基于电液伺服系统的多绳缠绕式提升机浮动天轮主动调绳性能研究
2016-08-09景月帅李济顺邹声勇薛玉君
马 伟 景月帅 李济顺, 邹声勇 薛玉君 杨 芳
1.河南科技大学河南省机械设计与传动系统重点实验室,洛阳,4710032.洛阳矿山机械工程设计研究院矿山重型装备国家重点实验室,洛阳,471039
基于电液伺服系统的多绳缠绕式提升机浮动天轮主动调绳性能研究
马伟1景月帅1李济顺1,2邹声勇2薛玉君1杨芳1
1.河南科技大学河南省机械设计与传动系统重点实验室,洛阳,4710032.洛阳矿山机械工程设计研究院矿山重型装备国家重点实验室,洛阳,471039
摘要:在多绳缠绕式超深矿井提升机运行过程中,采用基于电液伺服系统的浮动天轮主动调绳装置,调节钢丝绳的张力。根据浮动天轮主动调绳装置的结构和原理建立阀控缸液压伺服系统的数学模型,设计了电液伺服系统的模糊自适应PID控制器,提出了一种基于模糊自适应PID控制的电液伺服系统实现浮动天轮主动调绳的控制方法,并建立了相应的数字仿真模型,以不同扰动频率的正弦函数输入模拟钢丝绳的振动,分析了液压缸的动态特性。仿真结果证明了采用模糊自适应PID控制方法的电液伺服系统浮动天轮主动调绳装置的有效性。
关键词:浮动天轮;动态特性;提升机;模糊自适应PID控制
0引言
矿井提升机是一种大型提升设备,在多绳提升机运行过程中,存在一定钢丝绳张力差,主要原因有:绳槽直径存在一定的偏差,绳槽深的钢丝绳,钢丝绳张力较小;钢丝绳的弹性模量和直径存在一定的误差,弹性模量的不同和直径的差异会导致钢丝绳张力不一致;钢丝绳安装时初始长度不等引起钢丝绳伸长量不同,导致钢丝绳张力不一致。钢丝绳张力不平衡将加剧摩擦衬垫磨损和引起钢丝绳的振动,造成提升机系统运行不稳定,导致罐笼倾斜,甚至断绳等重大安全事故[1-2]。中国矿业大学研制了YXZ型钢丝绳张力平衡装置,但由于钢丝绳的蠕动和相对滑动,引起调绳装置出现偏窜,造成悬挂平衡装置油缸活塞杆外伸到极限,另一端活塞杆内缩到极限,将无法正常调绳。后来采用无源密闭连通原理解决了以上问题,但要对调绳装置定期打压调绳。瑞典ABB公司设计发明了钢丝绳张力自平衡装置。德国 GHH 公司开发了垫块式的液压调绳装置,这种调绳装置需要提升系统停止工作来调节钢丝绳张力[3-5]。
多绳缠绕式超深矿井提升机的提升高度可达1500 m以上,一次载重量可达240 t以上[6],而张力自平衡装置位于罐笼与钢丝绳连接处,不仅增加了提升负担,而且其调绳范围有限,不适用于超深矿井。本文提出采用PID控制和模糊控制相结合,构造一个适应于大滞后、非线性和时变系统,并能克服外界对系统的扰动的模糊自适应PID控制的在线调整主动调绳装置。针对超深矿井提升机存在张力不平衡的问题,通过对两根钢丝绳的缠绕式提升机匀速下降时的主动调绳过程进行分析,研究不同扰动频率下采用不同控制方法进行主动调绳时液压缸的动态特性和响应规律。
1基于电液伺服系统的浮动天轮主动调绳原理
浮动天轮主动调绳装置的液压系统原理如图1所示,由电动机带动液压泵,油液通过过滤器,压力油经过电液伺服阀并联驱动液压缸;电液伺服阀输入电信号,罐笼和钢丝绳间的压力传感器检测钢丝绳的受力情况,实时传递输出力信号;根据传感器检测信号,反馈系统实时调节两个电液伺服阀的输入电信号以调节阀芯位移,从而控制液压缸活塞杆位移的方向和大小,使钢丝绳的张力保持平衡。
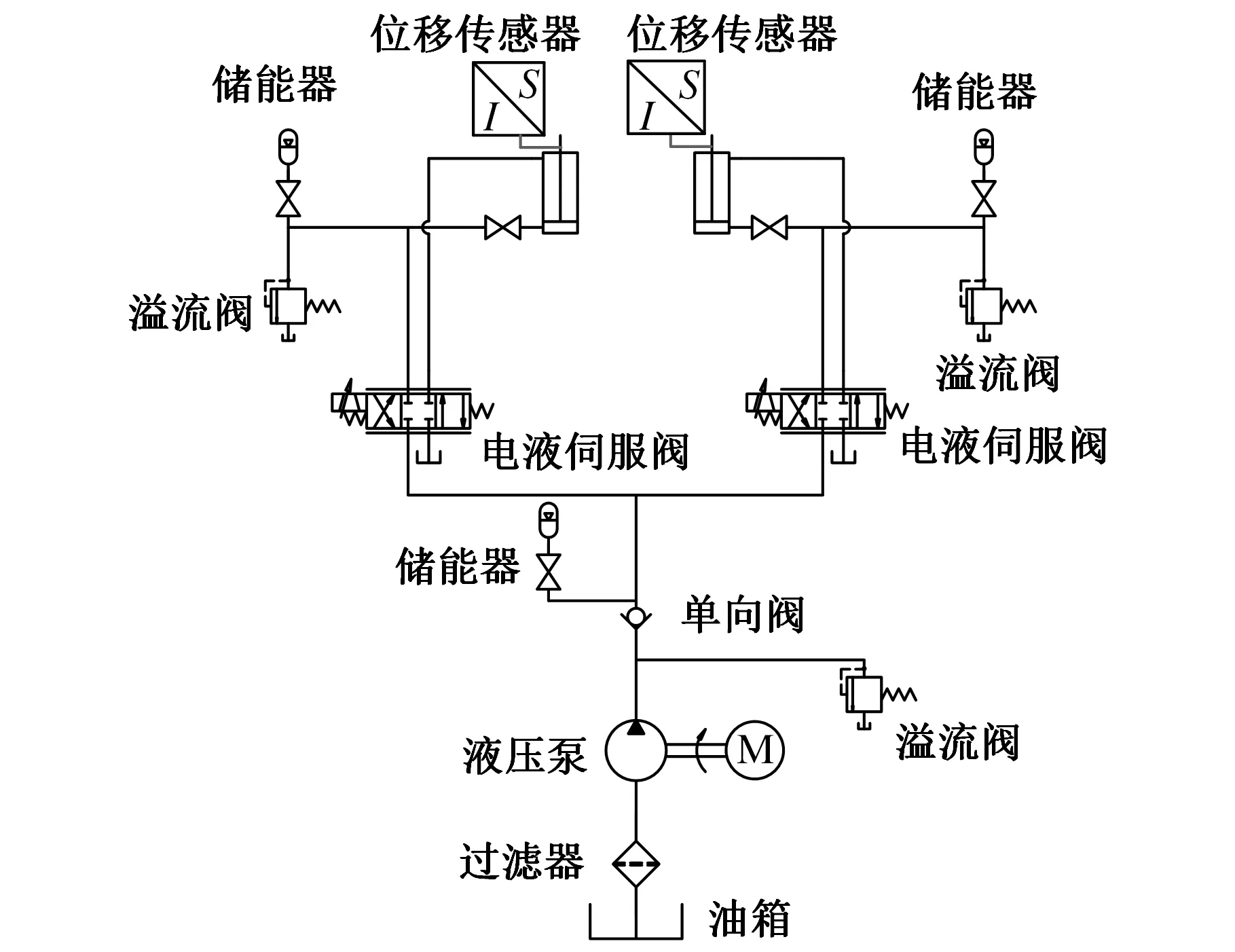
图1 浮动天轮液压系统原理图
浮动天轮主动调绳装置结构如图2所示,主要由电液伺服系统、浮动天轮、浮动天轮U形架、直线轨道和相应的承力结构等组成,油缸动态运动行程为100 mm。液压缸上端与U形支架采用螺纹连接,下端与底座采用铰接,设置锁定结构装置,电液伺服系统通过控制两缸容腔的流量使浮动天轮在直线滑轨上运动,来调节钢丝绳张力。
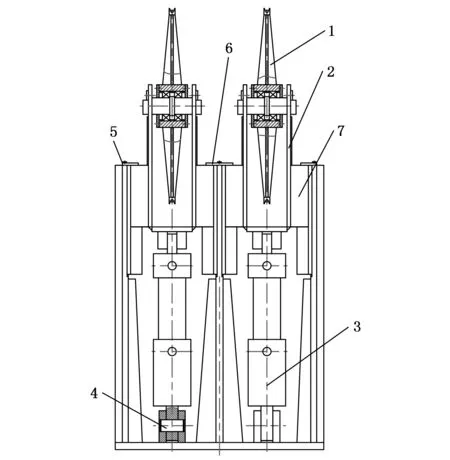
1.浮动天轮 2.U形架 3.液压缸 4.圆柱销 5.压板1 6.压板2 7.直线滑轨图2 浮动天轮主动调绳结构
2电液伺服系统数学模型的建立
假定流体是不可压缩的,连接管道短且粗,容腔弹性模量和油液温度是常数;液压缸的泄漏视为层流流动;伺服阀是零开口的四边滑阀,节流口视为对称匹配的,供油压力恒定不变,回油压力为零;阀压降和阀芯位移变化导致的流量变化瞬间发生;忽略管道的流体质量;每个液压缸工作的容腔压力都相等,则阀芯位移xv>0时压力-流量方程[7]为
(1)
阀芯位移xv<0时压力-流量方程为
(2)
式中,qV1、qV2分别为进入有杆腔容腔体积流量和流出无杆腔容腔体积流量;w为阀节流口的面积梯度;cd为流量系数;ρ为油液密度;ps为油源压力;p1、p2分别是有杆腔和无杆腔压力。
阀的线性化方程为
qVL=Kqαxv-KcαpL
(3)
式中,Kcα为流量压力系数;pL0为平衡点处的压力;Kqα为流量增益;xv0为平衡点处的阀芯位移;n=A2/A1;A1、A2分别为液压缸有杆和无杆腔面积;qVL为负载流量;负载压力pL=p1-p2。
液压系统流量连续方程[8]为
(4)
式中,βe油液等效弹性模量;y为活塞杆的位移;cic和cec分别为液压缸的内外泄漏系数;V1和V2分别为液压缸有杆和无杆腔体积,V1=V10+A1y,V2=Ve-(V10+A2y);V10为平衡位置时的无杆腔容积;Ve为液压缸有效容积。
力平衡方程[9]为
(5)
式中,m为活塞和负载等效质量;Bc为负载与活塞黏性阻尼系数;k为负载弹簧刚度;fe为活塞上等效外负载力。
(6)
式中,Ve为有效容积;V=A1L,L为液压缸最大行程;Ap为等效面积;Ktα为总流量的压力系数;Am为等效平均面积;ωh为液压固有频率;ξh为液压阻尼比。
由以上等式,采用PID控制建立电液伺服控制系统,其方框图见图3,其中kf为传感器增益。
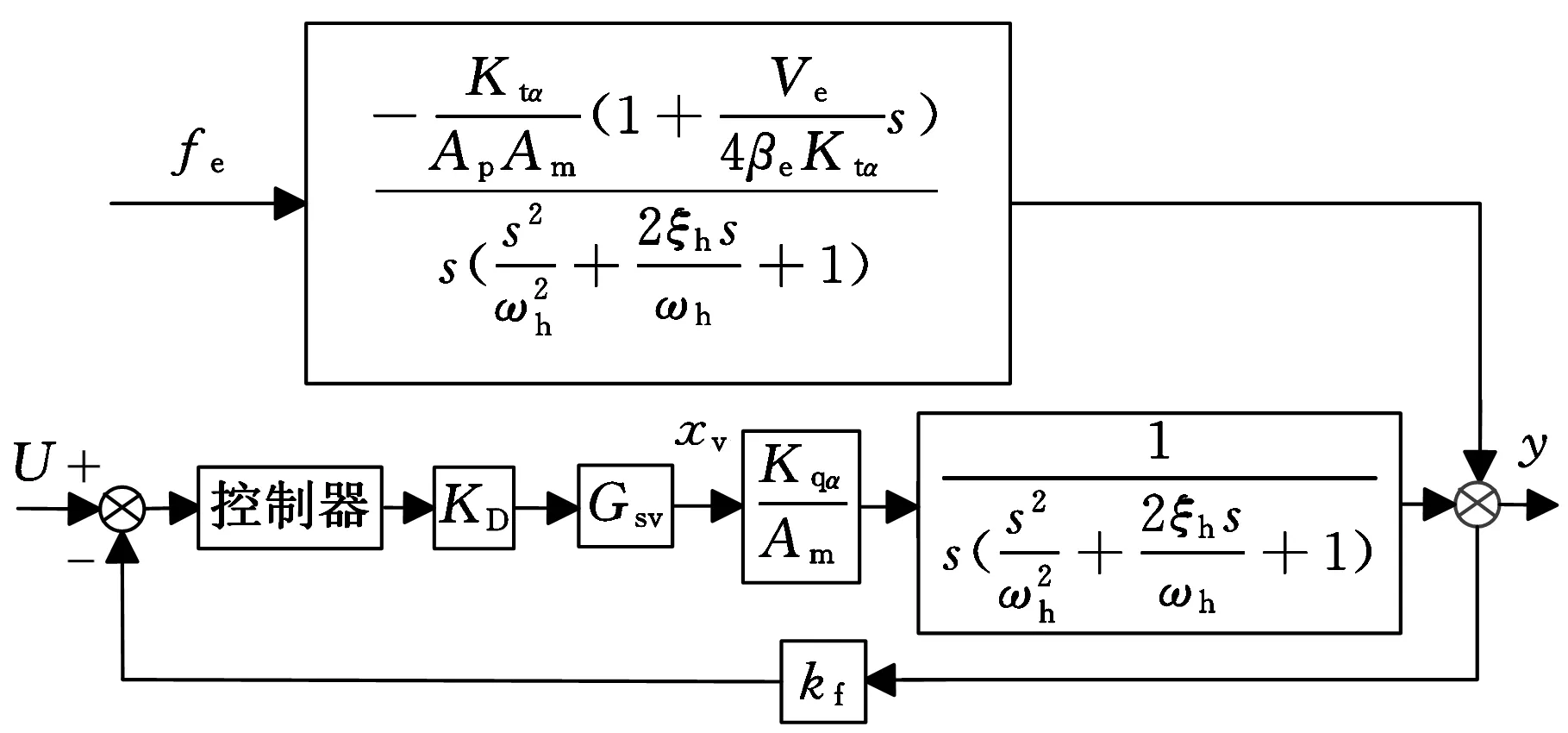
图3 控制系统方框图
3电液伺服系统调绳控制策略设计

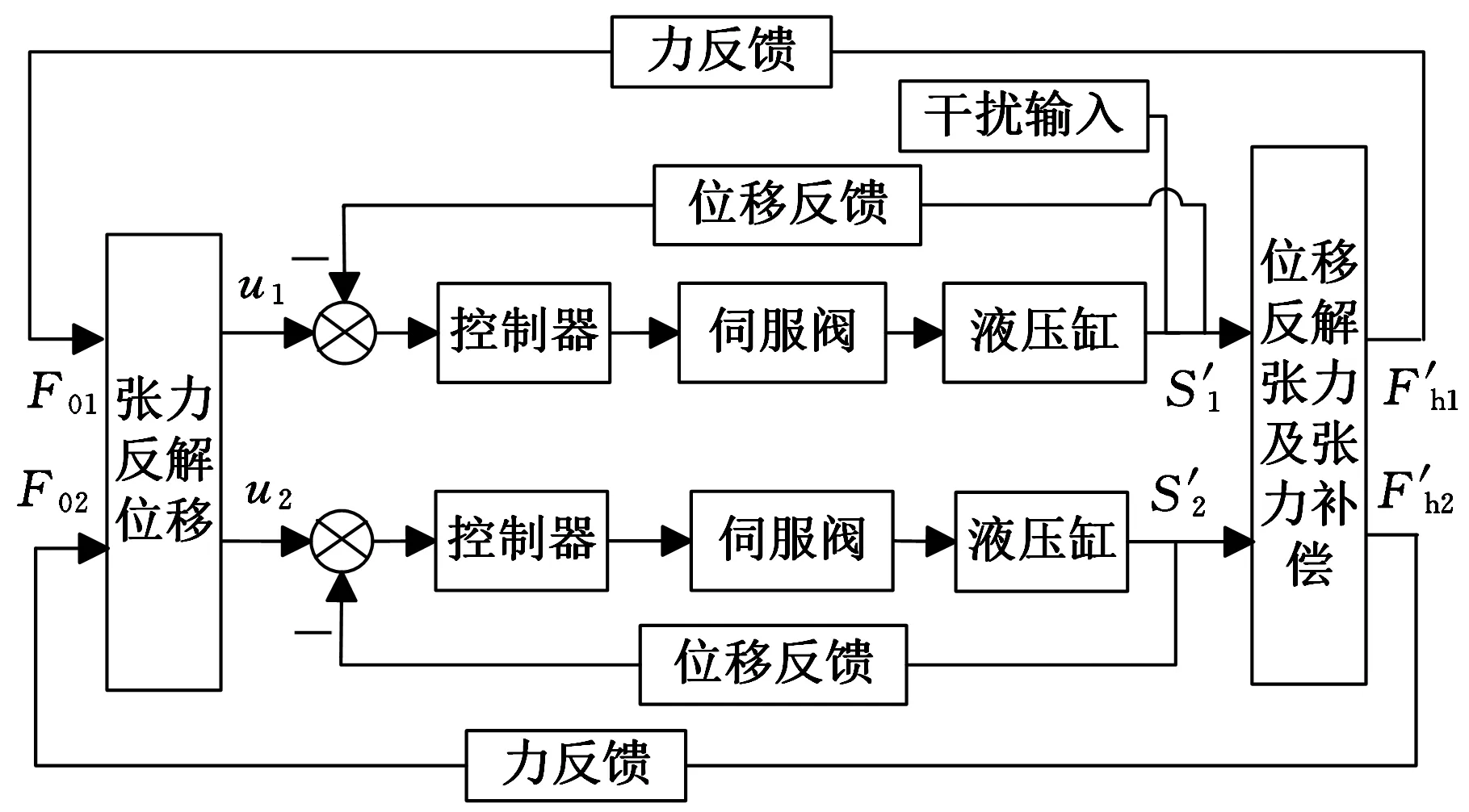
图4 浮动天轮主动调绳系统框图
4模糊自适应PID控制器的设计
4.1控制系统原理
本文提出的控制器采用的是二输入三输出的曼丹尼推理算法,如图5所示,e为液压缸输出位移与输入值的差值,ec为液压缸位移差变化率,ΔkP、ΔkI、ΔkD分别是模糊自适应PID修正量,按照控制规则能够实现任意时刻PID参数的在线修正,能够使阀控缸有较好的动静态性能[10-12]。
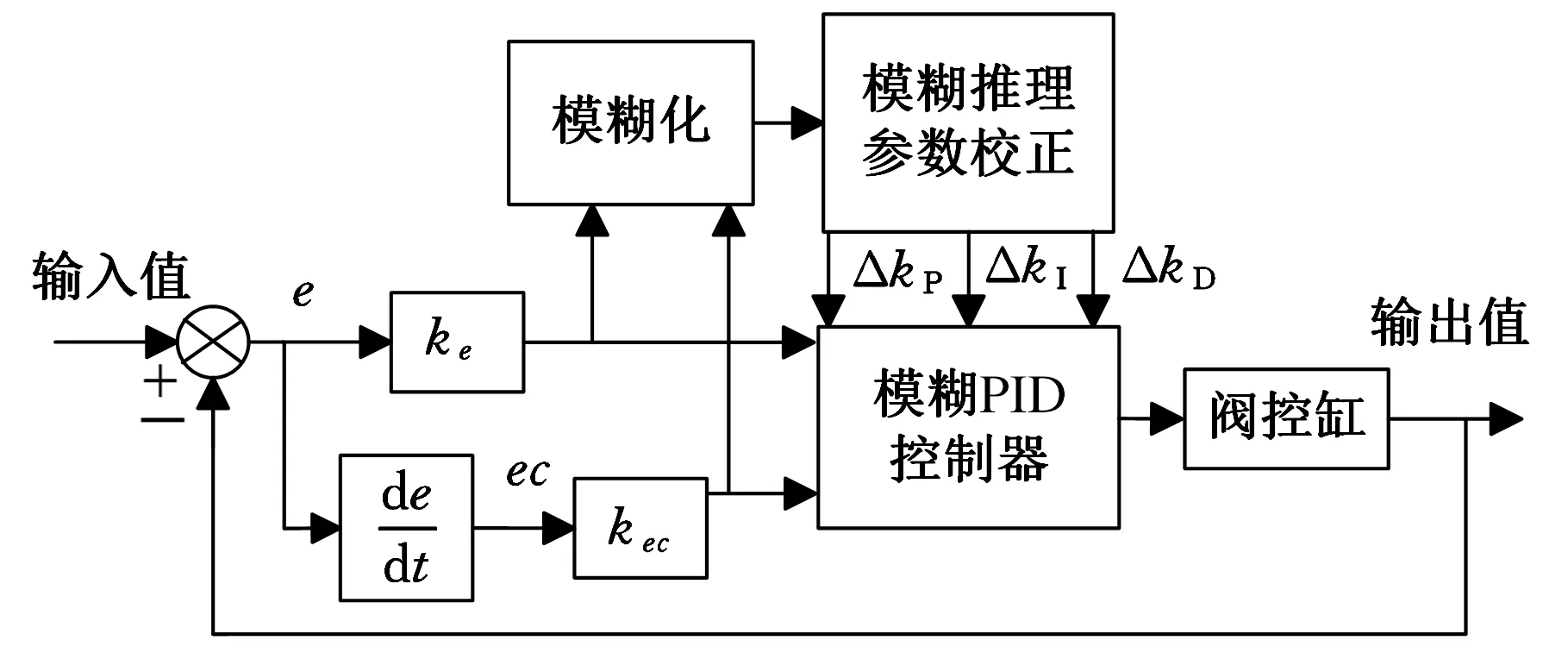
图5 模糊自适应PID控制器结构图
模糊自适应PID控制器工作过程中,实时对模糊逻辑规则的数据进行处理、查表和计算,实时调整修正PID参数。其工作流程如图6所示,其中k为采样序数。
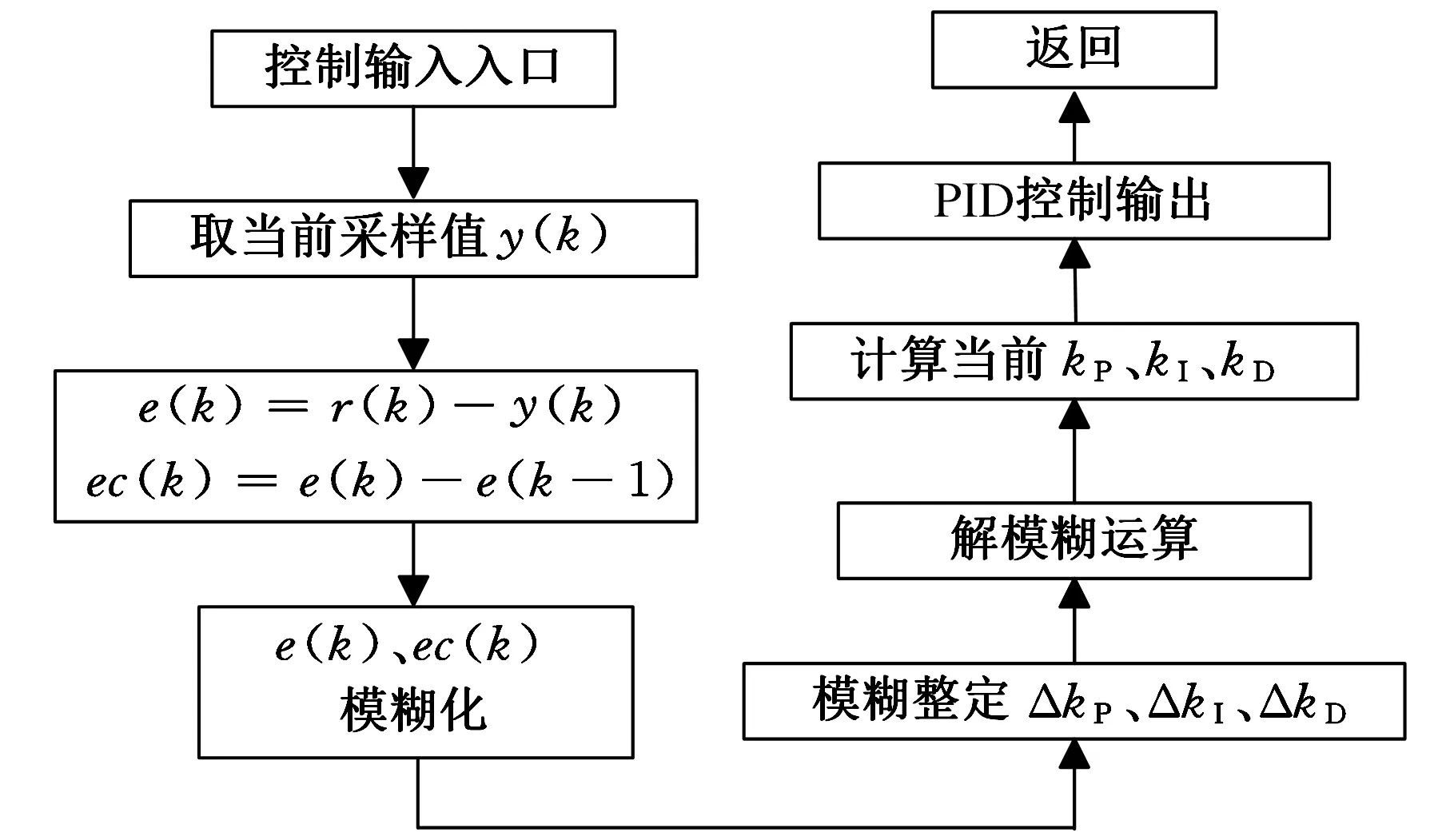
图6 模糊自适应PID控制器工作流程图
4.2确定控制器模糊集
模糊自适应PID控制器算法为
(7)
(8)
选取阀控缸位移与输入值的差值e和阀控缸响应速度与输入值的差值ec作为模糊控制器的输入变量,输出电信号作为输出变量。输入和输出变量采用梯形与三角形函数。根据液压缸的调节行程确定e、ec、ΔkP、ΔkI、ΔkD的论域均为[-3,3],模糊集均为{NB,NM,NS,T,PS,PM,PB}。e的基本论域为[-0.02,0.02],当液压缸位移偏差超过此范围时,控制系统发出警告。ec的基本论域为[-0.05 0.05],ΔkP基本论域为[-3,3]、ΔkI基本论域为[-0.3,0.3],ΔkD基本论域为[-0.06,0.06]。e隶属函数曲线见图7,ec隶属函数曲线与图7相同。
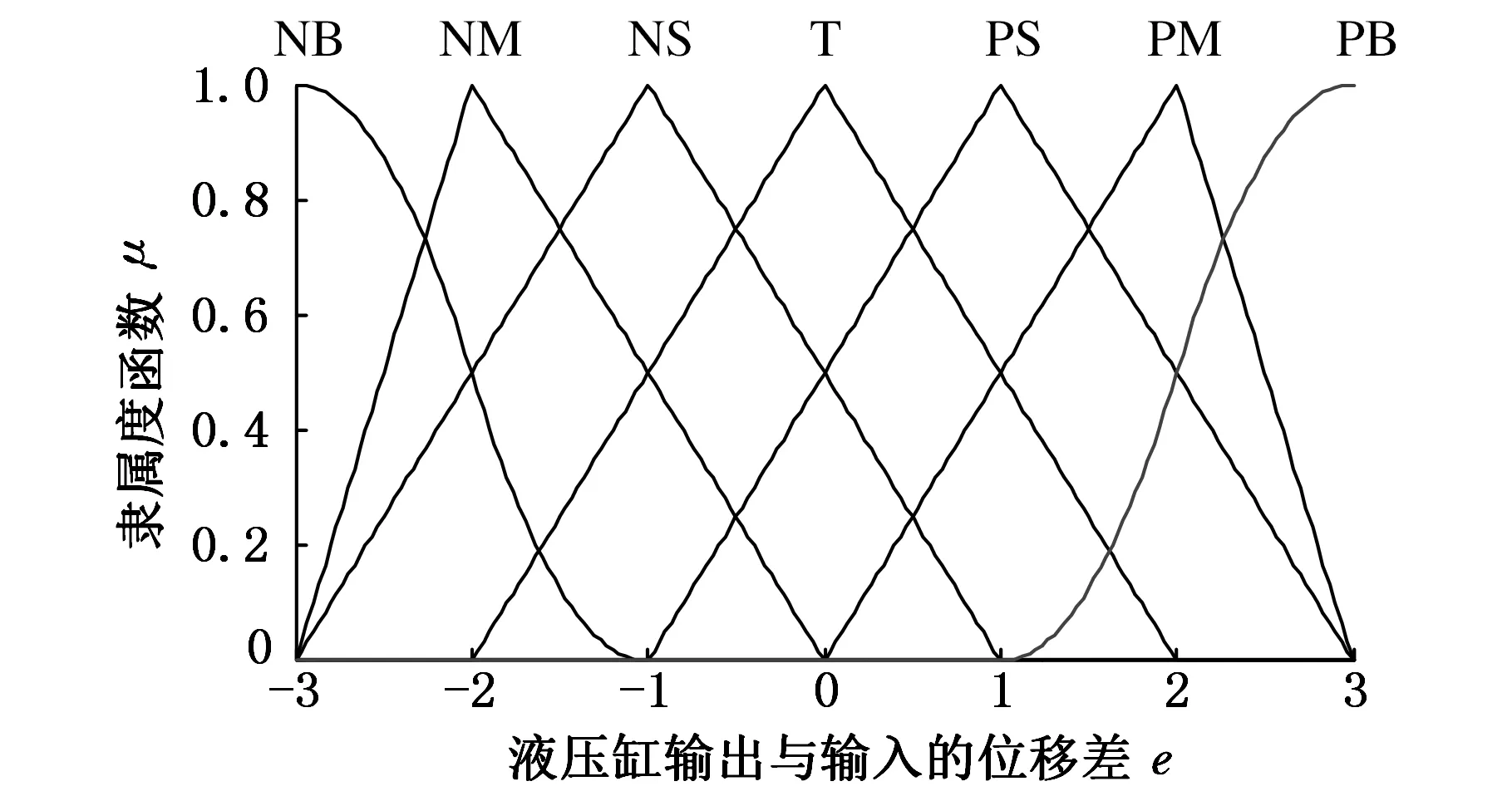
图7 e隶属函数曲线
4.3模糊控制规则及去模糊化
根据图5模糊自适应PID控制结构可知,自适应模糊控制器以e、ec作为输入,以ΔkP、ΔkI、ΔkD作为输出来调节kP、kI、kD,由kP、kI、kD调整规律形成模糊控制规则。模糊自适应PID控制规律如下:
(1)模糊自适应控制系统|e|较大时,为了获得较快的响应速度且防止|e|瞬时过大造成微分饱和,引起控制系统过大的超调,通常选取kI=0和较大的kP、较小的kD。
(2)模糊自适应控制系统|e|和|ec|正常大小时,为了确保控制系统的响应速度,避免控制系统的过大超调量,kP应选取较小值,kI、kD应选取合适的值。
(3)模糊自适应控制系统|e|较小时,为了保证控制系统稳定,避免控制系统抗干扰性较差并出现振荡,kI、kD应适当选取。|ec|表征了控制系统的偏差,由|ec|值的大小选取适当的kP、kI、kD。
根据以上规律得出模糊自适应PID控制系统的e、ec与ΔkP、ΔkI、ΔkD存在模糊推理的关系,如表1~表3所示。通过实时在线调节PID参数,使电液伺服系统有较好的调绳能力。
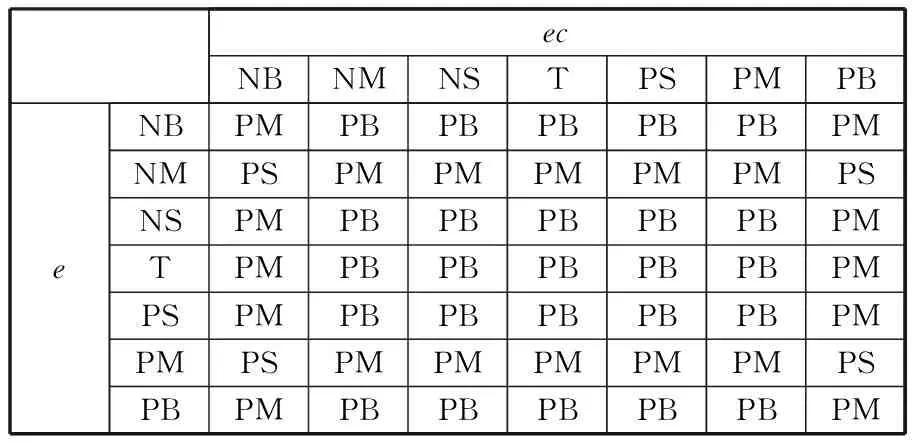
表1 ΔkP模糊控制规则表
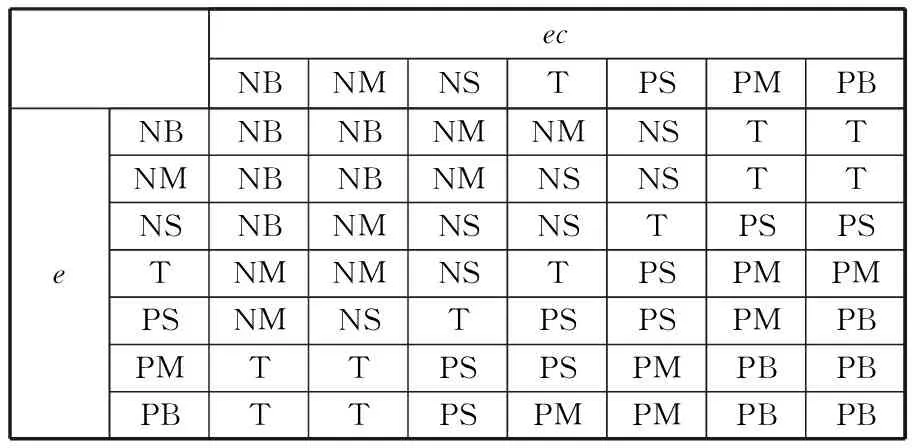
表2 ΔkI模糊控制规则表
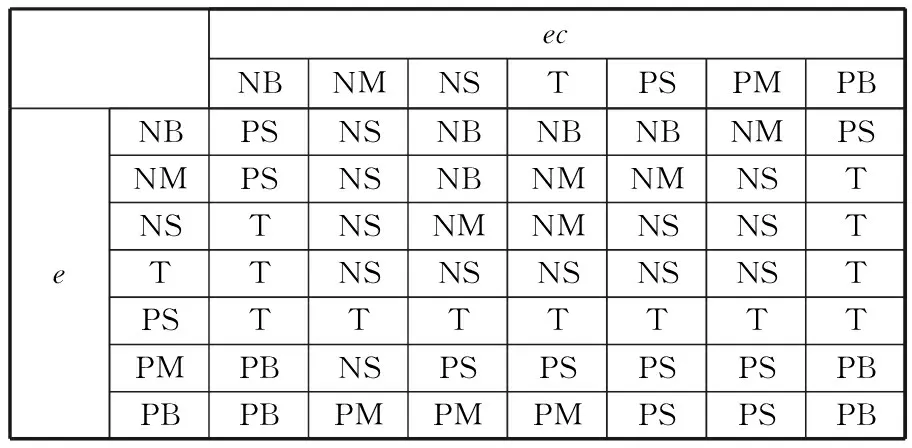
表3 ΔkD模糊控制规则表
由以上规则经过模糊化、模糊推理参数校正,获得精确的液压缸输出位移量,模糊控制系统采用重心法去模糊化。
5电液伺服系统性能仿真分析
5.1仿真条件及参数
假设卷筒直径6 m,并以18 m/s的速度运行。提升系统通过干扰输入给定幅值为0.5 m,频率分别为0.01 Hz、0.1 Hz、1 Hz的正弦函数来模拟钢丝绳振动对绳长变化的影响及对钢丝绳张力差的影响,通过液压缸活塞杆位移变化实现浮动天轮主动调绳。采用普通PID控制与模糊自适应PID控制器的电液伺服系统分析液压缸的动态性能[13],在MATLAB/Simulink中建立仿真模型,验证采用模糊自适应PID控制方法的电液伺服系统浮动天轮调绳装置是否有效。仿真参数见表4[14],仿真结果如图8~图11所示。
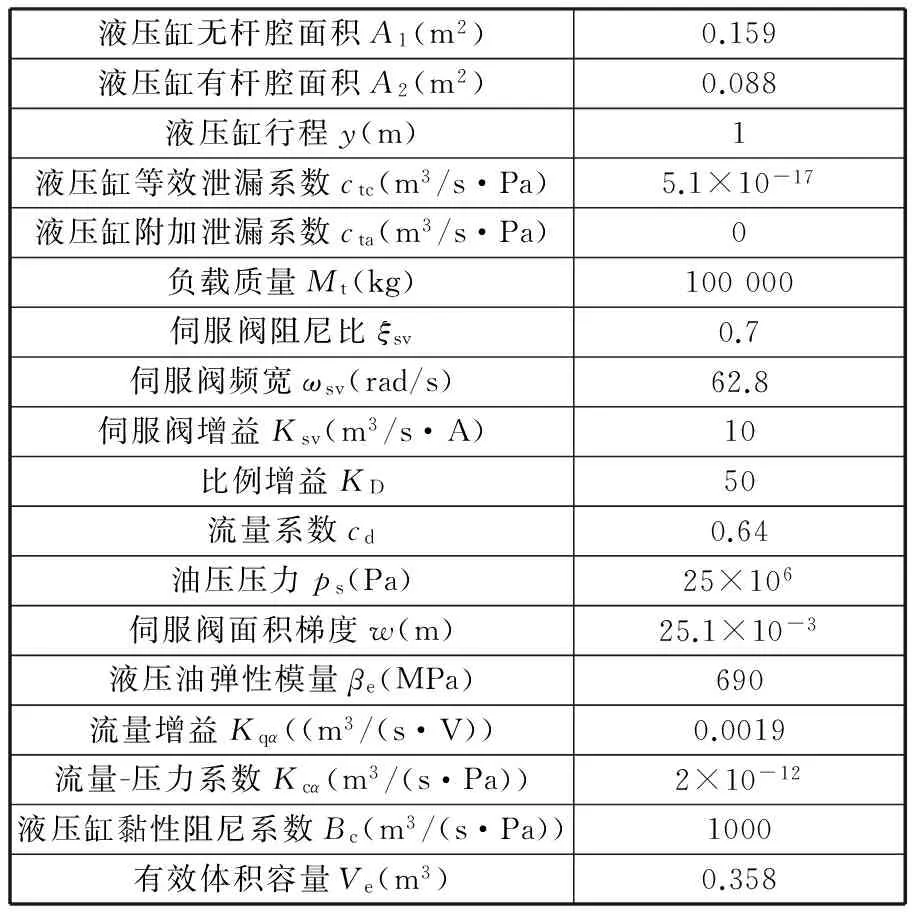
表4 液压系统主要参数[14]
5.2钢丝绳不同扰动频率对液压缸动态特性的影响
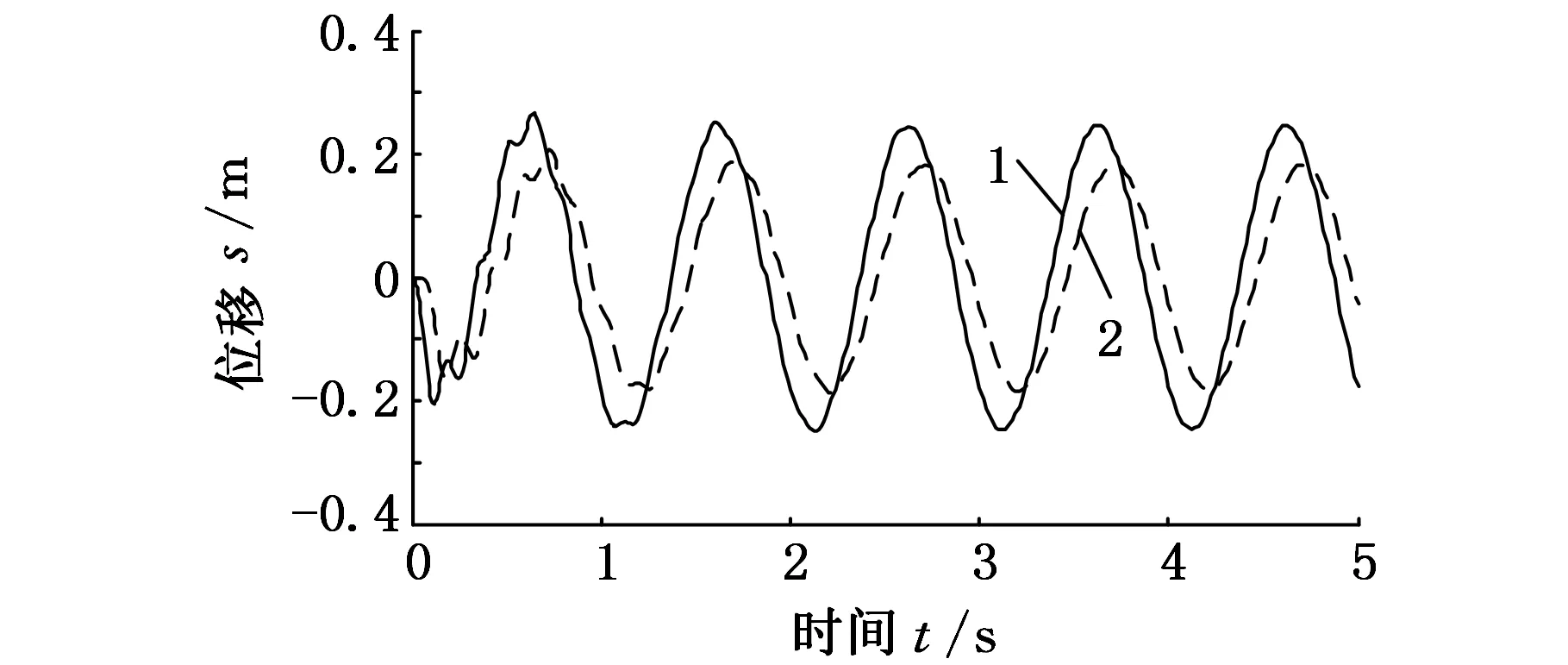
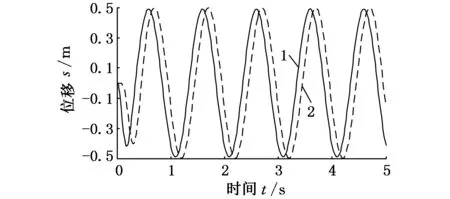
图8所示为采用普通PID控制一个液压缸调绳的情况,液压缸1是扰动输入位移。由图8可知,一个液压缸调绳时系统有一定的超调,随着扰动频率的增大,电液伺服系统的调绳性能下降,在扰动频率为1 Hz时,钢丝绳有较大的纵向振动,钢丝绳张力差较大,液压缸进行调绳有较大的滞后,调绳效果不理想。在扰动频率为0.01 Hz和0.1 Hz时提升系统的钢丝绳纵向振动较小,电液伺服系统能够对这种工况下的钢丝绳调绳。
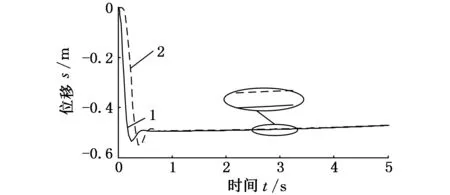
(a)频率为0.01 Hz
(b)频率为0.1 Hz
(c)频率为1 Hz1.液压缸1 2.液压缸2图8 一个液压缸调节位移的变化(普通PID控制)
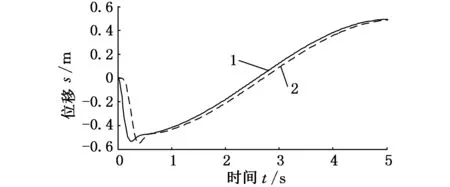
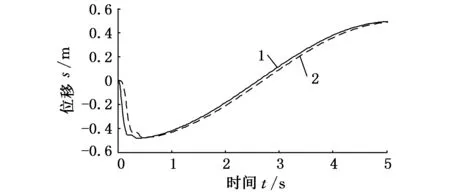
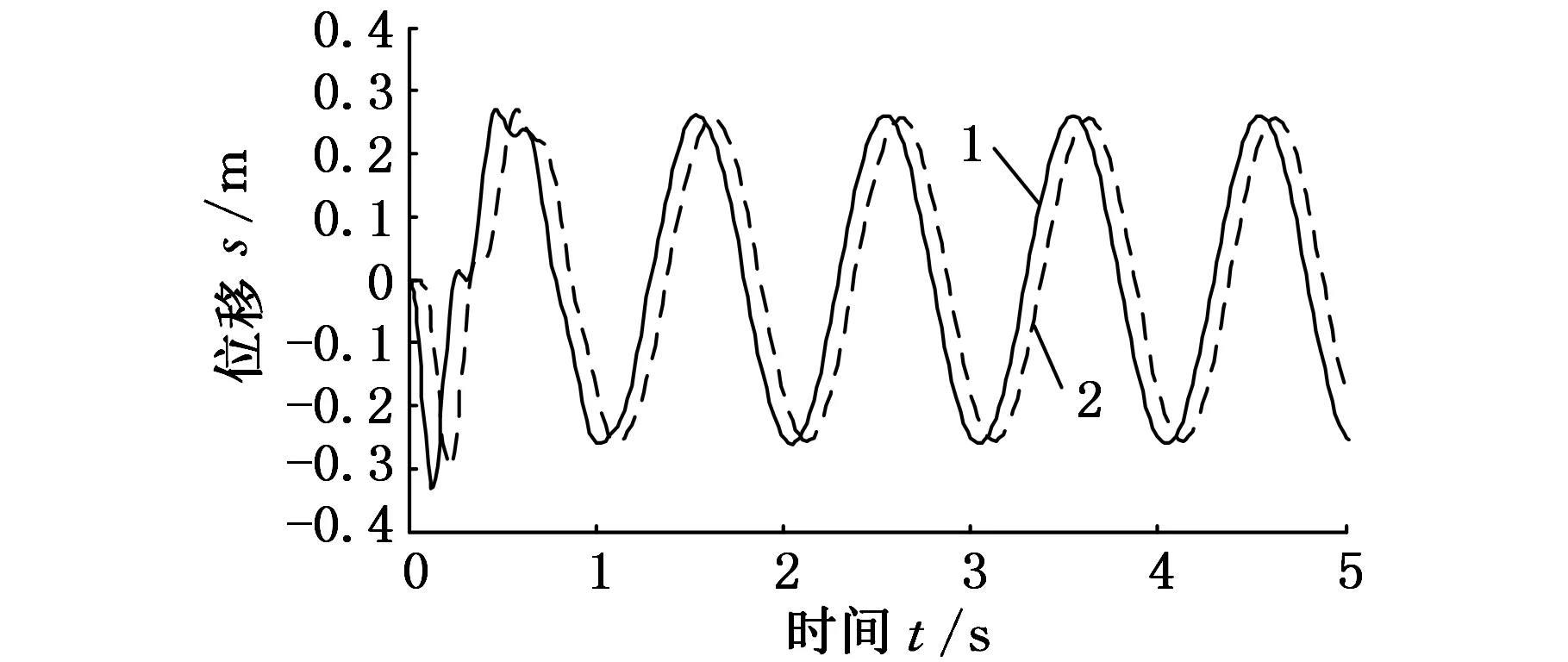
图9所示为采用普通PID控制两个液压缸同时进行调绳的情况,液压缸1是扰动输入和调绳后的液压缸位移。由图9可知,两个液压缸调绳比一个液压缸调绳的误差小,但有较大的超调。究其原因,主要是两个液压缸同时进行调绳,响应速度较快,钢丝绳存在一定的附加扰动,引起初始调绳阶段较大的超调量。尤其在扰动频率为0.1 Hz时液压系统超调量很大,在扰动频率为1 Hz时,液压缸滞后严重,无法满足调绳需求。
(a)频率为0.01 Hz
(b)频率为0.1 Hz
(c)频率为1 Hz1.液压缸1 2.液压缸2图9 两个液压缸调节位移的变化(普通PID控制)
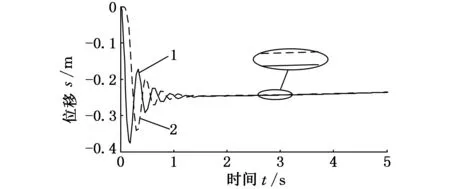
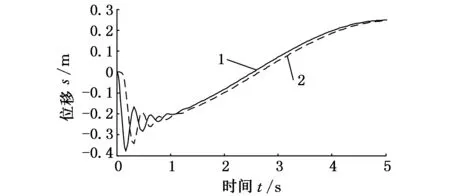
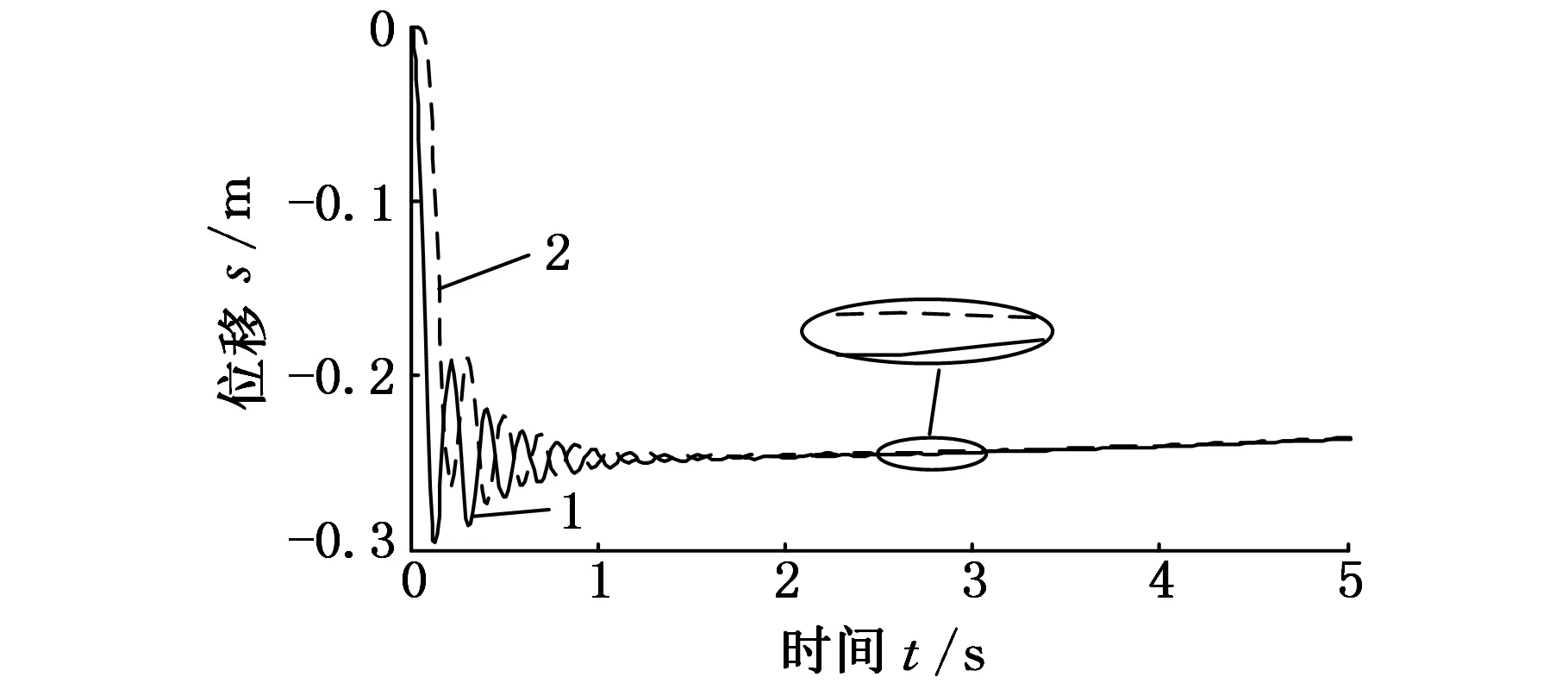
图10所示为采用模糊自适应PID控制一个液压缸调绳的情况,液压缸1是扰动输入位移。由图10可知,在不同的扰动频率下,液压缸进行调绳时,控制系统无超调,响应速度较快。调绳性能优于普通PID控制系统(图8),无附加钢丝绳扰动。这主要是由于模糊自适应PID控制对参数进行了实时在线修正。
(a)频率为0.01 Hz
(b)频率为0.1 Hz
(c)频率为1 Hz1.液压缸1 2.液压缸2图10 一个液压缸调节位移的变化(模糊PID控制)
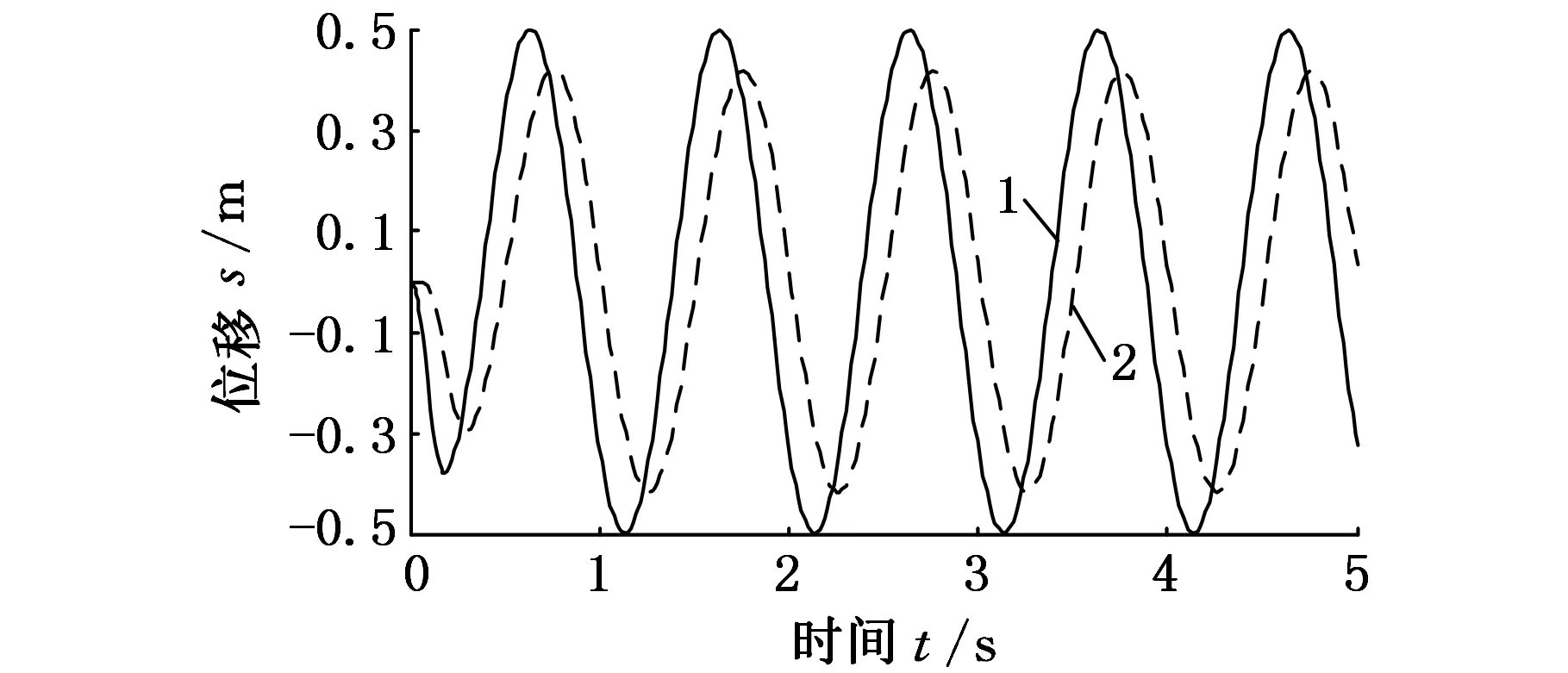
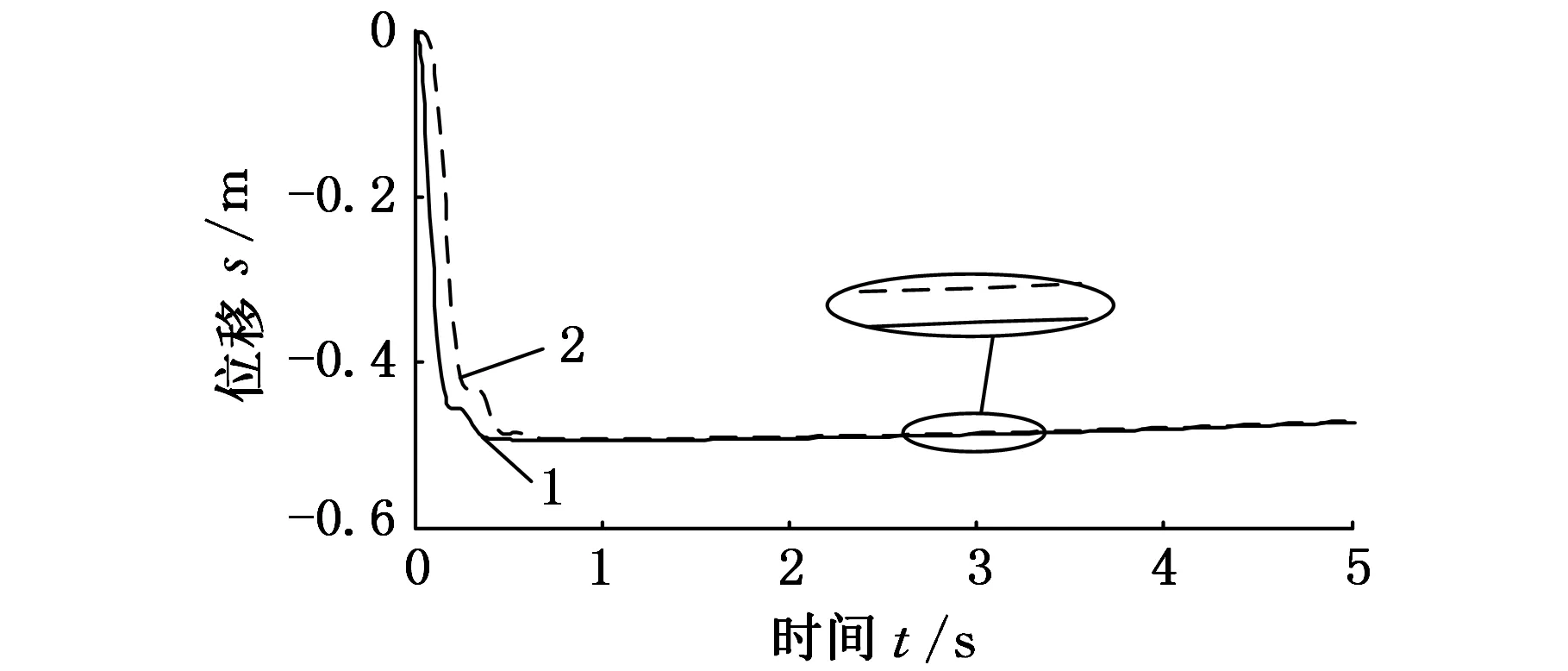
图11所示为采用模糊自适应PID控制两个液压缸同时调绳的情况,液压缸1是扰动输入和调绳后的液压缸位移。由图11可知,与普通的PID控制(图9)相比,模糊自适应PID控制的电液伺服系统使液压缸的响应速度快,超调量较小,稳定性好,调绳误差小,附加扰动较小,能够较好地适应矿机提升过程中的不同扰动工况。
(a)频率为0.01 Hz
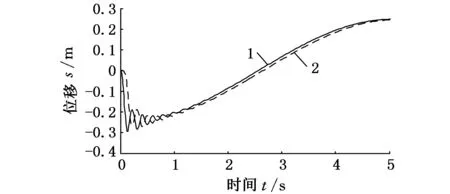
(b)频率为0.1 Hz
(c)频率为1 Hz1.液压缸1 2.液压缸2图11 两个液压缸调节位移的变化(模糊PID控制)
6结论
(1)建立了基于电液伺服系统主动调绳装置模型,设计了电液伺服系统的模糊自适应PID控制器,提出了一种基于模糊自适应PID控制方法的电液伺服系统实现浮动天轮主动调绳控制策略。
(2)由仿真结果可知,基于电液伺服系统主动调绳装置采用模糊自适应PID控制能够在一定的钢丝绳纵振条件下有效地实现调绳。但扰动频率增大到一定程度,钢丝绳纵向振动过大,将不利于调绳,所以在实际生产中,应尽量减少外界对提升系统的扰动,避免钢丝绳有较大的振动,进而引发生产事故。
(3)采用模糊自适应PID控制的电液伺服系统的主动调绳装置响应快,稳定性好,超调量小,两个液压缸的协同控制性能好,调绳误差较小能够实现浮动天轮主动调绳,此控制方法还可以应用到摩擦式矿井提升机中。
参考文献:
[1]李红雷.多绳提升机钢丝绳张力定期监测方法与系统的研究[D].太原:太原科技大学,2010.
[2]Yao J, Xiao X, Peng A, et al. Assessment of Safety for Axial Fluctuations of Head Sheaves in Mine Hoist Based on Coupled Dynamic Model[J]. Engineering Failure Analysis, 2015, 51: 98-107.
[3]吴荣华. 立井摩擦提升钢丝绳张力平衡动态特性及优化研究[D]. 北京:中国矿业大学,2014.
[4]赵强. 摩擦式提升机钢丝绳液压自动平衡装置检测研究[J].煤矿机械,2013,34(8):221-222.
Zhao Qiang. Research on Steel Wire Ropes Hydraulic Automatic Balance Device Test of Friction Hoist[J].Coal Mine Machinery, 2013,34(8):221-222.
[5]高杰.多绳摩擦式提升机张力平衡装置优化分析研究[D].太原:太原科技大学,2011.
[6]戴紫孔.深井提升技术初探[J].中国矿山工程,2012,41(3):59-62.
Dai Zikong. Discussion of Deep Shaft Hoist Technique[J]. China Mine Engineering,2012,41(3): 59-62.
[7]Tivay A, Zareinejad M, Rezaei S M, et al. A Switched Energy Saving Position Controller for Variable-pressure Electro-hydraulic Servo Systems[J]. ISA Transactions, 2014, 53(4): 1297-1306.
[8]曾克俭,李光.液压柔性机械臂奇异摄动法控制[J].中国机械工程,2006,17(11):1128-1131.
Zeng Kejian, Li Guang. Singular Perturbation Control Approach to a Hydraulically Driven Flexible Manipulator[J]. China Mechanical Engineering, 2006,17(11):1128-1131.
[9]王治国.矫直机液压系统设计与控制研究[D].沈阳:东北大学,2009.
[10]高峰,王媛,李艳,等.固着磨料双面研磨压力模糊自整定 PID 控制方法研究[J].中国机械工程,2015,26(2):162-166.
Gao Feng, Wang Yuan, Li Yan, et al. Study on Fuzzy Self-tuning PID Parameters Control Method of Double-side Plane Lapping Force with Solid Abrasive Materials[J]. China Mechanical Engineering, 2015,26(2):162-166.
[11]Zheng J, Zhao S, Wei S. Application of Self-tuning Fuzzy PID Controller for a SRM Direct Drive Volume Control Hydraulic Press[J]. Control Engineering Practice, 2009, 17(12): 1398-1404.
[12]Soyguder S, Karakose M, Alli H. Design and Simulation of Self-tuning PID-type Fuzzy Adaptive Control for an Expert HVAC System[J]. Expert Systems with Applications, 2009, 36(3): 4566-4573.
[13]李敏捷.基于PID算法的电液比例同步控制系统的研究及应用[D].重庆:重庆大学,2014.
[14]洛阳矿山机械工程设计研究院.超深矿井提升装备的高提升能力创新结构设计技术报告[R].洛阳:中信重工机械股份有限公司,2014.
(编辑王旻玥)
收稿日期:2015-07-10
基金项目:国家重点基础研究发展计划(973计划)资助项目(2014CB049402);河南省基础与前沿技术研究计划资助项目(132300410001);河南省高校科技创新团队支持计划资助项目(15IRTSTHN008)
中图分类号:TH137;TD534
DOI:10.3969/j.issn.1004-132X.2016.14.006
作者简介:马伟,男,1955年生。河南科技大学机电工程学院教授、博士研究生导师。主要研究方向为机械结构动力学、轴承设计及制造、动态性能分析与故障诊断技术、逆向工程等。出版专著2部,发表论文30余篇。景月帅,男,1987年生。河南科技大学机电工程学院硕士研究生。李济顺,男,1963年生。河南科技大学机电工程学院教授、博士研究生导师,洛阳矿山机械工程设计研究院教授。邹声勇,男,1964年生。洛阳矿山机械工程设计研究院教授级高级工程师。薛玉君,男,1971年生。河南科技大学机电工程学院教授、博士研究生导师。杨芳,男,1982年生。河南科技大学机电工程学院讲师、博士。
Research on Floating Sheave Active Adjusting Rope Performance in Multi Rope Winding Hoist Using Electro-hydraulic Servo System
Ma Wei1Jing Yueshuai1Li Jishun1,2Zou Shengyong2Xue Yujun1Yang Fang1
1.Henan Key Laboratory for Machinery Design and Transmission System,Henan University of Science and Technology, Luoyang, Henan, 471003 2.State Key Laboratory of Mining Heavy Equipment,Luoyang Mining Machinery Engineering Design Institute, Luoyang, Henan, 471039
Abstract:In the working processes of ultra deep mine hoist with multi rope winding, floating sheave active adjusting rope used electro-hydraulic servo system to adjust wire rope tension. According to the floating sheave adjusting the rope’s structures and principles the electro-hydraulic servo system mathematical model was constructed,a fuzzy adaptive PID controller of electro-hydraulic servo system was designed, a control method of floating sheave active rope was proposed based on a fuzzy adaptive PID control of electro-hydraulic servo system.The corresponding digital model was built, the vibration of wire rope was simulated with the sinusoidal function of different frequencies, and the dynamic characteristics of hydraulic cylinder was analyzed. Simulation results prove the effectiveness of floating sheave active adjusting rope device based on electro-hydraulic servo system by a fuzzy adaptive PID control method.
Key words:floating sheave; dynamic characteristic; hoist; fuzzy adaptive PID
