基于主动磁链修正的异步电机六拍转矩控制方法
2016-12-20廖振宇
廖振宇
(内蒙古化工职业学院,呼和浩特 010070)
基于主动磁链修正的异步电机六拍转矩控制方法
廖振宇
(内蒙古化工职业学院,呼和浩特 010070)
为了提高异步电机直接转矩控制(DTC)系统弱磁升速性能,提出了一种基于主动磁链修正的异步电机六拍转矩控制方法。首先分析了传统异步电机直接转矩实现机理,并指出DTC内在固有的过调制特性;在此基础上,为了进一步提高DTC系统转矩输出能力,介绍了基于主动磁链修正的六拍转矩控制的实现过程,其经过了三矢量、两矢量和单矢量的演变,对应定子磁链由运行磁场由圆形变化为六边形。最后,基于45 kW高速异步电机样机平台进行测试与分析,结果表明主动磁链修正的DTC可有效拓宽电机恒转矩运行区域。同时,弱磁升速过程中驱动系统的电压、电流均运行于最大值,保证了逆变器的最大利用率和最大转矩输出能力。
直接转矩控制;异步电机;弱磁升速;六拍控制
0 引 言
随着近年来电动汽车、轨道牵引等高速电驱动应用的不断发展,此时对感应电机驱动系统的过调制运行和弱磁升速能力提出了更高的要求,如何在宽速域范围内实现输出转矩的最大化成为行业难题[1-4]。现阶段,大量文献针对矢量控制(Field Oriented Control,FOC)系统弱磁升速方法展开相关研究,如负id电流补偿法[5]、梯度下降法[6]、公式计算法[7]等。纵观上述方法可知,弱磁升速的关键在于如何实现感应电机有限的电压和电流的利用率最大化。六拍运行[8]可实现PWM调制环节最大电压输出,其在FOC系统弱磁升速中意义重大,文献[9]中指出,基于六拍调制的矢量控制系统其恒转矩运行区域为传统矢量控制的1.13倍。
直接转矩控制(Direct Torque Control,DTC)作为高性能电机驱动的另一种解决方法,将变频器与感应电机看成一个整体,可实现快速的转矩响应特性。然而,由于DTC系统中不存在FOC系统中的PWM调制环节,实际DTC系统设计过程中无法对变频器最大输出电压进行有效评估,文献[8,10]对DTC系统弱磁升速方法进行介绍,其弱磁环节切入点均参照了PWM调制的线性运行区域,无法实现DTC系统输出电压的最大化利用(即六拍运行)。
为了提高异步电机直接转矩控制(DTC)系统弱磁升速性能,提出了一种基于主动磁链修正的异步电机六拍转矩控制方法。本文首先分析了传统异步电机直接转矩实现机理,并指出DTC内在固有的过调制特性;在此基础上,为了进一步提高DTC系统转矩输出能力,介绍了基于主动磁链修正的六拍转矩控制的实现过程,其在加速过程中经过三矢量、两矢量和单矢量的演变过程。最后,基于45 kW高速异步电机样机平台进行测试与分析,结果表明主动磁链修正的DTC可将恒转矩区域拓宽至传统DTC的1.17倍。同时,弱磁升速过程中驱动系统的电压、电流均运行于最大值,保证了驱动装置的最大利用率和最大转矩输出。
1 感应电机DTC系统建模
1.1 感应电机数学模型
图1所示为高速感应电机驱动系统主电路,驱动装置为三相全桥式两电平拓扑,三相开关器件分别为Sa1,Sa2,Sb1,Sb2,Sc1,Sc2,直流母线电压为Udc。假设感应电机驱动系统为三相理想对称,建立其定子磁链定向坐标系下的电压、磁链和转矩矢量方程:

(a)IM系统结构图(b)电压空间矢量图
图1 高速感应电机驱动系统主电路
(1)
(2)
(3)
(4)
(5)
式中:Us为电机端口电压;Te为电机电磁转矩;p为电机极对数;ψs,ψr为定、转子磁链;is,ir为定、转子电流;Ls,Lr,Lm为定子、转子电感及互感;ωs,ωm为定子磁链、转子角速度;δsr为定转子磁链夹角;δ为漏感系数,其表达式:
(6)
1.2 磁链和转矩变化规律
假设感应电机有足够的激磁电流来维持定子磁链为额定值,则感应电机在其额定转速以下均可保持恒转矩运行。式(5)表明,当定、转子磁链保持幅值恒定时,定转子磁链夹角δsr将直接决定输出电磁转矩能力。将式(5)对时间t进行微分运算得:
(7)
式中:⊗为叉乘符号。
将式(1)、式(2)代入式(7)进一步化简可得转矩微分方程的具体形式:
(8)
分析式(8)可知,感应电机转矩微分方程由三部分组成: 第一部分与负载转矩成反比,第二部分与转速相关,最后一部分反映了定子电压矢量对转矩的影响。其中,仅第三部分中定子电压矢量为DTC系统可控量。同理,对定子磁链幅值|Ψs|微分:
(9)
式(9)中电压矢量Us同样对定子磁链幅值的变化规律起着决定性作用。
1.3 最大输出电压分析
分析式(8)、式(9)可知,电压矢量Us对于DTC系统磁链、转矩的意义,然而对于实际DTC系统其输出电压矢量Us并非无穷大。图2给出了感应电机低速、高速段电压矢量关系,定子磁链幅值|ψs|始终维持额定值,且矢量关系图以定子磁链为d轴定向方向。图2(a)中电机为低速运行,定子端电压足以调节较小的反电动势jωsψs幅值,即电机定子磁链的幅值和角度进行有效控制;图2(b)中电机为高速运行,定子端电压将在额定转速时到达电压矢量六边形边界,DTC系统将无法完成对定子磁链幅值和角度的有效调节。

(a)低速运行(b)高速运行
图2 感应电机低速、高速段电压矢量关系
为了保证反电动势jωsψs不随电机转速ωs的进一步增大而扩大,需对应降低其定子磁链ψs:
(10)
式中:Vmax为逆变器最大输出电压幅值。
通常为了保证DTC系统对于磁链、转矩的调节能力,通常参照PWM调制线性调制原理取Vmax:
(11)
式中:Udc为图1中逆变器直流母线电压。
2 DTC系统六拍运行原理

2.1 过调制区Ⅰ


图3 过调制区Ⅰ电压与磁链对应关系
图3(a)中电压矢量在第Ⅰ扇区被划分为ab,bc,cd三段,ab和cd段处于六边形矢量内部,对应图3(b)中定子磁链由v1,v2,v0,v7四矢量调节;bc段处于六边形矢量外部,对应图3(b)中定子磁链由v1,v2两矢量调节。可以看出,在过调制模式I虽然某些时刻电压矢量已超出逆变器限制六边形,但DTC方法仍可拟合出圆形定子磁链。综上可知,DTC方法内在隐含了Ⅰ区过调制特性。
2.2 过调制区Ⅱ

图4 过调制区Ⅱ磁链切换规律
根据图4中定子磁链角度θs与切换点θp的位置关系可知,DTC系统定子磁链矢量期望角度和幅值:
(12)

(13)
式中:n为扇区号,n∈[1,6]。
3 磁链及转矩脉动分析
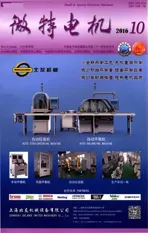
图5所示为不同电压矢量对应定子磁链变化规律,图5(a)为满足式(11)的线性调节范围内的电压、磁链对应规律,定子电压矢量Vs由两个有效矢量和一个零矢量组合而成,稳态运行时电压矢量和磁链矢量均为标准圆形;图5(b)中,定子电压矢量Vs被拓宽至六变形边界处,定子电压矢量Vs由两个有效矢量组合而成,稳态运行时电压矢量变为标准六边形;图5(c)中,定子电压矢量Vs运行于六拍控制模式,此时定子磁链矢量变为标准六边形,可实现逆变器输出电压的最大化利用。然而,六边形定子磁链矢量不可不免的引起式(5)转矩方程出现低频转矩脉动。为此,有必要对感应电机转矩、磁链特性加以分析。
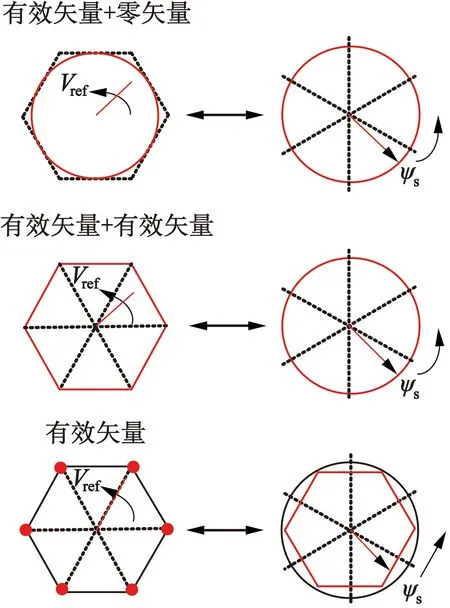
图5 不同电压矢量对应定子磁链变化规律
首先,在复矢量坐标系下对定子磁链ψs进行傅里叶级数展开:
(14)
考虑到感应电机DTC驱动系统为三相理想对称,可写出式(14)中任意阶次的谐波分量幅值:
(15)
进一步推导可得,定子磁链矢量的均方根误差:
(16)
同理可得,感应电机电磁转矩的的均方根误差:
(17)
式中:r为六拍电压矢量幅值,即2/3Udc。
分析式(16)、式(17)可知,感应电机磁链及转矩脉动随六拍电压矢量幅值r呈线性增加趋势,由此可见,当DTC系统切换至六拍运行模式时系统磁链及转矩脉动出现最大值。
4 样机实验与结果分析
为了验证基于主动磁链修正的感应电机六拍直接转矩控制方法的可行性和有效性,基于图6所示的45kW感应电机驱动系统软、硬件平台。图6(a)中数字处理系统采取单FPGA片上系统,由Xilinx公司Spartan6E型号FPGA和相关外围电路组成,主要完成:主动磁链修正算法及DTC控制功能。同时,协调完成AD采样、数据存储、死区补偿、脉冲封锁等功能。图6(b)软件框图中包含:转矩滞环、磁链滞环、离线查找表以及磁链矢量修正环节,此外电机状态观测器采取文献[11]中介绍的全阶闭环观测器,可以保证DTC系统在低、中、高全速域的观测精度。 表1给出了实验样机参数。

(a) 样机平台

(b) 软件框图
符号/单位数值符号/单位数值ψs/Wb1.5Udc/V600Ls/mH0.5UN/V380Lr/mH0.5IN/A95Lm/mH0.48ωm/(r·min-1)750p4Ts/μs100


(a)样机平台(b)软件框图
图7 零速加速测试结果
在0.35~0.80s恒功率区,电机输出功率Pm维持不变,对应激磁电流iM逐步降低以实现电机弱磁功能。
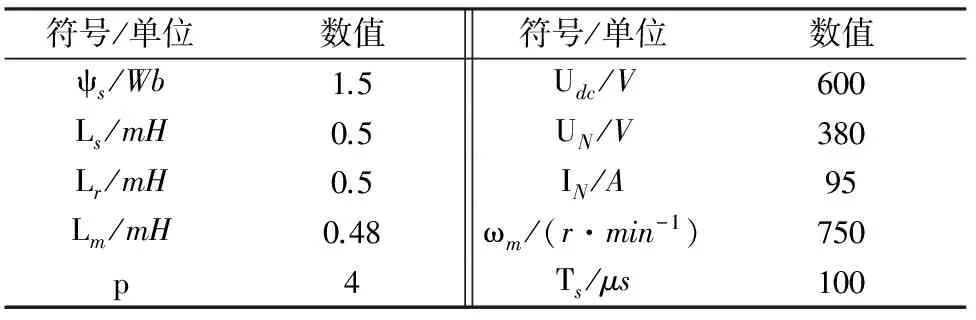
图7中给出了电机零速加速测试结果,可以看出图中有两个关键的切换点,即0.36s弱磁启动、0.52s六拍运行,为了进一步分析此时对应逆变器工作状态,图8给出了DTC系统过调制切换过程。图8(a)为过调制I切换过调制Ⅱ区过程,其中切换点出现在0.36s,切换前后定子磁链ψαβ由圆形切换至六边形,且输出电压矢量编号n仅包含1~6的有效电压矢量,不再包含0和7的零电压矢量。图8(b)为过调制II切换六拍运行过程,其中切换点出现在0.52 s,切换之后线电压uab在单个基波周期内仅切换6次,对应电压矢量编号n规律性的在1~6之间切换,且切换过程磁链幅值和相位平滑无冲击,保证了感应电机整个加速过程的平稳和高效。图9给出了稳态转矩频谱分析结果,其中除直流分量、高频谐波分量外,包含严重的6倍基波(100 Hz)分量,上述分量是由于六拍输出电压特性所产生,与式(17)推导结果一致。

(a)过调制Ⅰ切换过调制Ⅱ(b)过调制Ⅱ切换六拍运行
图8 过调制切换过程
图9 稳态电流频谱分析结果
5 结 语
本文研究了一种基于主动磁链修正的异步电机六拍转矩控制方法,通过相关理论分析和样机实验验证可得出以下结论:(1)基于主动磁链修正的六拍转矩控制的实现过程,需经过三矢量、两矢量和单矢量的演变过程,对应定子磁链由运行磁场由圆形变化为六边形;(2)主动磁链修正的DTC可有效拓宽电机恒转矩运行区域,并将逆变器在整个加速过程中运行至最大电压、最大电流输出点。
[1] 文建平,曹秉刚.电动车用内嵌式永磁同步电动机弱磁调速研究[J].微特电机,2015,43(3):49-50.
[2] 刘洋,赵金,耿涛.基于间接矢量控制的感应电机高速弱磁区电流控制[J].电工技术学报,2011(9):100-104.
[3] 杨根胜.一种改进的感应电机查表法弱磁控制策略[J].电机与控制应用,2015(2):26-30.
[4]HANSH,SOONGWL,JAHNSTM,etal.Reducingharmoniceddy-currentlossesinthestatorteethofinteriorpermanentmagnetsynchronousmachinesduringfluxweakening[J].IEEETransactionsonEnergyConversion,2010,25(2):441-449.
[5] 朱永彬,林珍.电动汽车用永磁同步电动机弱磁研究综述[J].电气技术,2015(10):1.
[6] 陈坤华,孙玉坤,吉敬华,等.内嵌式永磁同步电动机弱磁控制分段线性化研究[J].电工技术学报,2015,30(24):17-22.
[7] 王子函,于海生.端口受控哈密顿方法的永磁同步电动机弱磁扩速[J].微特电机,2015,43(10):48-52.
[8]SONGJianguo,ZHANGQinglu,XIEPengfei.Theresearchofflux-weakencontrolaboutipmsmoftheelectriccars[J].AppliedMechanics&Materials,2014,556-562:2317-2320.
[9] 窦汝振,温旭辉.永磁同步电动机直接转矩控制的弱磁运行分析[J].中国电机工程学报,2005,25(12):117-121.
[10]KWONYC,KIMS,SULSK.Six-stepoperationofpmsmwithinstantaneouscurrentcontrol[J].IEEETransactionsonIndustryApplications,2012,50(4):479-486.
[11] 刘洋,史黎明,赵鲁,等.一种基于混合型磁链观测器的异步电机直接转矩控制[J].电工技术学报,2015,30(10):157-163.
Six Steps Torque Control Method for Induction Motor Based on Active Flux Correction
LIAO Zhen-yu
(Inner Mongolia Vocational College of Chemical Engineering,Hohhot 010070,China)
In order to improve DTC for asynchronous motor system weak magnetic speed-speed performance, six-beat torque control method based on active flux correction was proposed. The traditional asynchronous motor directly turned moment achieved mechanism was analyzed, and DTC inner inherent of over modulation characteristics was pointed out; to further improve DTC system turned moment output capacity, based on active magnetic chain amendment of six took turned moment control of achieved process was introduced, its after has three vector, and two vector and single vector of evolution, corresponds to stator magnetic chain by run magnetic field by round changes for hexagon. Finally, based on a 45 kW asynchronous motor, results show that DTC active flux correction can effectively broaden motor with constant torque operating area. In speed-up process, weak magnetic drive system voltages and currents are running at maximum value to ensure the maximum utilization of the inverter output and maximum torque capacity.
direct torque control; induction motor; weak magnetic speed; six-step control
2016-04-07
国家自然科学基金项目(51377020)
TM343
A
1004-7018(2016)10-0089-05
廖振宇(1977-),男,硕士,研究方向为大功率矿山电力驱动系统及自动化工程设计。