一种霍尔式旋转机械角加速度测量系统的研究与应用
2016-12-20黄孝平
黄孝平
(南宁学院,南宁 530200)
一种霍尔式旋转机械角加速度测量系统的研究与应用
黄孝平
(南宁学院,南宁 530200)
旋转机械的角加速度是反映其运行状态的重要参数,因此设计了一种基于霍尔效应的新型角加速度测量系统。系统包括霍尔式传感器和数字信号处理器,通过安装在旋转机械转轴上的磁钢和霍尔传感器获取转速信号,对转速信号进行滤波和整形处理,再对转速信号进行数字微分,最终得到旋转机械的角加速度值。构建了旋转角加速度测量系统的框架,对部分模块和系统进了仿真,验证了设计的正确性。最后对步进电动机进行了角加速度测试实验,结果表明该角加速度测量系统具有较强的实用性。
角加速度;FPGA;霍尔传感器;步进电机
0 引 言
角加速度是旋转机械设备的一项重要参数,通过对该参数的测量,可以实现旋转机械运行状态的动态监测、实时控制和故障识别,且旋转系统的外界各种动态干扰,会以角加速度的形式表现出来[1]。因此,角加速度测量广泛应用于汽车、航空、军事等多个领域。近年来,一些学者和专家对角加速度的测量进行了一系列的研究,包括一种基于电磁感应原理的永磁式角加速度传感器[2]和一种电磁式角加速度传感器[3],这两种角加速度传感器的优点在于能够测量瞬时角加速度值;一种结构轻巧的力平衡扭摆式硅MEMS角加速度传感器[4];一种微流体惯性质量角加速度计[5];一种基于LabVIEW的转轴角加速度测试仪[6];一种光栅角加速度测量装置[7]和一种新的基于卡尔曼滤波及牛顿预测的角加速度估计方法[8]。
本文设计了一种高精度数字式角加速度测量系统,采用霍尔传感器和安装子旋转机械转轴上的磁钢齿获取转速信号,转速信号经过滤波和整形以后,利用FPGA对其进行数字微分,最终得到旋转设备的角加速度值。推导了角加速度的理论公式,采用软件对角加速度测量原理进了了仿真,并对测量误差的来源进行了分析。最后对实际的旋转设备进行了角加速度测试实验,结果表明该角加速度测量装置具有较强的实用性,且在理论上可以达到较高的测量精度。
1 角加速度测量原理
1.1 霍尔转速传感器
霍尔转速传感器是一种利用霍尔效应获取转速信号的装置,如图1所示,包括支架、磁钢片和霍尔传感器。支架与被测旋转设备的转轴相连,支架的外侧均匀分布磁钢片若干个,磁钢片的磁极厚度相同,且在支架的圆周外侧呈N,S极交替排列。
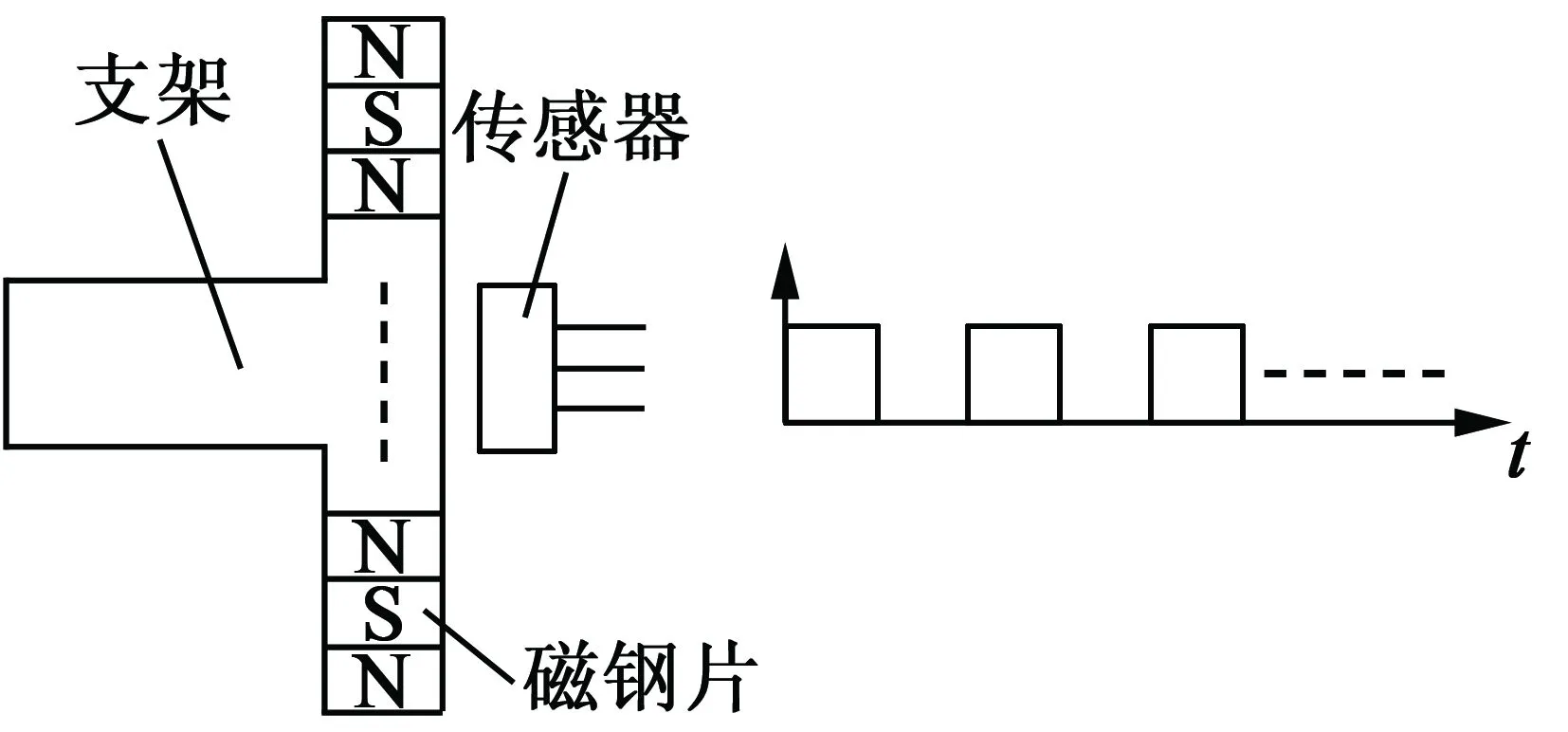
图1 霍尔转速测量示意图
当旋转设备运行时,带动磁钢片同时旋转,霍尔传感器通入恒定电流,根据霍尔效应,理想状态下,霍尔传感器的输出端产生如图所示的方波电信号。
1.2 滤波整形
由于霍尔传感器是磁敏类传感器,容易受到外界磁场的干扰,比如电动机中的定子磁场,进而形成高频噪声信号,对实际的转速信号造成干扰,可以采用滤波电容进行去噪处理。
整形电路的目的是为了将霍尔传感器的输出模拟电信号转换成数字逻辑信号,以实现后续的数字微分处理。本文采用电压比较器LM339实现所要求的功能,该芯片工作时,一个比较输入端接地作为基准电压,另一端加一个待比较的信号电压,当两个输入端电压差别大于10 mV时,即可实现数字逻辑信号的可靠翻转。
1.3 数字微分
角加速度信号是角速度信号的一次微分,可以通过检测两个相邻时间段的角速度值和时间间隔,进行微分处理后即可获取角加速度值。
设磁钢片的个数为x,由于磁极厚度均匀,则每个磁极在空间上的角度为2π/x弧度。采用高频脉冲对霍尔传感器输出的信号进行与逻辑,高频脉冲的频率为f,相邻两个磁极对应的角度内脉冲个数分别为y和z,如图2所示。
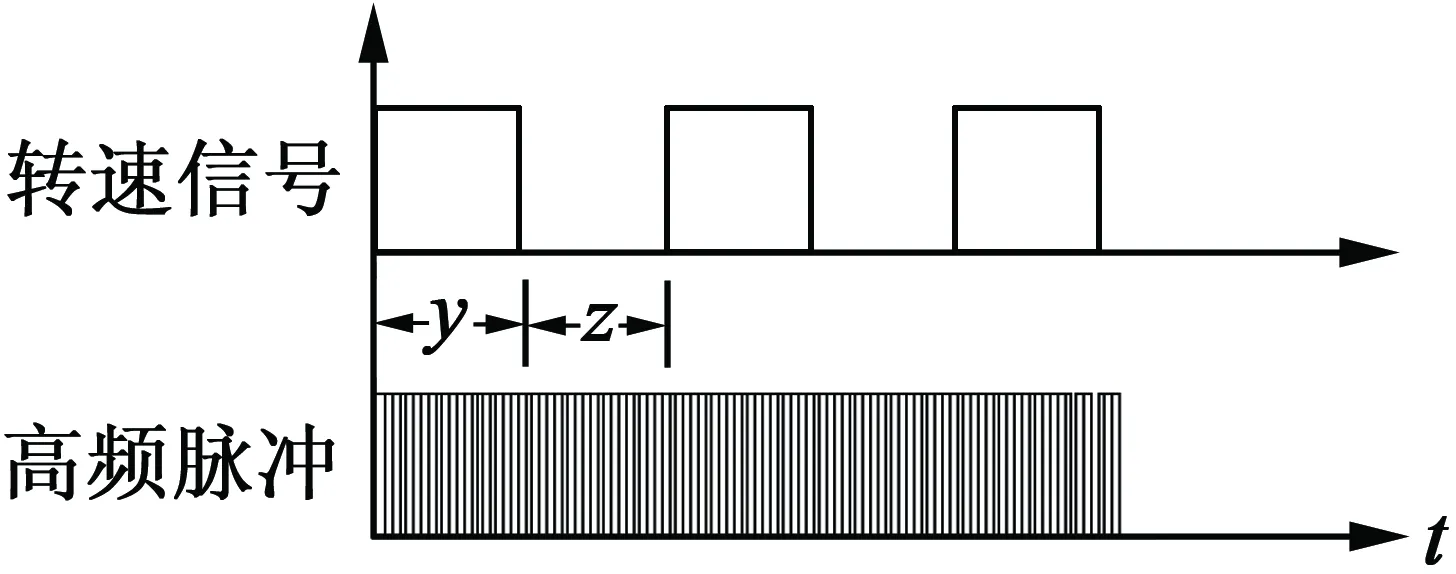
图2 数字微分原理
(1)
由于数字处理器产生的高频插值脉冲频率f,以及支架一的磁极数x为已知量,因此,根据式(1)只要通过一定的测量方法,获取到相邻两个磁极对应的角度内的脉冲数y和z,就能得到角加速度值β。
2 测量系统的整体实现
2.1 系统总体结构框架
根据角加速度的测量原理可知,为得到相邻两个磁极对应的角度内的高频脉冲数y和z,系统总体电路结构如图3所示。
图3中H为霍尔传感器输出的转速信号,经过非逻辑门后产生信号K;HP为高频脉冲信号,由有源晶振通过FPGA内部的倍频器倍频后产生;开关控制器的作用是为了设置对高频脉冲进行计数的开始节点和结束节点,其产生的信号Start为开始计数信号,End为计数结束信号;开关控制器1的Start,End和信号H,HP进行与逻辑,得到信号S2,再通过计数器1进行计数,计数结果为y;开关控制器2的Start,End和信号K,HP进行与逻辑,得到信号S2,再通过计数器2进行计数,计数结果为z;计数器1,2的结果传送至数据处理器,数据处理器按照式(1)进行数据处理,最终得到所要测量的角加速度值。

图3 系统总体结构图
2.2 倍频器
由系统的测量原理可知,高频脉冲的频率 越高,系统的测量精度越高。倍频器实质上就是能够完成输入信号频率倍增作用的电子设备,经过倍频处理后,调频信号的频率可以成倍提高。FPGA内部的倍频器可以通过设置PLL来产生,如图4所示,inclk0为输入信号,ration为倍频系数,c0为输出信号,设置ration为8/1,则仿真结果如图所示,clock为输入信号,输出信号ll的频率为clock的8倍,即实现了8倍频的功能。
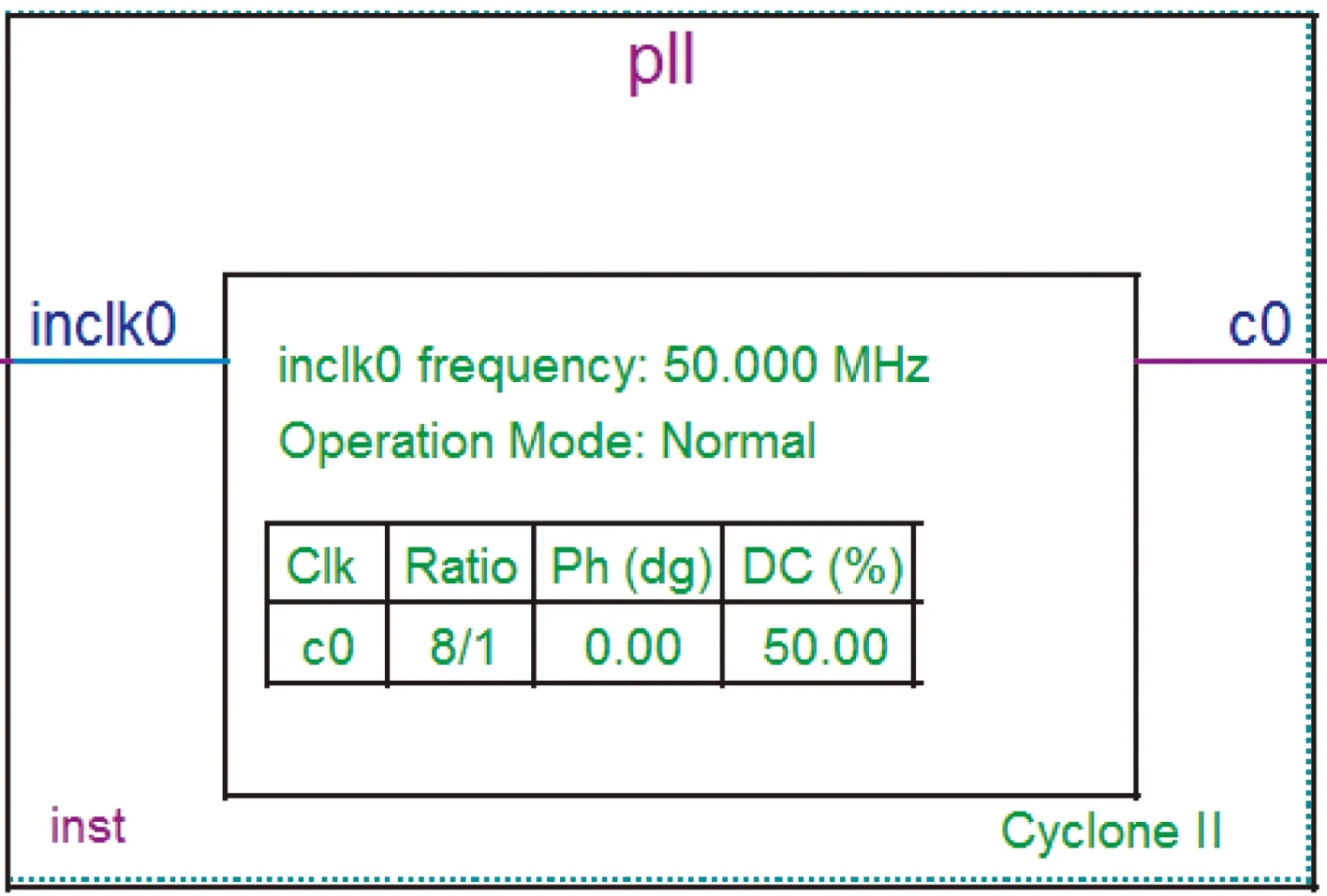

图4 倍频器及其仿真结果
2.3 开关控制器
开关控制器的功能是为了保证计数值y和z的正确性。系统开始工作时,开关控制器首先初始化,输出信号Start为逻辑低电平,End为逻辑高电平,此时图3中的与逻辑门1和与逻辑门2都是关闭的状态,计数器1和计数器2的计数结果都为零;当输入信号H第一个上升沿到来的时候,开关控制器1的输出信号Start翻转为逻辑高电平,计数器1开始计数,当输入信号K第一个上升沿到来的时候,开关控制器2的输出信号Start翻转为逻辑高电平,计数器2开始计数;为了确保计数结果的正确性,当输入信号H第二个上升沿到来的时候,开关控制器1的输出信号End翻转为逻辑低电平,计数器1结束计数,当输入信号K第而个上升沿到来的时候,开关控制器2的输出信号End翻转为逻辑低电平,计数器2结束计数。
设计的开关控制器由VHDL语言编写生成,根据该程序系统可以封装生成开关控制器模块,仿真结果如图5所示,其中reset为开关控制器初始化信号,高电平有效,低电平时开关控制器开始工作;data为输入信号,当data第一个上升沿到来时,start由低电平翻转成高电平;当data第二个上升沿到来时,end由高电平翻转成低电平,因此,通过仿真结果可知,设计的开关控制器能够实现测量系统所要求的功能。
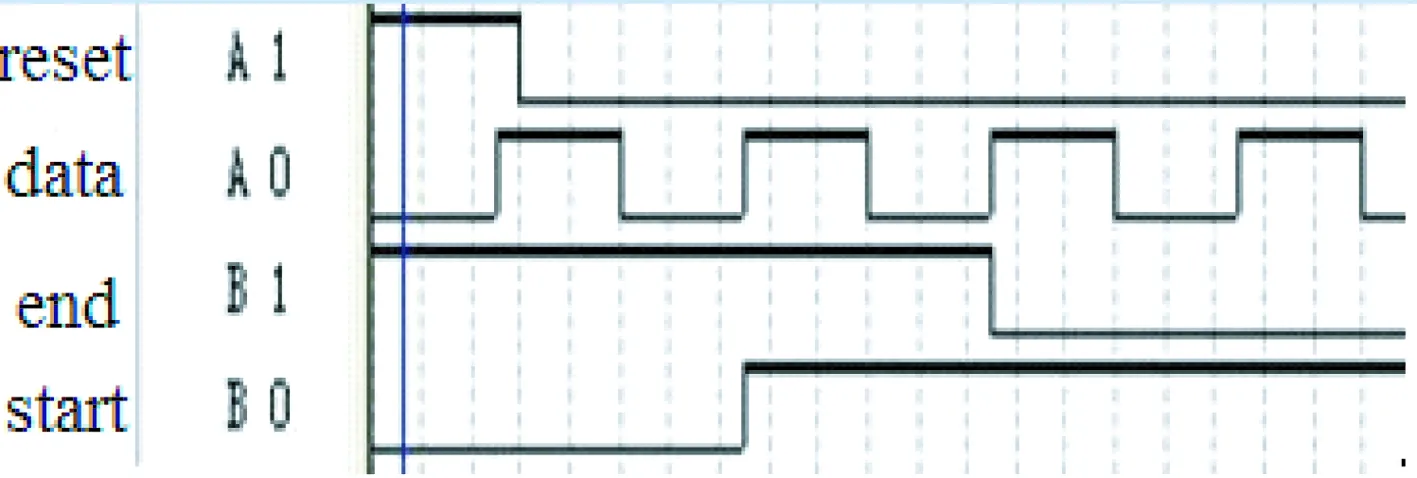
图5 开关控制器仿真结果
2.4 系统总体仿真
对如图3所示的结构框图构建系统电路,编译通过后进行仿真,结果如图6所示,图6中的信号与图3中的信号一一对应,由仿真结果可知,设计的测量系统能够实现要求的各项功能。

图6 测量系统总体仿真结果
3 实验结果
为了验证设计的角加速度测量系统的可行性,搭建了实际的旋转机械角加速度测量实验平台。其中数字处理器采用Altera公司生产的FPGA,选用的芯片型号为EP2C8Q208;外部晶振频率为50 MHz,倍频后高频脉冲为400 MHz。
实验一:转速信号由高精度信号发生器进行模拟,产生的方波信号约为500 Hz,占空比为50%,即此时模拟的旋转设备角加速度理论值为0,将该信号输入到角加速度测量系统中,假设磁极数x为40,得到的实验结果如表1所示。

表1 实验一数据
由实验一的结果可知,计数结果y和z存在一定的误差,来源包括:信号源误差,即信号发生器产生的方波信号发生了微小的改变;FPGA内部计数器1和计数器2产生的计数误差,主要源于计数开始和计数结束时刻,由高频脉冲和转速信号进行与逻辑产生的1个脉冲误差。
实验二:步进电动机型号为42BYG250-47,配套驱动器型号为ZD-8731,控制器型号为DY-IS;设计的磁极片数为50;霍尔传感器型号为3144。设置步进电动机为连续运行,频率为600 Hz,实验得到的角加速度情况如图7所示。
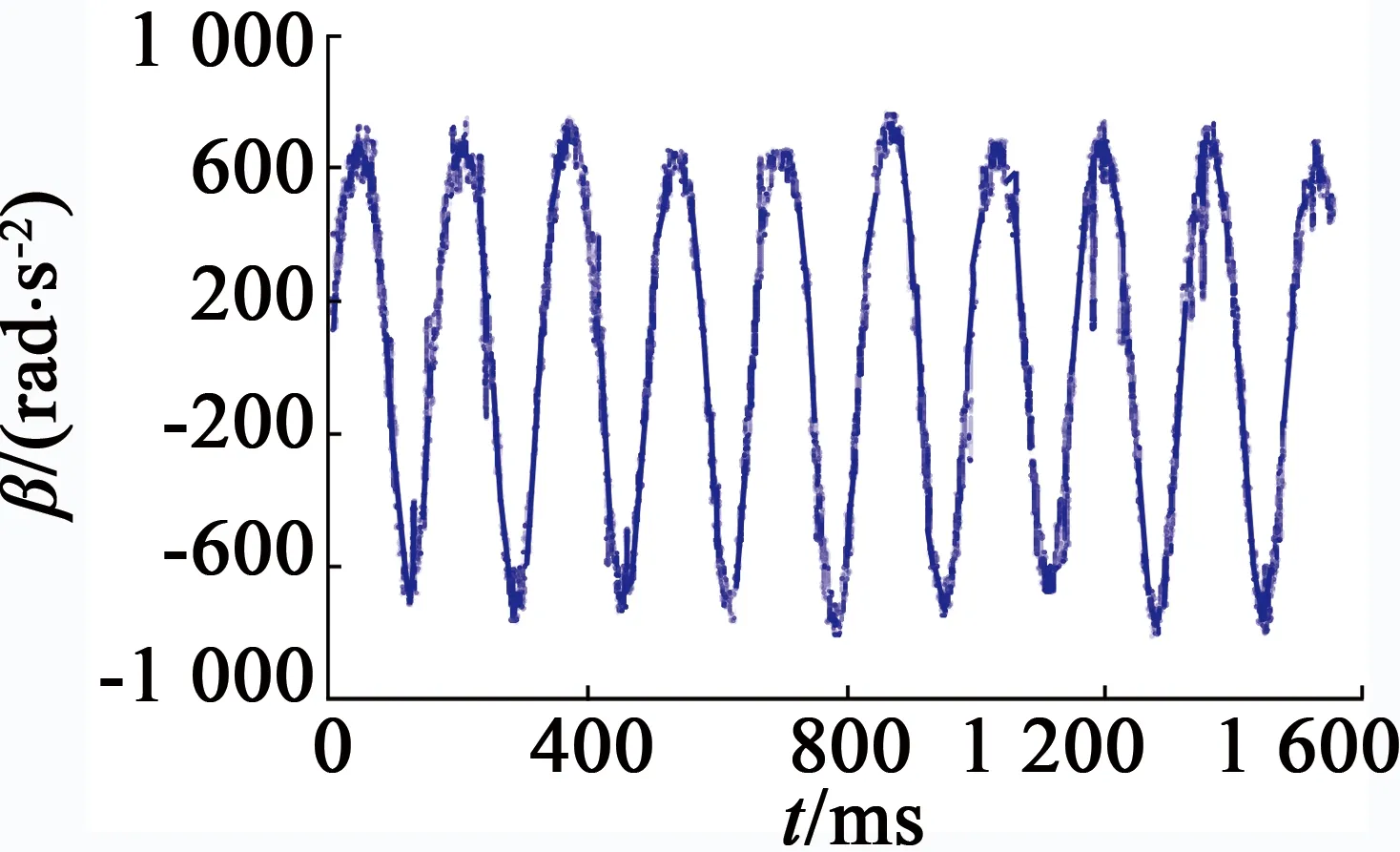
图7 步进电动机角加速度实验结果
根据实验二结果可知,步进电动机运行时,转子系统存在明显的旋转角加速度,产生的原因主要是由于步进电动机定子产生的电磁驱动转矩为正弦规律,且定子磁场以跳跃方式旋转,最终导致步进电动机转子运行时产生角加速度,同时表明本文设计的角加速度测量系统能够正确的测量实际旋转设备的角加速度值,具有较强的实用性。
4 结 语
本文提出了一种基于FPGA的霍尔式旋转机械角加速度测量系统,详细阐述了系统的整体构成和角加速度的数字微分测量原理,给出了角加速度测量系统的实现方法,并通过仿真验证了测量原理的正确性和设计的可行性。最后对实际旋转设备进行了角加速度测试实验,结果表明该系统能够正确的测量实际旋转设备的角加速度值,且该测量系统具有响应速度快、测量精度高等优点,具有较强的实用性。
[1] 梁伟,冯枫,鲍学良,等.角加速度传感器及其应用[J].长春工业大学学报,2012,33(3):311-316.
[2] 赵浩,冯浩.基于电磁感应原理的永磁角加速度传感器研究[J].传感技术学报,2012,25(9):1257-1261.
[3] 赵浩,冯浩.一种电磁感应式角加速度传感器及误差分析[J].计量学报,2012,33(6):536-540.
[4] 李建利,房建成,盛蔚.一种新型力平衡扭摆式硅MEMS角加速度传感器[J].仪器仪表学报,2008,29(1):73-77.
[5] 吴校生, 陈文元.角加速度计发展综述[J].中国惯性技术学报,2007,15(4):458-463.
[6] 李博,张锋,黄镇昌.基于LabVIEW的角速度、角加速度测试仪[J].仪表技术与传感器,2005(9):8-9.
[7] 秦莹莹,郭喜庆,刘伟.基于PCI和FPGA的转台检测系统[J].仪表技术与传感器,2011(3):74-76.
[8] 何玉庆,韩建达.一种新的角加速度估计方法及其应用[J].控制理论与应用,2007,24(1):6-12.
Study and Application of a Hall Angular Acceleration Measurement System for Rotating Machinery
HUANG Xiao-ping
(Nanning University,Nanning 530200,China)
A new angular acceleration measurement system based on FPGA is presented in order to reflect machine′s state. Firstly, the speed signal is obtained through the hall sensor and the magnets that installed on the shaft of rotary system, then the speed signal is processed by filtering and shaping, and digital differential by FPGA, the angular acceleration of rotary system is received finally. The theoretical formula of angular acceleration is deduced, and the angular acceleration measurement principle is simulated by software. Last, the angular acceleration of actual rotating equipment is tested, and the result of experiments show that the angular acceleration measurement device of this paper with strong practicability.
angular acceleration; FPGA; Hall sensor; stepper motor
2016-04-05
广西高校科研项目 (KY2015YB529);广西高等教育本科教学改革工程项目(2015JGB439);广西“十二五”教育规划资助经费重点课题(2015A028)
TM306
A
1004-7018(2016)10-0047-03
黄孝平(1973-),男,硕士,高级工程师,研究方向为智能控制、嵌入式系统等。