体外仿生大鼠胃的功能性材料的实用性研究
2016-12-21陈利丁黄静帅董国文陈晓东
陈利丁,黄静帅,董国文,陈晓东
(1.苏州大学材化部化学工程与环境工程学院,江苏苏州215123;2.三明学院资源与化工学院,福建三明365004)
体外仿生大鼠胃的功能性材料的实用性研究
陈利丁1,黄静帅1,董国文2,陈晓东1
(1.苏州大学材化部化学工程与环境工程学院,江苏苏州215123;2.三明学院资源与化工学院,福建三明365004)
优选适合制备体外仿生大鼠胃柔性模型的功能性硅胶材料。采用四种不同硬度的功能性硅胶材料制作成三种厚度的硅胶片,并制作了相应的大鼠胃柔性模型,利用色差仪、质构仪、拉压力试验机以及灌胃实验对样品的透明度、延展性和拉伸特性进行表征。结果表明:在相同硬度下,硅胶片的透明度和延展性随着其厚度的增加而递减;而在相同厚度下,不同硬度硅胶片的透明度差异不大,但其最大拉伸形变量和延展性随硬度增大而减小。其中,硬度为10A的功能性硅胶Dragon Skin的半透明程度最高、延展性最好、抗撕扯、易回弹,且具有一定的容受性舒张的功能,因此适用于制作成体外仿生大鼠胃柔性模型。模型的前胃部分厚度定为0.32 M M,腺胃部分厚度定为0.46 M M。
体外仿生大鼠胃;形态仿生;功能性硅胶;容受性舒张;回弹性
大鼠具有易饲养、繁殖快和对营养缺乏敏感等特点,是生物、医学、食品等研究领域中最常用的实验动物之一[1]。然而由于动物个体差异大,导致样本需求量多、花费多、工作量大等不可弥补的缺点,并且还有伦理方面的限制[2]。柔性体外仿生消化道是利用硅胶或乳胶等柔弹性材料制作出的消化器官模型[3]。通过在柔性体外仿生消化道上施加水力或机械作用力,达到模仿真实消化道的蠕动过程的目的,使之更真实地模拟消化过程。采用体外仿生消化可以对真实消化过程进行模拟,在“前测试”中预测动物实验的结果和优化实验条件,部分替代甚至完全替代动物实验,在消除伦理道德问题的同时降低了时间和经济成本,并提高了实验的准确性和重复性。因此,发展一套可靠的大鼠消化道体外仿生系统已迫在眉睫。
目前国内外已研发出的柔性体外仿生胃系统例如TIM-1、HGS和GDS都忽略了胃的真实形态对体外消化过程的影响[4-6]。然而,不管是胃的解剖结构还是生理功能,不同哺乳类动物的胃都相差甚远[7];此外,Chen等通过具有人胃形态的RD-IV-HSM系统发现胃的固有形态显著影响了食糜的排空顺序[8],因此体外仿生胃应当具备所模仿的动物胃的固有形态。大鼠胃是单室胃,分为前胃和腺胃两部分(如图1所示),这两个部分由一圈被称为“界限嵴”的皮区折叠隔开。前胃的胃壁薄、肌肉结构弱并且不含分泌腺;而另一侧腺胃的胃壁上则富有血管、肌肉,并覆盖着丝绒状胃腺,内壁粘膜呈纵行褶皱状[1]。前胃的一个最重要的生理功能就是储存食物,它能在3小时甚至更长的时间内储存食料[9],因此前胃的延展性远大于腺胃:在空腹状态下,大鼠的前胃部分小于腺胃部分;但在饱腹状态下,前胃的体积可延展到整个胃部的三分之二,该功能也被称为前胃的容受性舒张特性[10]。腺胃是大鼠胃进行消化的主要部分:胃壁的环状收缩从界限脊开始逐渐向幽门蠕动[11],使胃窦内的食物被研磨破碎,并与由腺胃内壁分泌的胃液进行混合,而胃液对食物的软化和侵蚀进一步消化食物[12]。由于目前尚未有人对制作胃的柔性材料是否能重现胃的真实生理功能进行研究,因此本研究选用4种不同硬度(10、20、30、40 A)的硅胶制作硅胶片,对其透明度、延展性、弹性、拉伸强度和断裂点应力进行比较;进而选择合适的功能性硅胶材料来制作体外仿生大鼠胃柔性模型,以期实现真实大鼠胃的前胃容受性舒张和腺胃收缩弹性高的功能。
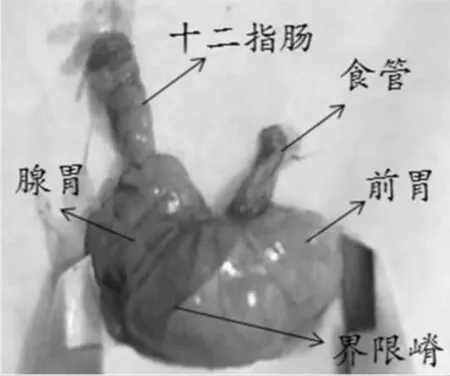
图1大鼠胃的解剖结构[1]
1材料与方法
1.1材料
本实验选用四种半透明的功能性硅胶材料,其硬度以邵氏硬度表示,分别为10 A(1∶1,Dragon Skin,罗氏贸易有限公司,澳大利亚)、20和30A(50∶1,东莞汇洲高分子材料有限公司)、40 A(10∶1,深圳市亿品艺品模型材料有限公司)。大米(丝苗米,福临门,中粮集团有限公司),食用色素(女皇胭脂红,澳大利亚)。
1.2仪器
色差仪(CR-400,柯尼卡美能达,日本)、质构仪(CT-3,博勒飞,美国)、电脑式拉压力试验机(KJ-1065,科建仪器有限公司)、照相机(550D,佳能,日本)、单通道注射泵(SPLab01,保定申辰泵业有限公司)。
1.3实验方法
1.3.1不同厚度硅胶片的制作与性能分析
分别配置5、10和20 mL硅胶生胶,抽去气泡后平铺在光滑的四氟板上,105℃加热2 h,接着对其厚度、透明度、延展性和拉伸性能进行检测。每个厚度制作一定数量的硅胶片,提供30个检测部位,结果显示为平均值±标准偏差。硅胶片的厚度和透明度分别用游标卡尺和色差仪进行检测。硅胶片的延展性用Φ25.4M M的尼龙圆球探头做质构仪压缩模式检测,硅胶片用TA-DE延展性夹具固定在TA-BT-KIT夹具基台上,球形探头的压缩速度设为0.5M M/s、压缩距离20M M。硅胶片的拉伸性能由拉压力试验机进行检测,硅胶片待测样品用试样5 A模具压割成条状,拉伸速率设为50 M M/min。
1.3.2体外仿生大鼠胃柔性模型的制作
解剖饱腹大鼠,获得大鼠胃,洗净,灌入塑料使之膨大至饱腹状态下的平均大小(图2(a))[11]。翻模,制作出大鼠胃的树脂模具(图2(b))。接着将抽除气泡的硅胶生胶灌入模具中,加热固化形成半透明的体外仿生大鼠胃柔性模型。其中,前胃部分内壁光滑(图2(c))、腺胃部分内壁充满褶皱(图2 (d))。柔性鼠胃模型的尺寸为38 M M×24 M M×15 M M(±1 M M),容积约为7.5 mL。
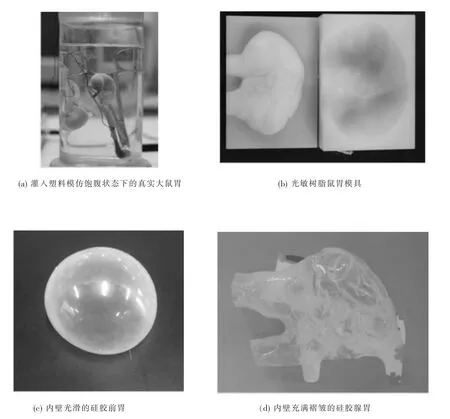
图2体外仿生大鼠胃柔性模型
1.3.3前胃的延展性
大米与水1∶4混合,加入数滴食用色素染色,置于隔水炖盅中沸水烹煮30 min。接着将煮熟的米饭置于食品加工机中打碎(米糊粒径563±469μm)。一次性注射器抽取染色米糊后固定在单通道注射泵上,针头端连接一根硅橡胶软管接入体外仿生大鼠胃的进食管中,体外仿生大鼠十二指肠接通大气压。启动注射泵,并拍摄灌注过程中体外仿生大鼠胃形态的变化,直至米糊灌满整只鼠胃并且倒灌入十二指肠。使用Image J软件处理拍摄的图片,前胃的延展性以灌注前后的前胃的阴影像素面积的增量来表示。米糊的灌注速度设为1.0 mL/min
1.3.4腺胃的回弹性
腺胃的回弹性用Φ20 M M的金属圆柱探头做质构仪压缩模式检测。将体外仿生大鼠胃置于TA-BT-KIT夹具基台上,且柱形探头正对腺胃部分,启动力0.8 g,探头的压缩速度1.0 M M/s、压缩距离2.6 M M(真实鼠胃壁面收缩距离)、探头收回速度10 M M/s。录像,分析被挤压的腺胃在压力消失后的回弹性能。
2结果与分析
2.1硅胶片的透明度
常见的柔性功能性材料如橡胶、乳胶和硅胶,与其他柔性功能性材料相比,硅胶质地柔软、回弹力好、牢固、抗撕扯、不溶于水、不和酸碱起反应、无粘性、耐高温、可消毒,且具备一定的透明度,因此适用于制作体外仿生大鼠胃的模型。真实大鼠的前胃具有胃壁极薄且半透明的生理特征,因此制作体外仿生大鼠胃的前胃的功能材料在尽量薄的基础上能够具有很好的透明度,以便观察胃内的食糜变化情况。在本研究中,5、10和20 mL硅胶生胶所制得的硅胶片对应的厚度分别为0.322±0.003、0.463±0.019和0.918± 0.024 M M。硅胶的硬度差异所造成的组间差异均小于3%,即硅胶的硬度对所制备的硅胶片厚度的影响不大。硅胶片的透明度由硅胶片与白纸之间的明度差值ΔL表示,如图3所示,对同种硬度的硅胶,厚度愈大,硅胶片的透明度愈小(p<0.001);但对于同种厚度的硅胶片,硅胶的硬度对其透明度影响不大。因此,从透明度角度来考察,体外仿生大鼠胃的前胃厚度可以设定为0.32 M M,以获得较好的观察视野。
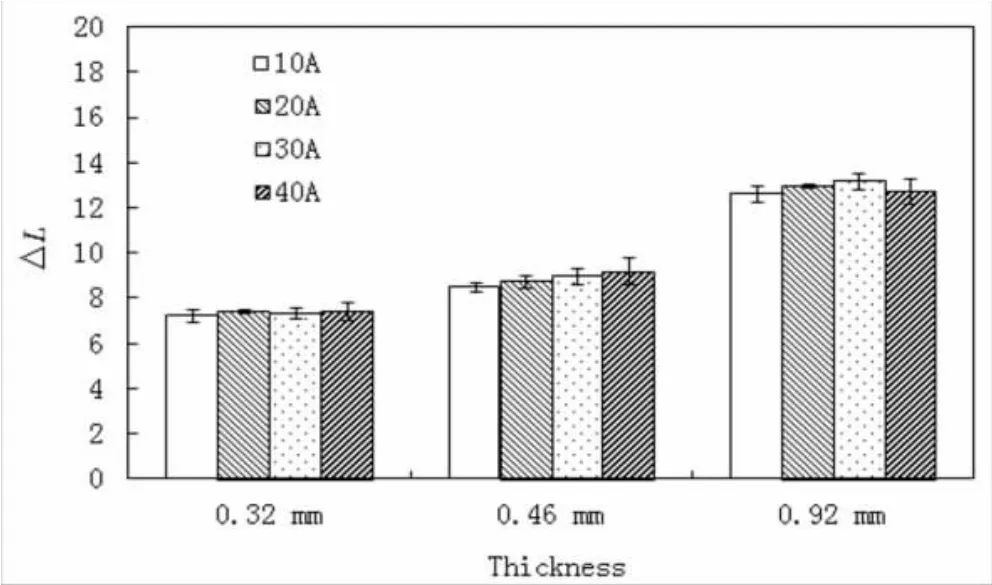
图3 4种硬度3种厚度硅胶片的透明度
2.2前胃的延展性
真实大鼠的前胃具有特有的容受性舒张的生理特征,因此制作体外仿生大鼠胃的前胃的功能材料应有较好的延展性。本研究采用不同硬度的硅胶制作成厚度为0.32 M M体外仿生大鼠前胃。由图4可知,功能性硅胶前胃的厚度与硅胶片保持了近似的误差(p>0.05),即前胃的物理特性可用近似厚度的同种材料制备的硅胶片的物理特性来表征。

图4 4种硬度硅胶前胃与硅胶片的厚度
如表1所示,对同种硬度的硅胶片,厚度对最大拉伸形变量的影响并无显著规律;但硬度为10 A的硅胶片的最大拉伸形变量远大于其他硬度的硅胶片,其中硅胶片厚度为0.32 M M时硅胶片的最大拉伸形变量最大,达到915%。如图5所示,对于同一种硬度的硅胶片,球形探头对硅胶片要达到相同的形变量,愈薄的硅胶片所需应力愈小,即硅胶片的延展性愈大;而对于同种厚度的硅胶片,硅胶的硬度愈小,硅胶片的延展性愈大。因此,从硅胶片的拉伸特性和延展性角度考虑,硬度为10 A的硅胶可能较为适合用来制作前胃,并且前胃的厚度可设定为0.32 M M。

表1 4种硬度硅胶片的拉伸特性

图5球形探头对3种厚度的硅胶片的延展性
分别用4种硬度的功能性硅胶制作体外仿生大鼠胃的前胃部分,厚度设定为0.32 M M,内壁光滑、透明度好(如图2(c)所示)。前胃在灌胃前后的阴影像素面积的变化如表2所示:功能性硅胶的硬度愈小,前胃的延展性愈好,其中,硬度为10 A的前胃延展性最佳,注满米糊后其阴影面积扩大了近1/3,即该硅胶材料在一定程度上能重现前胃的容受性舒张的功能。综上所述,硬度为10 A的功能性硅胶较为适用于制作体外仿生大鼠胃的前胃部分,且前胃部分的厚度应设为最薄厚度的0.32 M M。

表2 4种硬度硅胶前胃在灌注前后的阴影像素面积
2.3腺胃的弹性
大鼠腺胃富有的肌肉组织在胃壁上产生收缩性蠕动,促进食物研磨和消化,所以制作腺胃部分的功能材料需要有较强的抗撕扯性能和回弹性。由表1可知,4种硅胶材料的拉伸强度(拉伸断裂点应力)均大于2.0 MPa,即四种硅胶材料都能满足抗撕扯的需要。此外,在四种硬度下,0.46 M M厚度的硅胶片的拉伸强度均为该硬度最大,因此腺胃的厚度可选为0.46 M M。图6所演示的是硬度为10A的腺胃的回弹特性:15 s时腺胃被探头显著压缩至最低处,16 s时的图片显示腺胃在1 s内弹回原型。另外3种硬度的腺胃都显示出相似的回弹特性,即四种硬度的功能性硅胶材料都能满足制作体外仿生大鼠腺胃柔性模型的需要。由于同种硅胶材料容易实现一体化粘合,因此制作腺胃的功能性材料也选用硬度为10 A的硅胶。
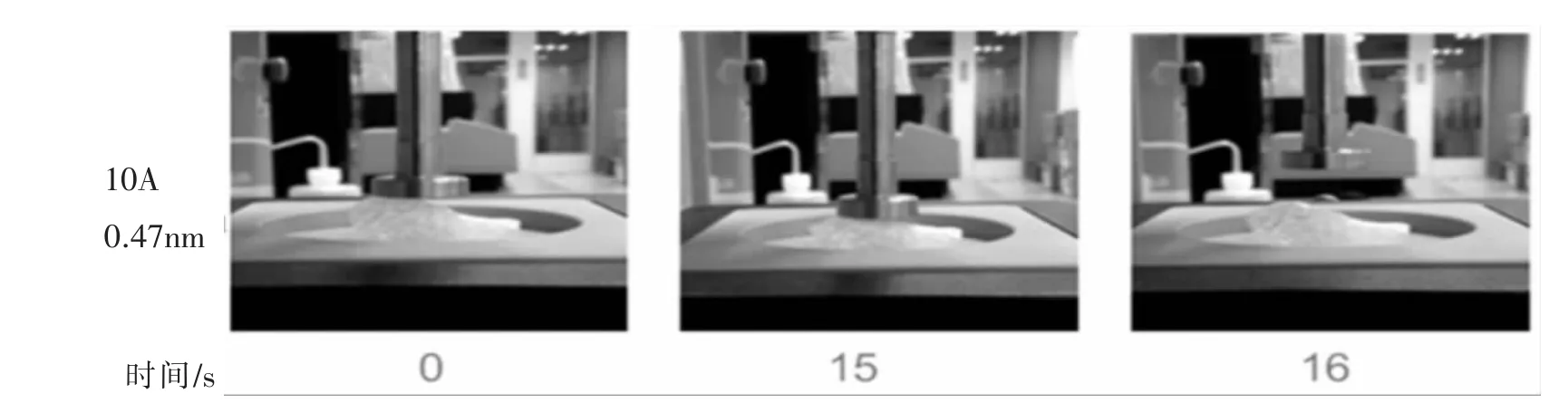
图6厚度为0.47 M M的硅胶腺胃的回弹响应时间
3小结与讨论
本研究中,在相同硬度下,硅胶片的透明度和延展性随着其厚度的增加而递减;而在相同厚度下,不同硬度硅胶片的透明度差异不大,但其最大拉伸形变量和延展性随硬度增大而减小。其中,硬度为10 A、厚度为0.32 M M的功能性硅胶Dragon Skin的延展性最好、透明程度最高,制作成的体外仿生大鼠前胃在灌胃后能增大约1/3的阴影面积。4种硬度的功能性硅胶所具有的抗撕扯和易回弹特性均符合制作体外仿生大鼠腺胃的需要,其中0.46 M M厚度的腺胃表现最佳。因此,为了实现大的柔性、弹性范围、同时维持一定的透明度,制作体外仿生大鼠胃的功能性硅胶材料可暂定为硬度为10 A的Dragon Skin,并且前胃的厚度定为0.32 M M,腺胃厚度定为0.46 M M。虽然新的体外仿生大鼠胃柔性模型在一定程度上模仿了真实大鼠前胃的容受性舒张功能,但与真实情况仍有一定差距[10]。未来的研究方向是继续寻找延展性更好的功能性硅胶材料,以及探究通过预折叠来获得前胃较大的延展性的可能性。
[1]孙以方.医学实验动物学[M].兰州:兰州大学出版社,2005.
[2]YOO J,CHEN X.GIT Physio-cheMicalmodelling-critical review[M].Auckland:Engineers Australia,2006.
[3]HUR S J,LIMB O,DECKER E A,et al.In vitro human digestion models for food applications[J].Food CheMistry,2011,125:1-12.
[4]VERWEIM,MINEKUSM,ZEIJDNER E,et al.Evaluation of two dynaMic in vitro models simulating fasted and fed state conditions in the upper gastrointestinal tract(TIM-1 and tiny-TIM)for investigating the bioaccessibility of pharmaceutical compounds froMoral dosage forms[J].International J ournal of P harmaceutic,2016,498:178-186.
[5]GUO Q,YE A,LAD M,et al.Disintegration kinetics of food gels during gastric digestion and its role on gastric emptying:an in vitro analysis[J].Food&Function,2015(6):756-764.
[6]KOZU H,NAKATA Y,NAKAJIMA M,et al.Development of a h uman g astric d igestion s imulator e quipped with p eristalsis f unction for the d irect o bservation and a nalysis of the f ood d igestion p rocess[J].Food Science and Technology Research,2014(20):225-233.
[7]DESESSO J,JACOBSON C.AnatoMical and physiological parameters affecting gastrointestinal absorption in humans and rats[J].Food and CheMical Toxicology,2001,39:209-228.
[8]CHEN L,XU Y,FAN T,et al.Gastric emptying and morphology of a'near real'in vitro human stomach model (RD-IV-HSM)[J].Journal of Food Engineering,2016,183:1-8.
[9]GàRTNER K.The forestomach of rats and Mice,an effective device supporting digestivemetabolisMin muridae(review)[J].Journal of Experimental Animal Science,2002,42:1-20.
[10]LENTLE R G,JANSSEN PW,GOH K,et al.Quantification of the effectsof the volume and viscosity of gastric contentson antraland fundic activity in the ratstomachmaintained ex vivo[J].Digestive D iseasesand S ciences,2010,55:3349-3360.
[11]CHEN L,WU X,CHEN X D.Comparison between thedigestive behaviorsof a new in vitro rat soft stomach modelwith thatof the in vivo experimentation on living rats–motility and morphologicalinfluences[J].Journalof Food Engineering,2013,117:183-192.
[12]KONG F,OZTOPMH,SINGH R P,et al.Physical changes in white and brown rice during simulated gastric digestion[J].Journal of F ood S cience,2011,76:450-457.
(责任编辑:朱联九)
Practicability Study of the Functional Silicone Materials Used for Building the in vitro Rat Stomach
CHEN Li-ding1,HUANG Jing-shuai1,DONG Guo-wen2,CHEN Xiao-dong1
(1.School of Chemical and Environmental Engineering,College of Chemistry,Chemical Engineering and Materials Science, Soochow University,Suzhou 215123,China;2.College of Resource and Chemical Engineering,Sanming University,Sanming 365004,China)
Siliconematerialswith four kinds of hardnesseswere studied in thiswork.They were used to make sheets and in vitro rat stomach with three kinds of thicknesses.Their transparency,ductility and tensile propertieswere evaluated. The ductility of the sheetswas reduced as the thickness and hardnesswas increased.The silicone named Dragon Skin(10A), which has the best field of view,high tear strength,good elasticity and some receptive relaxation,could apply to themaking of the in vitro rat stomach.As the transparency was influenced much by the thickness,affected little by hardness,the thickness of the forestomach and the glandular stomach could be setas 0.32 and 0.46M M.
in vitro ratstomach;morphology simulation;functional silicone;receptive relaxation;elasticity
TB32
A
1673-4343(2016)06-0057-07
10.14098/j.cn35-1288/z.2016.06.010
2016-08-08
江苏省博士后科研资助计划项目(1501093B);福建省科技厅重点项目(2014Y0072);江苏高校优势学科建设工程项目
陈利丁,女,福建福州人,讲师,博士。主要研究方向:消化道的体外仿生系统研究。
