前桥摆转转向式四轮底盘液压驱动系统方案优化设计的研究
2016-11-29李志伟
吕 莹,张 静,吴 潇,李志伟,
(1.罗定职业技术学院,云浮 527200;2.华南农业大学,广州 510642)
前桥摆转转向式四轮底盘液压驱动系统方案优化设计的研究
吕 莹1,张 静2,吴 潇2,李志伟1,2
(1.罗定职业技术学院,云浮 527200;2.华南农业大学,广州 510642)
前桥摆转四轮底盘是一种可实现小转弯半径的底盘。在转向时,通过控制前桥驱动轮的转动,使前驱动桥主动围绕着转向装置转动,可以带动底盘以任意角度转向。根据摆转式四轮底盘的功能要求确定了行走开式液压系统的技术方案, 针对摆转式四轮底盘的前轮差速转向的特性提出了走开式液压系统的主要功能模块,进而得出适合前桥摆转转向底盘的前轮的控制方式,为后续的摆转式四轮底盘液压系统设计计算方法和元件选型计算过程提供依据。
四轮底盘;转向;前桥摆转式;液压驱动
0 引言
前轮偏转转向的拖拉机在松软土地和水田中转向困难是一种普遍存在的难题[1~5]。因此,很多拖拉机制造企业和研究人员都在致力研究减少转向操纵力和减小转弯半径的两个转向问题。为了改善拖拉机转向和操作方式,提高作业效率和使用安全性,提出了前桥摆转转向式四轮底盘的一种设计方案。根据前期的研究为了实现前桥摆转转向式四轮底盘的行走要求,本文通过对不同方案的分析,得出适合前桥摆转转向底盘前轮的动力传动方式及设计方案。
1 前桥摆转转向底盘的转向机理分析
1.1四轮底盘的行走工作要求
四轮底盘在设计功能上要满足直行,左转弯、右转弯、倒退以及一定的调速范围等基本要求,现今在实际生产上所使用的轮式底盘一般都适合在大中型地块中作业,而我国南方大部分地区的地块主要均为小面积地块,在这样的地块作业时轮式底盘不易转弯,作业时间率较低,为此需要设计能够在小地块旱地或水田中进行作业同时具有轻型、打滑率低、不雍泥雍水、转弯半径小等特点的农机底盘。
1.2前桥摆转四轮底盘的机理分析
为了研究主要在小地块旱地或水田作业,并具能够进行倒U型转弯模式如图1所示的作业方式的四轮底盘。需要设计一种高效率转向的四轮行走底盘,而关键就是要解决转弯半径的问题,即转弯半径小。最理想的转弯半径是底盘宽度的一半,即转动方向一边的轮子的转速应该是零。这样底盘车架转弯的时候其前桥的外侧轮就会围绕内测轮转动,而内测轮是原地转动。并且能够原地连续转动180°。此种底盘在水田作业时,由于行走轮陷入土壤中一定深度,可免除前轮偏转转向方式存在的转向力的问题。结合以上对四轮底盘作业等方面的要求,本课题组设计了前桥摆转转向四轮底盘。其结构如图2所示。摆转式四轮底盘由两个前驱动轮、转向桥、机架以及安装在机架上的两个后轮(随动轮)构成。其中,转向桥包括直接与两前轮相连接的前横梁,固定在前横梁上的转向机构组成。转向时,一个前轮停止行走,另一个前轮继续行走带动前桥绕停转的前轮转动,同时通过前桥中部与车架的连接铰链带动车架转向。设计车架时,确保前桥的中心可作任意角度的转动,同时还具有横向浮动功能,就能确保底盘的四个轮子均能同时着地,实现四轮底盘在小地块中能以小的转弯半径、小的地头宽度进行轻便和灵活转向。前桥摆转转向底盘以液压驱动代替了传统的机械式传动方式[7~9],并且取消了繁琐的机械式转向操纵机构。两个液压马达分别直接与底盘的两前轮连接,将行走动力输入两个驱动轮,实现底盘的前进后退和转向,两边的行走轮可同时进行正反转或一边停转,一边正反转,实现转弯动作。
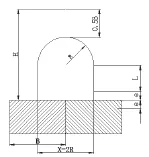
图1 倒U型转弯模式
图中:E为地头宽度,B为底盘轮距,L为底盘轴距,X为两个工作行程间的距离,R为转弯半径,e为农机具到轮轴的距离。

图2 底盘结构原理简图
2 转向机理及其液压系统设计
2.1底盘行走液压系统设计方案一
根据底盘的行走及转向方式的独特要求,此套液压系统中,两个行走马达是以串联的形式接入油路,并且由同一个液压马达供油。由于闭式液压系统中一泵只向一个液压执行元件供油,而开式液压系统中一泵可以向多个液压执行元件供油,所以,本文采用开式液压系统的方案[10]。其原理图如图3所示。
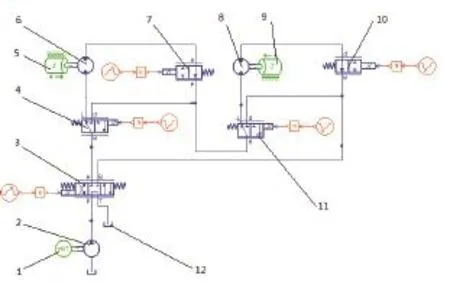
图3 底盘行走的液压系统
本套液压系统的主要部件包括定量液压油泵2、电磁换向阀3,4,7,10,11和摆线液压马达6,10。其中摆线液压马达能够在底盘低速行驶下提供足够大的驱动力矩,齿轮泵作为液压系统的动力元件。当发动机启动后,油泵开始为液压系统供油,通过控制电磁阀组的工作位置来制定底盘的行走状态。底盘行走工况与阀的工作位置关系如表1所示。

表1 方案一底盘行走工况与阀的工作位置关系
在执行左转弯操作时,三位四通换向阀3打开,并且需将图中两位三通阀4与电磁开关阀7视为一个工作阀组,即同时吸合或断开电磁铁。如此才能使底盘在进行左转向时,左轮能够保持停止状态,不会因为行走过程的惯性继续向前行走。右转弯的动作原理与左转弯相同。
2.2两前行走轮液压系统设计方案二
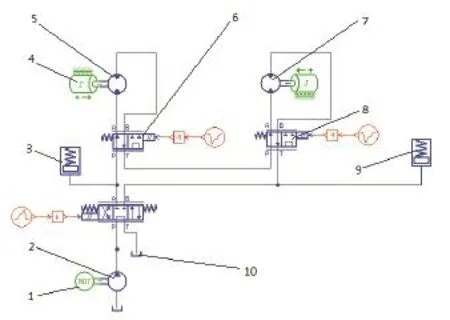
图4 行走液压系统原理图
本套液压系统的主要部件包括定量液压油泵2、电磁换向阀6,8、缓冲油缸3,9和摆线液压马达。本套液压油路与方案一的区别在于采用两个相同的两位四通阀6代替了方案一中的4、7组成的阀组的工作形式,并且在两个马达进油路和回油路上分别装有缓冲油缸3,9。底盘行走工况与阀的工作位置关系如表2所示。
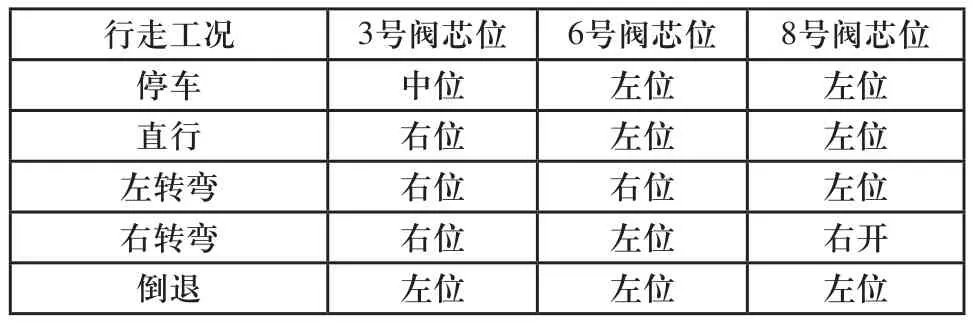
表2 方案二底盘行走工况与阀的工作位置关系
【】【】
同样,以底盘进行左转弯工况来分析。在执行左转弯操作时,三位四通换向阀打开,电磁阀6处于右位,以切断马达5的供油使左轮停止转动,电磁阀8处于左位,马达7得以继续转动以达到左转向的目的。
2.3行走轮液压系统方案
方案一与方案二均采用了马达串联式油路连接方案。液压马达串联系统的功能是,可以通过控制电磁阀的工作位置来分配马达的动力。当两个马达同时接入油路时,两驱动轮同时转动,带动底盘直线行走;当切断一侧马达的动力时,亦即使一侧马达接入油路,另一侧马达停止接入油路,即可实现底盘绕一侧轮子转动,达到转向的目的。方案二与方案一的区别在于使用电磁阀6代替了方案一中的4、7组成的工作阀组,减少了系统液压阀数量。液压阀数目的减少能够提高系统动作响应速度,降低系统的压力损失,缓冲油缸的作用是能够降低底盘在启动和制动过程中产生的压力冲击。因此,通过对比,底盘的行走液压系统采用方案二的原理。
2.4试验验证

图5 试验样机
1)通过对自行组装的试验样机进行实验,得出样机的性能参数如下:整机自重:350kg,外形尺寸(长×宽×高)1440×1440×900mm,行走速度1~15km·h-1,最大驱动扭矩450N·m,最小转弯半径(相对前桥中心)0mm。
2)液压系统可实现底盘的前行、转弯、后退功能,并能够达到前桥摆转式转向的转弯方式。
3)底盘在进行地头掉转时大大简化了转向操作,在掉头时所需地头长度最小为2200mm,掉头时间为7.2s~11.8s,电磁阀动作时间小于100ms时,转向过程平稳。底盘在行走速度越快,底盘所需转弯时间越短。
3 结束语
前桥摆转式转向系统通过采用前桥中部通过垂直转轴与纵向水平转轴相结合的结构设计方案,可确保前桥绕垂直转轴作任意角度的转动,同时前桥在水平方向作一定角度的浮动,确保四轮能够同时着地;通过对前桥摆转底盘行走轮液压控制系统的优化,为摆转式四轮底盘液压系统设计计算方法和元件选型优化计算提供依据。
[1] 冯启高,毛罕平.我国农业机械化发展现状及对策.农机化研究[J].2010,2:245-247.
[2] 刘有贵.轮式拖拉机转向困难的原因[J].湖南农机.2003,05(30).
[3] 徐志坚,宋艳琪.对小型轮式拖拉机发展前景的思考.农业装备[J],2008:24-26.
[4] 陈香香.水旱轮作区现代化田间工程模式研究[D].扬州大学,2005.
[5] 陈济勤.农业机器运用管理学(第二版)[M].北京:中国农业出版社,1995:15-35.
[6] 张扬.铰接撞在机转向系统动力学分析与研究[D].吉林:吉林大学,2006.
[7] 吕莹,吴潇,符耀明,李志伟.四轮底盘转向方式对工作行程率影响的研究[J].农机化研究,2015,5:71-74.
[8] 曾爱平,邱秀丽,赵娜,李志伟.液压后驱式轻型农机水田自走底盘的设计[J].农机化研究.2010,7:149-151,159.
[9] 吕莹,吴潇,符耀明,李志伟.前桥摆转转向式四驱底盘结构形状指数的优化[J].农机化研究.2015,6:33-36.
[10] 韩慧仙,曹显利,刘茂福.全液压起重机行走液压系统设计[C]. PEITS 2010.(512-515).
[11] Wang guo-ye,liu zhao-du,ma yue-feng,et al. Reasearch on bispeed front Axle of four-wheel drive tractor[J].Agricultural Engineering International, 2011, 13(3):56-58.
[12] S.Kim, K.Park, H.J.Song, Y. K. HWang, S. J. Moon, H. S. Ahn and M.Tomizuka. Development of control logic for hydraulic active roll control system[J].International Journal of Automotive Technology,2012,(13):87-95.
Research on the hydraulic system design of front axle swing sowing four-wheel chassis
LYU Ying1, ZHANG Jing2, WU Xiao2, LI Zhi-wei1,2
TH12
A
1009-0134(2016)02-0132-03
2015-11-13
吕莹(1982 -),女,辽宁本溪人,讲师,博士,研究方向为农业机械装备及设施。
