可穿戴式机械助力腿的研究与设计
2016-11-29安爱博
马 超,安爱博,王 浩
(辽宁工业大学 机械学院,锦州 121001)
可穿戴式机械助力腿的研究与设计
马 超,安爱博,王 浩
(辽宁工业大学 机械学院,锦州 121001)
提出了一种可穿戴式机械助力腿的设计方案与结构。该机械助力腿主要由铝合金型材和枢轴联接组成“类外骨骼”机架,由气缸、气泵、电磁阀完成动力输出,由单片机控制系统和气缸的磁环来完成自动控制,该装置结构简单、成本低廉、通用性好,具有一定的推广价值。
可穿戴式机械助力腿;“类外骨骼”机架;单片机
0 引言
下肢外骨骼是一种新型的具有可穿戴性能的机械装置,从人机一体化智能系统理论的观点出发,它是一种人主机辅的人机一体化系统[1]。这种技术在许多领域有着良好的应用前景,在军事领域,已开发出可用于单兵作战的外骨骼机器人,帮助提升士兵的载弹量和运动能力;在民用领域,可用于病人复健、旅游、救灾等等。
本文所研究的是一种结构简单、经济实用的可穿戴式机械助力腿,通过杆机构的设计,将受力点作用在机械腿上,可令使用者在操作过程中,尽可能的减少体力损耗,也能防止在工作过程中出现劳动损伤。该设计可应用于物流、医疗、军用、保健等多个行业,前景十分广阔。
1 可穿戴式机械助力腿的总体设计
1.1设计目的
目前已有的“助力机械”多采用电动或者液压装置作为动力机构,其造价昂贵,结构复杂,很多“助力机械”还需要加入价格不菲的检测设备,整体的造价很高,设备的维修、保养等也很困难,这就大大限制了其使用范围。目前此类设备多局限在军用、科研方面,在民用尤其是快递、物流运输方面的应用极少。因此,对“助力机械”的研究制作重点就是设计一种结构简单、价格低廉、操作方便、安全可靠的被动式机械,此外还应达到以下设计目标:
1)机构体积要尽可能的精巧,要节省空间,还应便于承载货物;
2)增大标准件、通用零件的使用率,减少非标零件的使用,从而减小采购的难度,降低制造、维修成本;
3)考虑到气动的功率限制,至少要设备能够提供0.5~1倍的助力功能;
4)“助力机械”与人体的接合要强调舒适性和安全性。
1.2总体设计方案
可穿戴式机械助力腿的方案如图1所示,主要由机械部分、动力部分、控制部分和安全绑带组成。
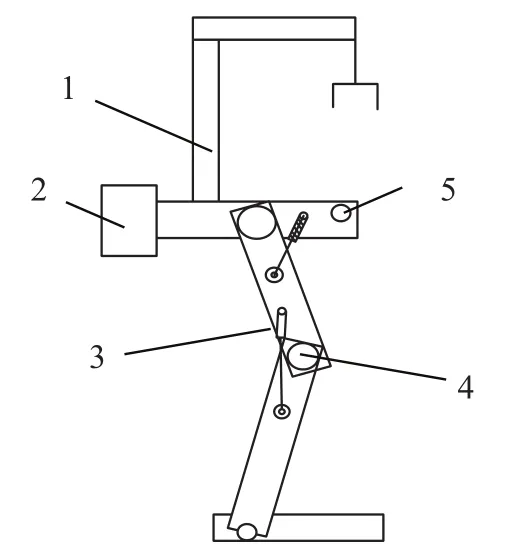
图1 可穿戴式机械助力腿方案简图
1)机械部分的机架主体全部由40×40铝合金型材联接而成,其结构简单、强度较高、通用性好。在髋部、膝部、踝部,由于需要形成相对转动,因此采用了铝合金枢轴来进行联接;
2)动力部分由大功率蓄电池、微型气泵、电磁阀和气缸组成。大功率蓄电池、微型气泵、电磁阀安装在机械腿髋部后方的支架上,气缸安装在机械腿的大腿部和小腿部,在气泵的带动下伸出或者缩回,从而带动使用者的腿部运动;
3)控制部分采用单片机作为控制器,通过手部的开关来完成程序的切换,通过气缸上的磁环来检测助力腿是否到达预定位置;
4)为了方便操作者的穿戴,在腰部设置了安全绑带,在腿部安装了粘扣。安全绑带和粘扣均可手动调节,身高在170cm~180cm之间,体重在55kg~80kg范围内的使用者均可视自身条件调节使用(如图2所示)。

图2 可穿戴式机械助力腿实物图
1.3工作原理
为了提升机械助力腿的功能,该机械助力腿设定了三个运行程序:直立、步行、登楼。通过在每个气缸的最短位置(完全缩回)、中间位置和最长位置(完全伸出)设置检测磁环,利用磁环检测的信号来完成程序的控制,其中中间位置的磁环可以根据使用者的身体状况进行调整。以步行状态为例,其工作过程如下:
1)电磁阀控制左腿上下气缸伸出,右腿上下气缸缩回;
2)当左腿气缸的无杆腔极限位置和右腿气缸的中间极限位置信号到位后切换程序;
3)右腿气缸伸出,左腿气缸缩回;
4)当右腿气缸的无杆腔极限位置和左腿气缸的中间极限位置信号到位后切换回原程序。
在上述程序的循环作用下,机械助力腿的左右两腿就可以完成交替的伸缩,从而模拟人类行走的步态。登楼状态的程序控制方案与步行基本相同,仅是将中间位极限信号更改为有杆腔极限位置信号。直立状态为程序的初始状态,单片机接通电源后,所有气缸均完全伸出,从而保持直立状态。
2 结构设计
2.1气缸联接件的设计
气缸联接件的主要作用是将气缸的两个端部固定在铝合金型材上。一端与气缸的Y型接头联接,另一端要与气缸的尾孔联接,另外还要考虑要在此处形成转动副以及防止结构的干涉等因素。因此在设计中采用阶梯设计,并在底部制作长条孔,用普通螺栓配T型螺母进行联接;在中心采用螺纹孔配塞打螺丝来形成转动副。
2.2枢轴的设计
枢轴是机械腿能够形成转动联接的重要零件,在原设计中,枢轴底部设计为一个平面,与型材的端面直接接触,这就形成两个平面接触而无周向定位,枢轴由于预紧不够或联接螺栓松动就会转动失效;枢轴的转动副完全由螺栓杆和枢轴孔的间隙配合形成,螺栓一方面要承受载荷造成的剪切力,另一方面又要承受转动而造成的磨损,降低了螺栓的强度。在改进设计中(如图3所示),枢轴的底面增加了定位止口,与型材截面的槽口形成稳定的周向定位;联接螺栓拧紧在下方枢轴的螺纹孔中,安装在上方枢轴的轴承上,以形成转动副。这样的设计减小了螺栓转动中造成的磨损,经实验证明,这种结构设计更稳定也更可靠。

图3 枢轴结构示意图
2.3零件的装配
采用SolidWorks三维实体建模软件,完成了各个零件的结构设计并采用自下而上的装配方式,完成机械助力腿的整机装配,装配效果如图4所示。

图4 可穿戴式机械助力腿装配图
【】【】
3 设计中存在的不足
1)采用的微型气泵功率较小,助力能力有限;
2)枢轴只能完成平面转动,空间转动能力较弱,在使用时需要操作者自身对机构的平衡性进行调整;
3)可增加上肢助力设计,拓展功能。
4 结束语
设计了一种实用、便利、高效的被动式机械腿助力机构,该助力腿采用铝合金型材作为机架,结构简单、制造成本低、互换性好。该机构以气泵为动力源,用气缸带动机械腿完成各种动作。使用者可根据自身的条件调整安全绑带的位置、松紧,进行适应性调节,使用方面,运行可靠,能够在连续前进过程中实现机械助力。在2015年辽宁省普通高等学校本科大学生机械创新设计大赛中,该机构获得一等奖。
[1] 陈鹰,杨灿军.人机智能系统理论与方法[M].杭州:浙江大学出版社,2006.
[2] 孙 桓.机械原理[M].西安:高等教育出版社,2006.
[3] 濮良贵.机械设计[M].西安:高等教育出版社,2006.
[4] 机械设计手册编委会.机械设计手册[M].北京:机械工业出版社,2005.
Research and design for wearable mechanical legs
MA Chao, AN Ai-bo, WANG Hao
TH122
B
1009-0134(2016)02-0145-02
2015-12-09
辽宁省普通高等教育本科教学改革研究一般项目(UPRP20140724)
马超(1981 -),男,辽宁朝阳人,讲师,硕士,研究方向为机械设计。