MagSat)首次实现了地磁三分量高精度测量。20年后,在国际地磁学与高层大气物理学协会(IAGA)发起的“国际重力位(重力、磁力)场10年研究”(IDGFR)计划下,欧洲主导掀起了新一轮的地磁场探测高峰,例如1999年2月丹麦发射了“奥斯特”(Orsted)卫星,2000年7月德国发射了CHAMP卫星等。目前,美国、俄罗斯、法国、德国、澳大利亚、日本、瑞典、南非、巴西和丹麦等国家都相继发射了载有磁场测量载荷的卫星,其中有一些是专用地磁探测的,一些是利用气象卫星搭载磁场测量载荷探测地球高层磁场。
为了保证磁场的精确测量,主要有两方面的技术措施:提高测量传感器的灵敏度和消除平台及其他设备带来的磁干扰。随着磁场探测技术的发展,磁测仪器性能不断提高,磁场探测器的灵敏度已经不再是阻碍磁场测量精度提高的主要因素,而消除平台和其他设备的磁干扰就成为关键[1]。为此要求对航天器进行严格的磁控制设计和制造,例如德国 CHAMP卫星本体及各个分系统和载荷通过严格的设计和制造以减小自身磁场[2]。除此之外,目前普遍采用的布置方式是将磁场探测器的探头布置于航天器桁架结构或外伸展机构上,并尽可能增加探头与航天器本体的距离。
本文采用双磁强计探头的梯度测量方法,通过地面磁干扰源模拟试验,评价该测量方法的可行性。
1 磁通门探测技术
磁通门磁强计的原理是基于法拉第电磁感应定律,利用高磁导率铁心在交变的过饱和电磁激励下选通铁心中DC磁场分量,并将DC磁场分量转换为交变电压输出值而进行磁场测量。三轴磁通门磁强计以其测量灵敏度高、体积小巧、重量轻、可进行矢量测量等特点已广泛应用于磁场的空间探测,并实现了科学探测目标[3-4]。本文所选用的空间磁场探测器是以三轴磁强计为主体,探测器探头由激励线圈、感应线圈、反馈线圈及支撑骨架和其他附件组成,如图1所示。通过由多组线圈组成的三轴同心嵌套式结构,实现磁场的高分辨率、宽量程测量。

图1 磁传感器探头构型Fig.1 Probe structure of fluxgate magnetometer
2 空间磁场探测干扰分析
空间探测到的磁场包括来自空间、星球的磁场源和来自航天器自身的磁场。为了在复杂背景磁场下获取目标磁场,空间磁场探测器的磁噪声控制技术及背景磁场与待测磁场分离技术成为关键。
磁场源按照时间演化速度和空间分布可视为以下两部分的叠加:1)近“干扰”源磁场,包括来自星球磁源和平台上的干扰源;2)远“干扰”源磁场,主要来自空间的磁场源。
可采用地面试验标定并建模、在轨标定及多探头相关分析等综合手段以有效地消除平台干扰。
磁场模型修正方法为
其中:Bamb为背景磁场;Bsc为平台干扰磁场;下标1、2、3分别代表不同的探头。探测到的磁场的每个分量均由背景磁场和平台设备的干扰磁场组成。
可以由下式计算任意 2个探头磁场强度三分量的差异(假设探头的零漂已知),即

其中Δ为一个特定的值。当计算结果大于Δ时,我们认为这是一个跳跃值,记录下次跳跃值。在地面标定阶段,假定背景场已知,记录特定工况下探头之间的畸变。最后制定包含所有状态的工况流程图。
在真实数据处理过程中,先计算任意2个探测头之间磁场强度的差异;然后查找磁场跳变,评估不同工况下的磁场差异,并与工况表之间的差异做对比,确定离工况表中最近的差异状态;重复此步骤,直到所有跳变均被修复,最终得到背景场。
3 试验过程
本试验结合空间磁场探测器的真实工作环境,以空间探测器车轮的驱动机构电机作为干扰源,评价电机工作时对磁场探测器产生的动态干扰[5-7]。
模拟部分主要包括电机及其控制装置,电机转速在0.1~2 r/s范围内可调。磁场测量的采样频率为100 Hz,探测器分辨率为0.1 nT。试验分别在电机关机及工作2种工况下进行,磁场探测器探头1和探头2距离电机分别为0.5 m和1 m,具体试验步骤如下:
1)测量环境磁场。在电机关闭状态下,将探测器探头如图2位置摆放好,1号、2号探测器开机并记录磁场数据,连续测量5 min。
2)测量电机工作时的干扰。保持探头位置不变,开启电机,1号、2号探测器开机并记录磁场数据,连续测量5 min。
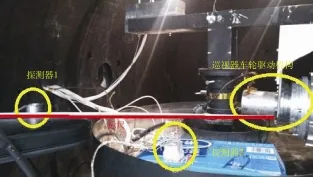
图2 模拟干扰试验布置Fig.2 Configuration of the interference simulation test
4 试验结果
1)电机关闭状态下的磁场测量
图3显示了电机关闭状态下连续测量3 min的磁场测量值随时间的变化情况,共计 18 000个测量数据点。其中:上图中红线为探头2(S2)磁场总强度加6544 nT后的值,黑线为探头1(S1)的测量值;中图及下图分别是探头2和探头1磁场测量值的小波功率谱图,以不同颜色代表不同时间、不同频率的磁场扰动功率。从图3可以看出,2个探头的测量值在电机关闭状态下保持固定的差值6544 nT。这说明磁干扰属于远距离干扰源磁场,对2个探头的影响保持一致。

图3 电机关机工况下磁场探测器测试结果Fig.3 Test results of the magnetic detector under motor shutdown state
2)电机开启状态下的磁场测量
电机开启状态下的磁场测量值随时间的变化见图4。图线格式与图3相同:上图中红线为探头2磁场总强度加6570 nT后的值,黑线为探头1的测量值;中图及下图分别是探头2和探头1磁场测量值的小波功率谱图,不同颜色代表不同时间、不同频率的磁场扰动功率。从图4可以看到:探头1(上图黑线)测量数据中磁场扰动振幅明显大于探头 2的;中图及下图的小波功率谱图上有以0.5 Hz为中心的红色横条带图案,说明磁场扰动存在0.5 Hz频率的周期性。该周期扰动在2个探头位置的振幅分别为20 nT和5 nT,表明扰动对探头1影响更明显,扰动的影响与距扰动源的距离相关。据此可以判断,该电机的旋转周期约为2 s。该旋转周期得到了现场电机试验参数的验证。

图4 电机开机工况下磁场探测器测试结果Fig.4 Test results of the magnetic detector under motor run state
5 数据处理结果
采用本文所述的磁场梯度测量方法对试验数据进行分析处理,绘制小波功率谱图,如图5所示。
根据2个探头测量的磁场值的相关分析,可以有效地消除电机对测量的磁干扰。根据单电流源毕奥-萨伐尔定律,在低频近似下,不同频率的电流磁场对应成比例。因此,通过小波分解得到不同频率上的时间变化强度比值,可以识别出干扰源对2个探头在某个频率上的比值。对于试验数据来说,就是在图4中的0.5 Hz处的波动值。根据比值及差值可以消去这个频率上的干扰。除此频率干扰外,还有直流分量的静态叠加场。可以通过2个探头的相关分析得到探头 1的去除静态干扰的磁场值。图5显示了2个探头的数据经过在线标定后的分析结果,其图线格式与图3相同。
从图5可以看到,探头1测量值(上栏黑线)不再有0.5 Hz频率的约20 nT振幅的扰动现象,探头1和探头2的数据趋于一致。
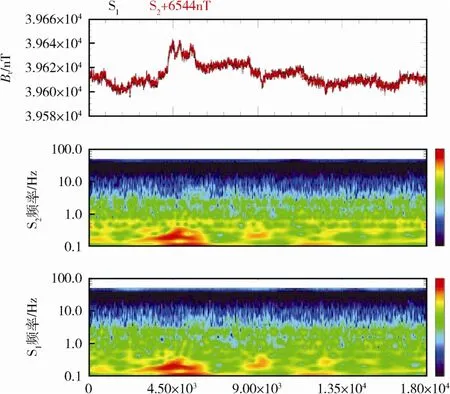
图5 采用小波分析法处理后的试验数据Fig.5 Processed results by the wavelet analysis method
通过以上分析可以得出,根据麦克斯韦方程,本方法适用于低频电流源及直流源的干扰;对于高频的干扰,会有电场项引入,该影响可以根据2个探头间距和电磁扰动的特征波长的关系来确定,即探头间距远小于扰动波长。
6 结论
本文使用小波分析方法对磁场探测器的测量数据进行处理,评估驱动机构运动时真空电机对磁场探测器的测量干扰。经上述试验结果分析,可以得出以下结论:
1)空间磁场探测利用多探头配置及在轨标定和数据处理方法,有效去除了平台的静态剩磁及动态磁干扰;
2)磁场探测器可以清晰地检测到电机的工作状态,包括电机转动周期等工作参数信息;
3)本次试验空间磁场探测器放置在用于支撑电机的钢板上,表明该载荷可以适应复杂的安装环境,包括无规律铁磁材料部件分布环境。
本文提出的使用磁场探测器处理空间干扰磁场的技术既可以对平台的静态剩磁及动态磁干扰进行有效处理,为科学目标的实现奠定基础,也为磁场反演载荷工作状况提供了新的思路。
(
)
[1]YIN F, HERMANN L.Recalibration of the CHAMP satellite magnetic field measurements[J].Measurement Science and Technology, 2011, 22: 055101.Doi: 10.1088/0957-0233/22/5/055101
[2]LV J W, YU Z T, HUANG J L, et al.The compensation method of vehicle magnetic interference for the magnetic gradiometer[J].Advances in Mathematical Physics, 2013(2): 1185-1216
[3]PRIMDAHL F.The fluxgate magnetometer[J].Journal of Physics E: Scientific Instruments, 2001,12(4): 241-253
[4]MERAYO J M G, BRAUER P, PRIMDAHL F, et al.Scalar calibration of vector magnetometers[J].Measurement Science & Technology, 2000, 11(2): 120-132
[5]齐燕文.空间磁环境模拟技术[J].航天器环境工程, 2005, 22(1): 19-23 QI Y W.Space magnetic environment simulation technology[J].Spacecraft Environment Engineering, 2005, 22(1): 19-23
[6]刘超波, 易忠, 肖琦.动态环路法磁矩测量技术研究[J].航天器环境工程, 2012, 29(1): 55-60 LIU C B, YI Z, XIAO Q.Dynamic loop method for measuring the magnetic moment[J]. Spacecraft Environment Engineering, 2012, 29(1): 55-60
[7]刘超波, 王斌, 陈金刚, 等.磁场全张量测量计算方法与误差分析[J].航天器环境工程, 2015, 32(1): 63-66 LIU C B, WANG B, CHEN J G, et al.Measurement and calculation of magnetic field full tensor with error analysis[J].Spacecraft Environment Engineering, 2015, 32(1): 63-66
(编辑:许京媛)
A dynamic magnetic interference processing technology for drive mechanism
DAI Jialong1, YI Zhong1, CAO Xin2, MENG Lifei1, XIAO Qi1, WANG Bin1, LIU Chaobo1
(1.Beijing Institute of Spacecraft Environment Engineering, Beijing 100094, China; 2.Institute of Geology and Geophysics, Chinese Academy of Sciences, Beijing 100029, China)
The efficiency of a spaceborne magnetometer is affected by various kinds of interference on the satellite platform.A high-precision detector for the space magnetic field detection is used to evaluate the magnetic disturbance, produced by some drive mechanisms of ground simulated devices in a complex background environment.Magnetic field measurement data are processed by using the wavelet analysis method.With a multi-probe configuration, the calibration on orbit and the data processing method, the space magnetic field detector can effectively remove the static remanence of the platform and the dynamic magnetic disturbance.
magnetometer; dynamic interference; magnetic field; wavelet analysis method
O441.5
:A
:1673-1379(2016)06-0676-04
10.3969/j.issn.1673-1379.2016.06.019
代佳龙(1984—),男,硕士学位,主要从事磁场探测载荷研制与海洋磁场分析工作。E-mail: daijialong@163.com。
2016-07-26;
:2016-12-13
国家重大科技专项工程