基于TSPWM的车用交流感应电机控制器设计
2016-12-20倪荣来李军伟陆海峰
倪荣来,李军伟,陆海峰,高 松,王 冬
(1.山东理工大学,淄博 255049;2.清华大学,北京 100084;3.北京乾勤科技发展有限公司,北京 100084
基于TSPWM的车用交流感应电机控制器设计
倪荣来1,李军伟1,陆海峰2,高 松1,王 冬3
(1.山东理工大学,淄博 255049;2.清华大学,北京 100084;3.北京乾勤科技发展有限公司,北京 100084
针对低速电动车所用两电平逆变器共模电压(CMV)严重的问题,采用新型PWM调制方法TSPWM(Tristate Space Pulse Width Modulation),结合英飞凌32位微控制芯片XMC4200,在不增加硬件成本的条件下,设计了一套共模电压明显减小的车用交流感应电机控制器。提出了基于基本电压矢量作用时间和三相PWM占空比的TSPWM新的实现方法。研究了TSPWM与XMC4200结合产生新型PWM信号的方法,同时利用Matlab/Simulink和Dave3分别自动生成控制算法和底层驱动代码,并装载到以XMC4200为核心的电机控制器中进行试验。试验表明,采用TSPWM控制的感应电机具有较小的共模电压,所设计的控制器实现简单,具有较好的控制性能。
感应电机;共模电压;TSPWM;XMC4200;自动代码生成;试验
0 引 言
由于高可靠性和低成本,交流感应电机(以下简称ACIM)成为电动车驱动电机应用最广泛的电机之一。成熟的矢量控制技术与先进的微控制器芯片的结合为感应电机的高性能控制提供了条件。低速电动车所用的电机控制器大多使用两电平逆变器。然而,在使用两电平逆变器对感应电机供电时,由于电机中性点悬空,传统SVPWM调制的不同PWM开关状态组合会在电机绕组中性点和参考地之间产生髙幅值(最大峰值可到直流母线电压)且高频交变的共模电压。该共模电压不仅会对周围附件设备产生电磁干扰,而且是产生轴电压的主要根源,严重时会击穿电机轴油膜形成轴电流,破坏电机的轴承,缩短电机的使用寿命[1-3]。目前抑制电机共模电压的方法主要分为两类:(1)增设硬件或改善电路,如采用共模滤波器[4-5]、共模电感、共模抑制变压器[6]和共模扼流线圈[7]等;但是,这些方法会增加电机控制器的成本。(2)改进PWM调制策略。文献[8-9]采用两相位差180°的基本电压矢量等效零矢量,将共模电压限制到直流母线电压的1/6,但会引起电机转矩脉动;文献[10]只使用非零矢量合成参考电压矢量,有较大的电流纹波;文献[11-12]提出在同一时刻使两相桥臂功率器件同时切换开关状态,控制算法复杂,实际应用难度大。而且,多数文献提出的PWM改进策略并未给出应用到电机控制器的具体实现方法。
为弥补上述不足,基于TSPWM的原理,采用三个基本电压矢量,根据不同电压区域,结合零矢量合成参考电压矢量对感应电机控制器进行具体设计。为降低感应电机共模电压的控制器设计提供了一种新思路。
1 TSPWM原理及实现
1.1 TSPWM原理
传统SVPWM需要使用零矢量来合成参考电压矢量。而在两电平逆变器中,零矢量时的MOS管开关状态并不是中性点电压为零的状态。逆变器在零矢量状态下,电机中性点和电机本体之间便会形成共模电压,进而形成轴电流,损坏电机轴承,缩短电机使用寿命。为了减小电机共模电压,TSPWM使用3个相邻的基本电压矢量来合成参考电压矢量[13]。如图1(b)所示,U2是与参考电压矢量Uref最近的基本电压矢量,故将U2选作此时的中心电压矢量。按照顺时针方向,将U3和U1分别选作参考电压矢量的左、右基本电压矢量。
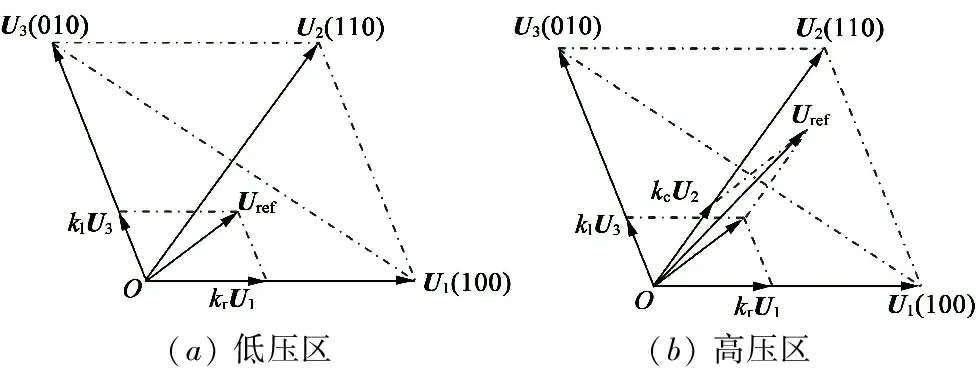
(a)低压区(b)高压区
图1TSPWM参考电压矢量重构方法
从图1(b)中,根据矢量合成关系,可以得到:
(1)
式中:kl,kc,kr分别是左、中、右基本电压矢量占空比。
将图1中Uref所在的区域分别定义为低压区和高压区。根据共模电压形成机理,由于高压区没有使用零矢量,共模电压的峰峰值被限制到直流母线电压Udc的1/3。如果参考电压矢量Uref在低压区,如图1(a)所示,参考矢量由两个基本电压矢量和一个零矢量合成。根据矢量合成关系,同样得:
(2)
此时,基本电压矢量U1(100)和U3(010)只有一路(奇数)MOS管处于导通状态。为了使MOS管开关频率最小,选择U0(000)作为中间过渡的零矢量。其他情况下,若左右两个基本电压矢量有两路(偶数)MOS管处于导通状态,则选择U7(111)作为中间过渡的零矢量。可以推导,在低压区,共模电压的峰峰值同样被限制到Udc/3。
1.2 TSPWM扇区划分及选择
根据TSPWM矢量合成的思想,将电压矢量正六边形区域划分为6个扇区,每个扇区覆盖60°的区域,且每个扇区分成高低压两个区。划分后的6个电压扇区如图2所示。
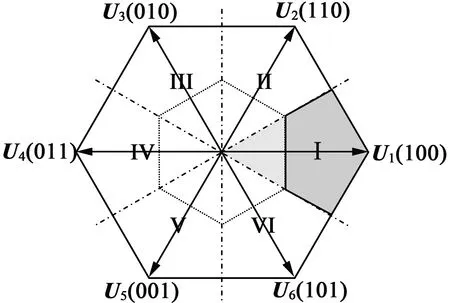
图2 TSPWM电压扇区划分示意图
根据图2的扇区划分,图1(b)中的参考电压矢量Uref在第二扇区高压区。基本电压矢量作用的顺序为U1(100)-U2(110)-U3(010)-U2(110)-U1(100)。如果参考电压矢量Uref在第二扇区低压区,U1和U3保持不变,将U2替换为U0,则基本电压矢量作用顺序变为U1(100)-U0(000)-U3(010)-U0(000)-U1(100)。对于其他扇区,可以按照相同的规则合成参考电压矢量。为了根据参考电压矢量确定其所在的扇区,需要使用两相到三相坐标变换:
(3)
式中:UA,UB,Uc分别为参考电压矢量Uref在三相坐标系A,B,C轴上的分量;Uα和Uβ为参考电压矢量Uref在静止两相坐标系αβ轴上的分量。
根据UA,UB,Uc将A,B,C分别定义:
(4)
其中,sign(x)函数的定义:
(5)
定义N=4A+2B+C,则参考矢量所在扇区号和N的对应关系如表1所示。

表1 TSPWM扇区号与N的对应关系
1.3 TSPWM占空比计算
在静止两相坐标系下,Uref=Uα+jUβ。现在将参考电压矢量Uref分解到xyz三个轴上,如图3所示。将变量x,y,z定义:
(6)

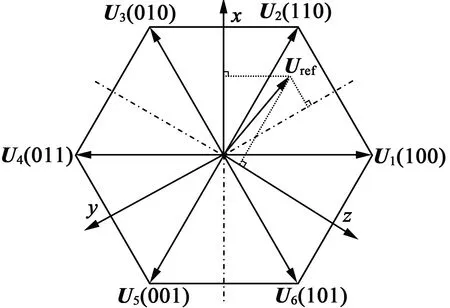
图3 参考电压矢量分解示意图

(a)低压区(b)高压区
图4 基本电压矢量作用时间计算示意图
图4中参考电压矢量 在第2扇区,则根据矢量合成关系,可得:
(7)
则μl,μr和N的对应关系如表2所示。

表2 μl,μr和N的对应关系
如果Uref在低压区,如图4(a)所示,根据式(2)、式(7)以及三角形相似关系得:
(8)
结合图5(a)中的PWM波形,可以推导出,当参考电压矢量在低压区时,三相的占空比:
(9)
当参考电压矢量在高压区时,如图4(b)所示,根据式(1)和几何关系可得:
(10)
化简后:
(11)
结合图5(b)中的PWM波形,可以推导出,当参考电压矢量在高压区时,三相的占空比:
(12)

(a)低压区(b)高压区
图5 第二扇区PWM波形
由式(9)和式(12)可以看出,无论参考电压矢量在高压区还是低压区,三相PWM的占空比都可以通过相同的公式计算得到,简化了实现过程。
根据上述计算过程,参考电压矢量在6个扇区、三相上的占空比如表3所示。

表3 三相占空比与N的关系
2 基于TSPWM的控制器设计
2.1 主控芯片XMC4200概述
XMC4200芯片是英飞凌公司推出的一款基于ARM Cortex-M4的高性能微控制器,集成了ARM Cortex-M4 CPU、程序和数据存储器、多种通信外设、多通道高分辨率模拟前端外设、工业控制外设以及多状态可编程端口驱动控制模块。
XMC4200的CPU内核具有DSP(数字信号处理)特性和FPU(浮点运算单元)能力,能够应对更加复杂的控制算法。在XMC4200中,所有外设单元可以通过灵活的总线矩阵连接到CPU或系统上。内部连接矩阵使各外设之间很方便实现相互关联触发。配合32位 ARM Cortex-M4内核和大容量存储器,XMC4200满足高性能电机的控制要求。
2.2 结合TSPWM的PWM模块设计
在感应电机控制器中,主控芯片根据整车控制器的指令以及整车系统状态产生相应占空比的PWM信号,驱动逆变器,进而控制电机运行。
在XMC4200中,PWM信号通过CCU8模块产生。每个CCU8模块包含4个16位可独立工作在比较或者捕获模式的定时器片。每个定时器片可产生4路带死区PWM信号。每个CCU8模块有4条服务请求线,可以方便实现同步触发PWM信号产生和ADC转换。CCU8模块具体结构如图6所示。

图6 CCU8模块的结构框图
电机控制中,需要产生3对(6路)互补且带死区的PWM。本文使用CCU8产生满足要求的PWM,硬件配置如表4所示。

表4 CCU8产生PWM信号配置
为了配置出TSPWM要求的PWM波形,在将CCU8按照表4配置后,还需要根据参考电压矢量所在的扇区,在中断函数内实时更改定时器片有效电平。在CCU8模块中,定时器片有效电平通过寄存器CCU80_CC80_PSL、CCU80_CC81_PSL、CCU80_CC82_PSL进行配置。根据TSPWM中参考电压矢量在不同扇区的PWM波形,对三个定时器片的有效电平配置如表5所示。
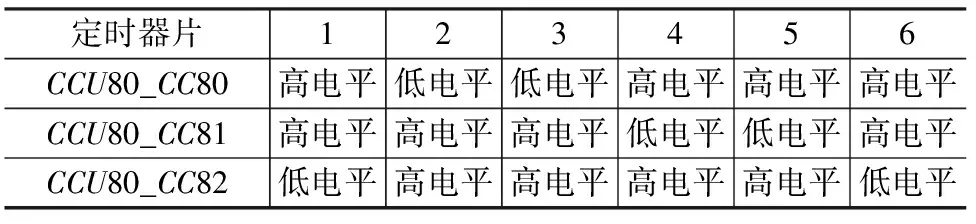
表5 定时器片有效电平与N的关系
3 基于TSPWM的矢量控制算法开发
3.1 控制算法代码自动生成
根据矢量控制原理和TSPWM原理,在MATLAB/Simulink环境下建立速度调节器模型,磁链电流和转矩电流调节器模型,Clarke、Park、逆Park变换模型、电流模型和TSPWM模型,如图7所示。

图7 基于TSPWM的矢量控制自动代码生成模型
建立控制算法自动代码生成模型后,采用RTW(Real-TimeWorkshop)使Simulink模型生成基于英飞凌32位微控制器芯片的C代码。控制器逆变器采用的MOSFET功率管最高开关频率为20kHz,综合考虑主芯片系统时钟频率,将Simulink模型中的执行步长设为0.000 1,对应的PWM周期为 。为了自动生成的嵌入式代码紧凑、高效,在RTW选项卡中,选择ert.tlc作为系统目标文件。配置完成后,编译模型,生成控制算法代码。
3.2 底层驱动代码自动生成
主控芯片XMC4200所用的Dave3集开发环境和底层驱动模块于一体,简化了底层驱动代码与控制算法结合的过程。Dave3具有基于预定义且经过测试的软件模块DAVEApps和可视化配置界面,如图8所示。根据上层控制算法,选取ADC002模块采集电机两相电流;选取POSQE001模块实现M法和T法结合测量电机转速;选取PWMMP001模块产生实现TSPWM所需的PWM信号。根据实际调试需要,选择相应的其余模块,如选取CAN001模块实现上位机与控制器之间通信,从而实时调节控制算法参数和观测电机运行数据。
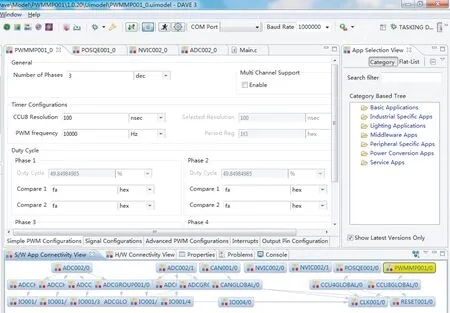
图8 Dave3可视化配置界面
各个模块配置完成后,编译自动生成底层驱动代码。将Simulink模型生成的控制代码与Dave3生成的底层驱动代码整合到一个工程文件下,编译生成Hex文件类型的感应电机控制器控制程序。
4 基于XMC4200的TSPWM试验验证
将采用TSPWM矢量控制的程序代码烧写到以XMC4200为主控芯片的感应电机控制器中,对所设计的ACIM矢量控制系统进行试验,测试对比SVPWM和TSPWM控制下的电机共模电压,并验证TSPWM应用在电动汽车电机控制系统的正确性和可行性。搭建试验平台的装置主要包括:ACIM、磁粉制动器、60V蓄电池、上位机、基于XMC4200核心控制板的电机控制器等。试验平台如图9所示。

图9 TSPWM试验平台实物图
试验中所用ACIM的铭牌参数如表6所示。功率电源采用5块12V的蓄电池串联供电。磁粉制动器最大制动扭矩为400N·m,通过磁粉张力控制器调节电流改变制动扭矩,以测试电机的负载特性。试验中电机控制器和电机的主要参数数据通过USBCAN实时传输到上位机,以便观察调试;电机控制器的参考励磁电流、参考转矩电流、参考速度等参数也可通过上位机给定。上位机界面如图10所示。
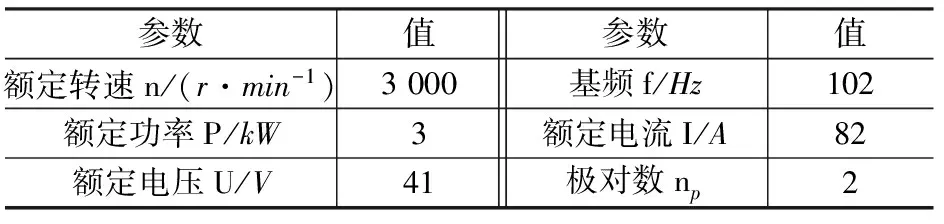
表6 ACIM铭牌参数
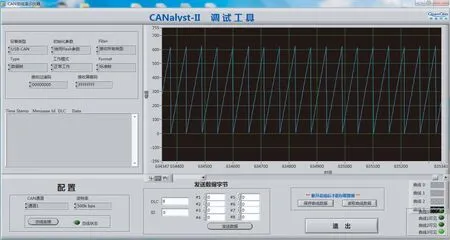
图10 上位机调试界面
在上位机中,将TSPWM三相的占空比、电机单相电流采样的数据保存并导入MATLAB作图,如图11、图12所示。在给定转矩电流0.8(标幺值)时,转速从100r/min加速到3000r/min,每隔200r/
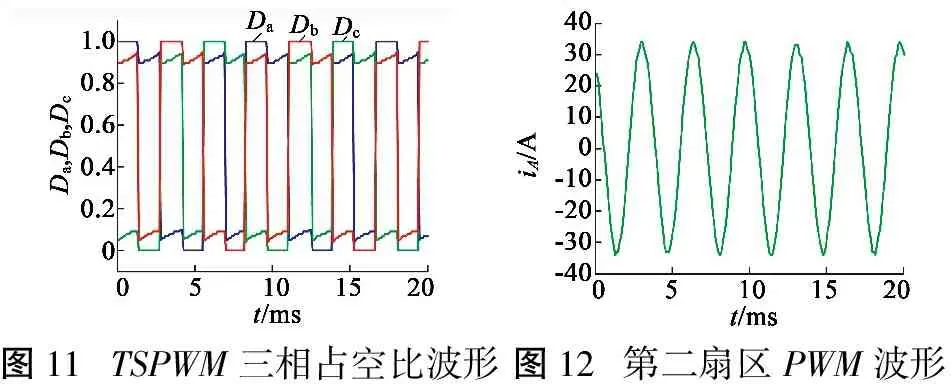
图11TSPWM三相占空比波形图12第二扇区PWM波形
min记录下对应的磁粉张力控制器电流。计算出磁粉张力控制器电流所对应的转矩,结合其对应的转速,利用MATLAB拟合出电机外特性曲线,如图13所示。采用SVPWM和TSPWM控制的电机共模电压峰峰值试验结果分别如图14、图15所示。
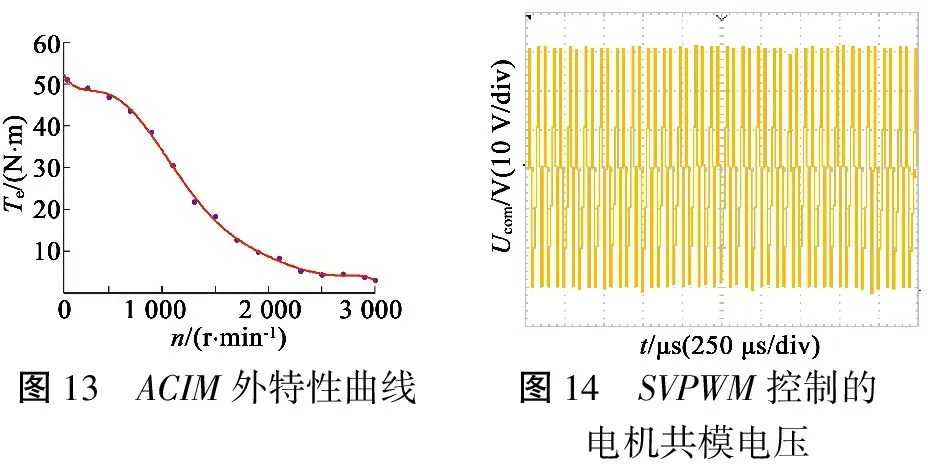
图13 ACIM外特性曲线图14 SVPWM控制的电机共模电压

(a)低压区(b)高压区
图15TSPWM控制的电机共模电压
由图11可以看出TSPWM三相占空比与SVPWM一样呈现周期性变化,不同之处在于TSPWM可以产生100%和0的占空比。这两种占空比使得单相桥臂上的功率器件全开或全闭,减少了功率器件开关次数,提高了控制器效率。图12为ACIM速度电流双闭环控制稳定运行时的单相电流波形,图中相电流波形连续稳定,正弦度好。由图13可以看出,电机在低速运转时可以输出较大过载扭矩,在较宽调速范围内可以输出额定扭矩。
由图14可以看出,采用SVPWM控制的电机共模电压的峰峰值为Udc。由图15可以看出,在低压区和高压区时,TSPWM控制的电机共模电压峰峰值都被限制到Udc/3。由图11~图15可以看出,采用TSPWM的感应电机控制器比采用SVPWM的电机控制器具有更小的共模电压,在提高控制器效率的情况下,能够控制电机平稳运行,在不同转速下可以控制电机输出满足电动汽车驱动要求的扭矩,满足电动汽车对驱动电机控制器的要求。
5 结 语
本文针对两电平逆变器共模电压严重的问题,以TSPWM原理为基础,结合各个基本电压矢量作用时间和三相占空比,将TSPWM新的实现方法应用到核心为XMC4200的感应电机控制器中。利用自动代码生成技术完成对控制器的控制算法开发,并进行了试验。在降低感应电机共模电压的条件下,验证了TSPWM应用在车用感应电机控制器上的可行性。
[1]SIDNEYB,COOKSONTIMOTHYJ,COPESTEVENA,etal.Experiencewithvariable-frequencydrivesandmotorbearingreliability[J].IEEETransactionsonIndustryApplications,200,37(5):1438-1446.
[2] 姜卫东,王群京,陈权,等.一种完全基于两电平空间矢量调制的三电平空间矢量调制算法[J].电工技术学报,2009,24(1):108-114.
[3] 姜艳姝,徐殿国,刘宇,等.PWM驱动系统中感应电动机共模的研究[J].中国电机工程学报,2004,24(12):149-155.
[4]HEDAYATIMH,ACHARYAAB,JOHNV.Common-modefilterdesignforPWMrectifier-basedmotordr-ives[J].IEEETransactionsonPowerElectronics,2013,11(28):5364-5371.
[5] 陈希有,徐殿国,马洪飞.兼有共模电压抑制作用的逆变器输出无源滤波器[J]. 电工技术学报,2002,6(17):38-42.
[6]JIItoh,ABET.Circulationcurrentreductionforamotorsimulatorsystemusingapowerconverterwithacommonmodetransformer[C]//IEEEInternationalPowerElectronicsandMotionControlConference.IEEE,2009:1662-1667.
[7] 颜伟,赵阳,王恩荣,等.复杂电子系统传导EMI噪声机理分析与处理[J].中国电机工程学报,2012,32(30):156-162.
[8]UNE,HAVAAM.Ahigh-performancePWMalgorithmforcommon-modevoltagereductioninthree-phasevoltagesourceinverters[J].IEEETransactionsonPowerElectronics,2011,26(7):1998-2008.
[9] 章勇高,邝光健,龙立中.三相逆变器的无零矢量共模电压抑制技术研究[J].电力系统保护与控制,2013,41(2):138-143.
[10]LAIYS,SHYUFS.Optimalcommon-modevoltagereductionPWMtechniqueforinvertercontrolwithconsiderationofthedeadtimeeffects-partI:Basicdevelopment[J].IEEETransactionsonIndustryApplications,2004,40(6):1605-1612.
[11]HAVAAM,UNE.Performanceanalysisofreducedcommon-modevoltagePWMmethodsandcomparisonwithstandardPWMmethodsforthree-phasevoltagesourceinverters[J].IEEETransactionsonPowerElectronics,2009,24(1):241-252.
[12]LAIYS,CHENPS,LEEH-K,etal.Optimalcommon-modevoltagereductionPWMtechniqueforinvertercontrolwithconsiderationofthedead-timeeffects-PartII:applicationstoIMdriveswithdiodefrontend[J].IEEETransactionsonIndustryApplications,2004,40(6):1613-1620.
[13]LUHaifeng,QUWenlong,CHENGXiaomeng,etal.AnovelPWMtechniquewithtwo-phasemodulation[J].IEEETransactionsonPowerElectronics,2007,22(6):2403-2415.
Design of AC Induction Motor Controller for Vehicle Based on TSPWM
NI Rong-lai1, LI Jun-wei1,LU Hai-feng2, GAO Song1, Wang Dong3
(1.Shandong University of Technology,Zibo 255049,China;2.Tsinghua University,Beijing 100084,China;3.Beijing Qianqin Technology Development Co., Ltd.,Beijing 100084,China)
In view of the problem that the serious common mode voltage(CMV) of two level inverter for low speed electric vehicle, under the condition of not increasing the cost of hardware, an AC induction motor controller that reduced common mode voltage obviously for vehicle was designed, utilizing the novel PWM modulation method TSPWM(Tristate Space Pulse Width Modulation), combined with Infineon 32 bit microcontroller XMC4200. The new implementation method of TSPWM based on basic voltage vector action time and three-phase PWM duty cycle was proposed. The combination method of TSPWM and XMC4200 to generate the novel PWM signal was studied. The control algorithm and driver code was generated by Matlab/Simulink and Dave3 respectively. Experiment was conducted by loading the control code into the motor controller which considered XMC4200 as its core. The experiment shows that the CMV of motor controlled by TSPWM is lower, and the designed controller is implemented simply and has good control performance.
induction motor; common mode voltage; TSPWM; XMC4200; automatic code generation; experiment
2016-04-05
山东省自然科学基金项目(ZR2015EM054);山东省重点研发计划项目(2015GGX105009)
TM346
A
1004-7018(2016)10-0064-06
倪荣来(1990-),男,硕士研究生。