涵道式无人飞行器的动力学建模与运动稳定性分析
2016-08-09刘云平张永宏李先影
刘云平 陈 城 张永宏 李先影 梅 平
1.南京信息工程大学,南京,210044 2.北京航空航天大学,北京,100191
涵道式无人飞行器的动力学建模与运动稳定性分析
刘云平1,2陈城1张永宏1李先影1梅平1
1.南京信息工程大学,南京,2100442.北京航空航天大学,北京,100191
摘要:涵道式无人飞行器在起飞/着陆过程中,由于近地空间复杂气流等扰动的作用,极易产生钟摆振动、精度降低、失控坠落等运动失稳现象。针对求解动力学方程或Lyapunov直接法分析系统运动稳定性存在着方程难以求解及Lyapunov函数难以构建等问题,通过Lyapunov指数方法建立了飞行器结构参数与系统运动稳定性之间的量化关系,为指导系统的机械结构设计及控制系统优化,提高其系统的可靠性和稳定性提供参考。该方法与Lyapunov直接法相比,具有可构建性、计算过程简单等特点。
关键词:涵道式无人飞行器;起飞与着陆;Lyapunov指数;动力学模型
0引言
涵道式无人机自产生到现在,运动稳定性、能耗等问题一直困扰其发展[1]。由于其活动区域主要位于地形复杂、气流频繁的近地空间,故极易产生钟摆振荡、精度恶化、失控坠落等运动失稳问题[2-3]。而无人飞行器及携带设备的高成本及事故时对地面的危险性,要求它整个系统设计具有较高的鲁棒稳定性和可靠性[4-5]。
运动稳定性理论主要是研究系统在受到干扰后的运动状态与原预定运动状态之间发散或收敛的运动特性,Lyapunov直接法分析运动稳定性的关键是构建Lyapunov函数,但是Lyapunov函数没有一般的构造方法,而且也不唯一,这大大限制了该方法的广泛应用。对于含噪声干扰涵道式无人机等,其Lyapunov函数甚至无法得到[6]。复杂非线性系统的运动稳定性是多自由度、强耦合的非线性系统,其动力学方程非常复杂,无法准确给出,因此成为当前热点和难点。
Lyapunov指数可以定量地描述系统受到扰动后的初值与原初值两条轨道随时间推移按指数方式发散或收敛的程度。与Lyapunov直接法相比,通过Lyapunov指数方法分析系统的运动稳定性[7-8],不仅具有可构建性[9-10],而且能够量化分析系统的运动稳定性,因而适合涵道式无人飞行器等含噪声干扰的复杂非线性系统的运动稳定性分析[11]。文献[12]将Lyapunov指数很好地应用在生物力学领域,文献[13]通过Lyapunov指数方法研究了被动步行机器人运动过程中的稳定性。
运动稳定性的提高主要是指通过改变飞行器的结构参数或输入控制力矩来影响其动力学特性,而输入力矩的大小与其动力学参数又是密切相关的。因此,本文通过Lyapunov指数方法建立动力学参数与系统运动稳定性之间的量化关系。
1动力学建模
本文以图1所示拓扑构型的单涵道式无人飞行器为对象,以欧拉-庞卡莱方程建立整个系统的动力学方程,选取广义坐标Θ=[φθψxyz],φ、θ、ψ为3-2-1欧拉角,作为三个方向上的姿态角,x、y、z为线位移。定义伪速度Ω=[pqruvw],p、q、r是角速度,u、v、w是线速度。
图1 单涵道式无人飞行器
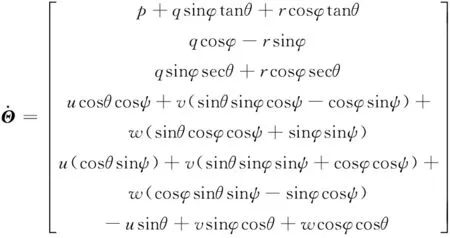
首先建立飞行器的运动学方程:

(1)

欧拉-庞卡莱形式的动力学方程的关键是建立系统的动能函数,即
式中,M(Θ)为惯性矩阵。
考虑第k个刚体连杆,设Icm(k)表示其关于质心在坐标系F(k)下的惯量张量,a(k)表示从质心到任意点O的位置矢量关于质心的空间惯量,Mcm表示质心关于空间的惯性,MO表示质心关于任意点O的空间惯性,则有

欧拉-庞卡莱方程可化简为如下形式:
(2)
QΩ=(V(Θ))TQ
式中,C(Θ,Ω)为哥氏力;F(Θ)为黏性摩擦力及重力;QΩ为外力;μ(Θ)为势能函数;Xj为欧几里德形位矩阵。
注意QΩ为Ω坐标系下的广义力,为螺旋桨推力、机身受到的空气阻力及涵道升力之和。
螺旋桨升力及力矩分别为
式中,P、CT、ρ∞、A、ωe、R分别为发动机的额定功率、螺旋桨的升力系数、远端空气密度、旋翼圆盘的面积(A=πR2)、螺旋浆的旋转角速度、螺旋桨的桨叶长度。
机身受到的空气阻力及力矩分别为
Taero=FaeroZaero
式中,CD为飞行器上的气动阻力系数;Zaero为飞行器的几何中心到飞行器的质心距离;S为飞行器的特征面积;vi为飞行器的诱导速度。
涵道升力及力矩分别为
Fvane=
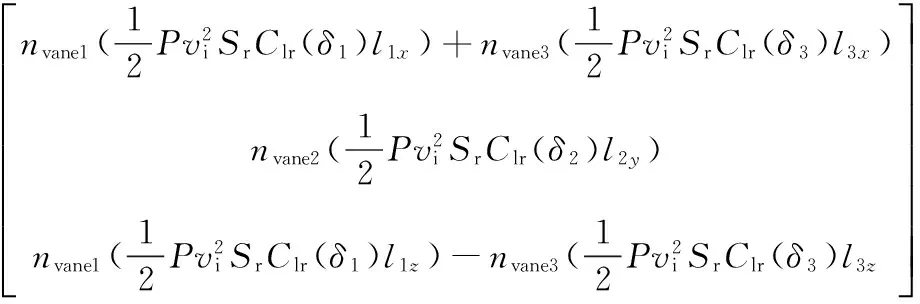
式中,Sr为控制舵面特征面积;Clr为控制舵面的量纲一升力系数,与舵面的偏转角有关(Clr=Cr/δ);Cr为升力系数;δ为舵偏角;下标1、2、3分别表示舵片1、舵片2、舵片3;lx、ly、lz分别为舵的气动中心距飞行器质心的距离在x、y、z轴方向的投影;nvane为控制的舵片数。
将式(1)和式(2)转换成状态方程形式为
(3)
其中,X=[Θ Ω]=[φθψxyzpqruvw]
式中,Ix、Iy、Iz分别为绕x、y、z轴的转动惯量;Fx、Fy、Fz分别为在x、y、z轴上的总的力之和;L、M、N分别为在x、y、z轴上的总的转动惯量之和。
2Lyapunov指数计算
Lyapunov指数的具体分析方法如下:在Lyapunov指数小于0的方向上,相体积收缩,无人机系统运动稳定且系统对初始条件不敏感,反之不稳定。Lyapunov指数计算公式为
(4)
Lyapunov指数的大小由函数f(X)在Xi处的雅可比矩阵|df(X)/dX|Xi决定,将式(3)代入式(4)中就可以通过Lyapunov指数建立飞行器动力学参数与系统运动稳定性之间的量化关系。
由式(3)可得系统轨迹切向量W的演化满足变分方程:
(5)
式中,X(t)为式(4)的解;J(X)为方程的雅可比矩阵。


图2 Lyapunov指数计算流程
3实例分析
以涵道式无人飞行器为对象,通过Lyapunov指数分析其起飞/着陆过程的运动稳定性。飞行器的结构参数如表1,我们可以通过Lyapunov指数建立飞行器和运动稳定性的量化关系。

表1 结构参数的取值
仿真结果如图3~图10所示。将图3、图4与图7、图8进行对比可知:当涵道螺旋桨的转速慢慢增大,作用在竖直方向上的合力大于其重力时,飞行器进入起飞阶段,如图3、图4所示;当慢慢减小螺旋桨的转速,重力大于竖直方向上的合力时呈现下降着陆趋势,如图7、图8所示。
将图5、图6与图9、图10进行对比可以得出:无人机起飞阶段,系统姿态Lyapunov指数谱收敛于0的速度比系统着陆阶段快,涵道无人机在起飞阶段的稳定性比系统在着陆阶段的稳定性好。实际现象就是:无人机可以稳定起飞,但着陆时很难平稳着陆,这一现象恰好阐释了许多民用飞机在降落时更容易失事的原因。我们通过Lyapunov指数建立动力学参数与系统运动稳定性之间的量化关系,从而为下一步通过改变系统的结构参数来提高无人机在着陆方面的运动稳定性提供参考。
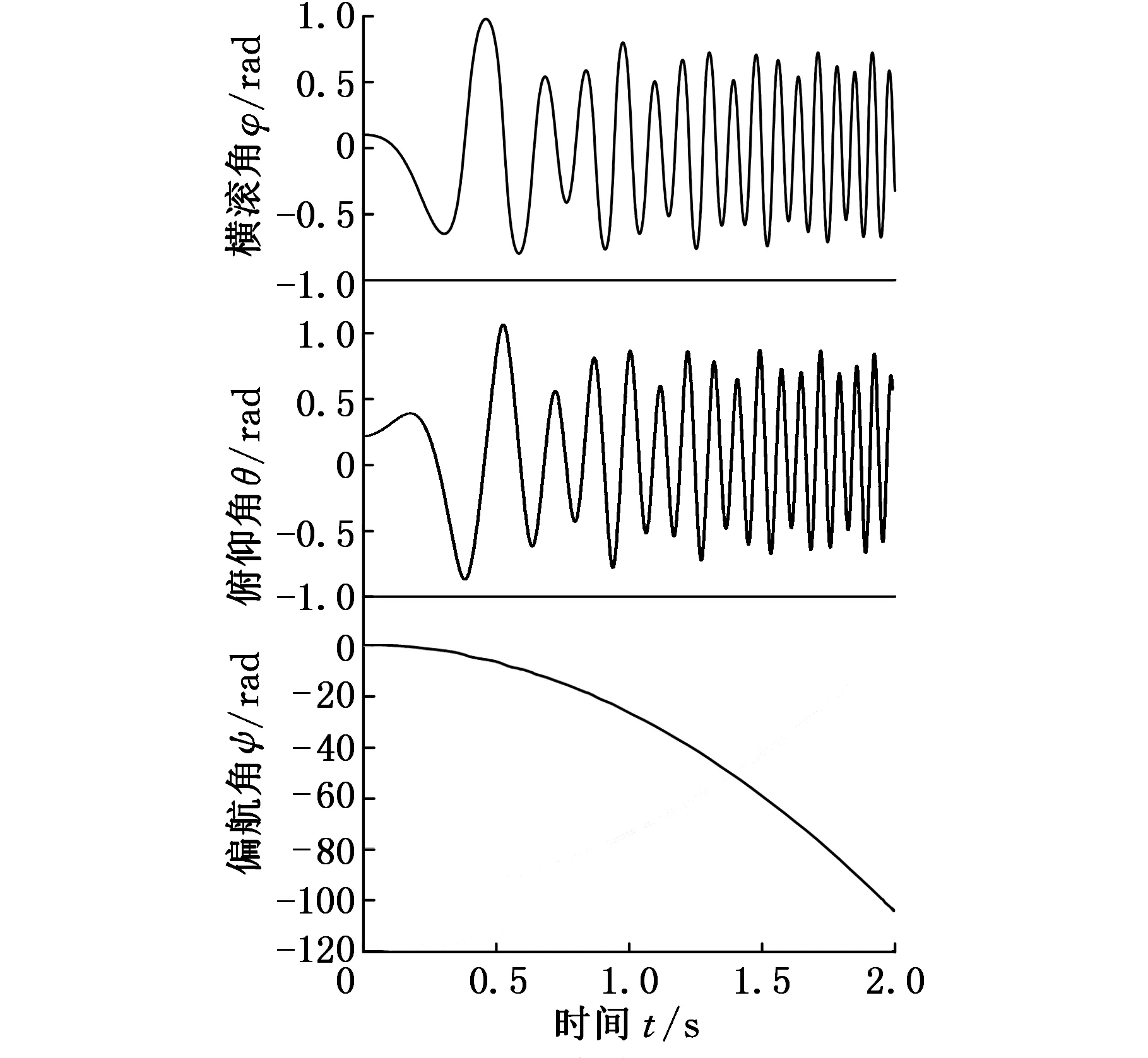
图3 起飞阶段姿态曲线的角位移

图4 起飞阶段姿态曲线的线位移
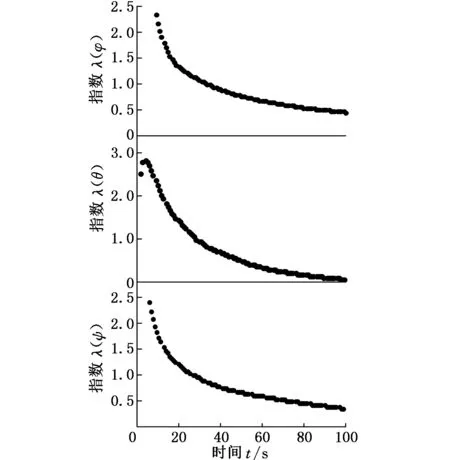
图5 起飞阶段的角位移Lyapunov指数
4结语
针对涵道式无人机等含噪声干扰、多自由度、强耦合的非线性系统,本文给出了通过Lyapunov指数方法分析飞行器运动稳定性的方法。首先通过欧拉-庞卡莱方程建立系统的动力学方程,然后建立飞行器的运动参数与Lyapunov指数之间的计算关系,从而建立系统运动参数与系统运动稳定性之间的量化关系。最后,通过实例仿真分析了飞行器在起飞和着陆阶段过程的动力学特性,为下一步的系统的控制系统优化提供有益的参考。
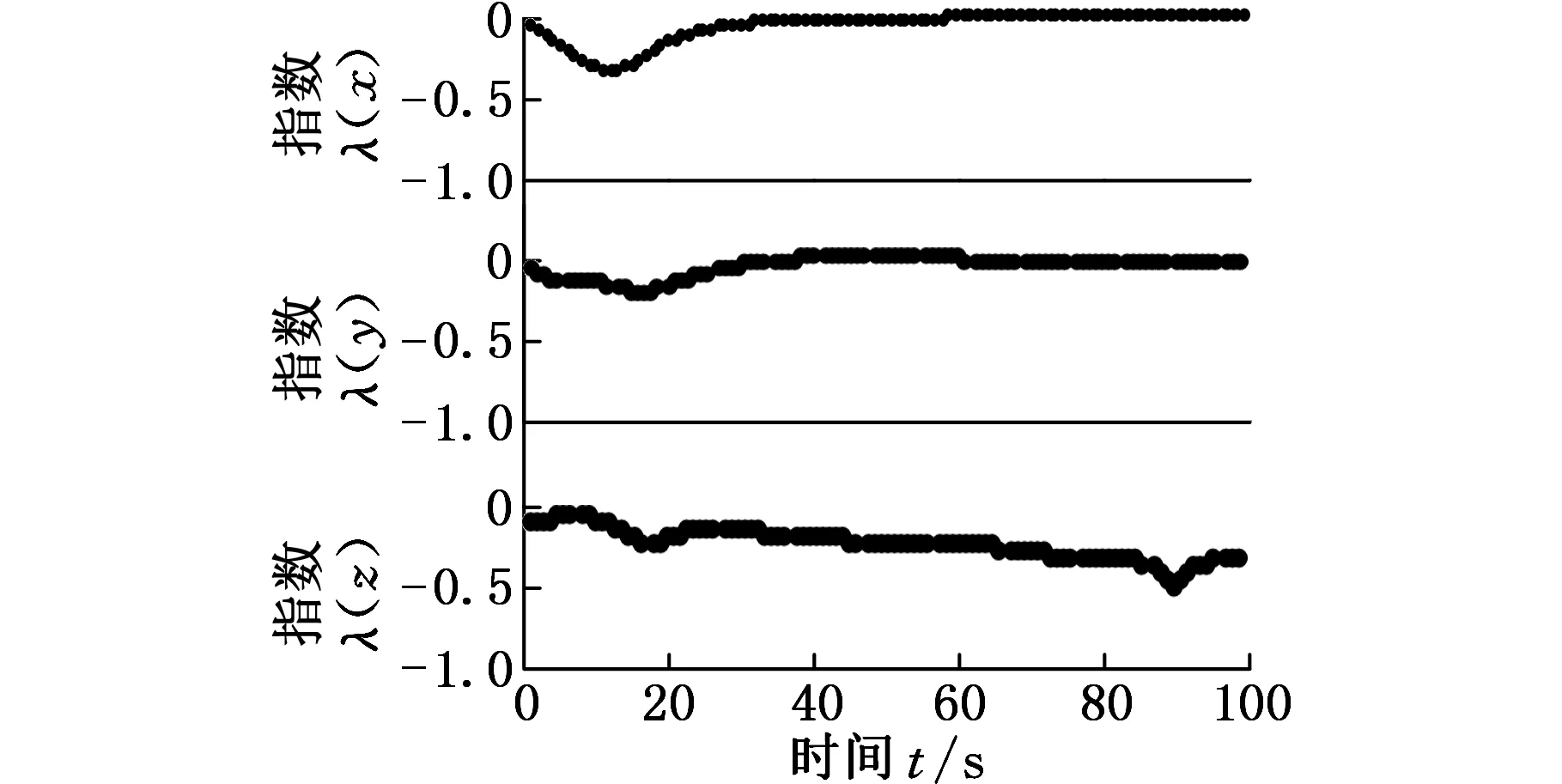
图6 起飞阶段的线位移Lyapunov指数

图7 着陆阶段姿态曲线的角位移
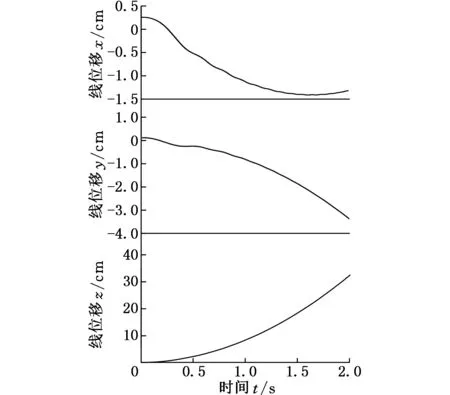
图8 着陆阶段姿态曲线的线位移

图9 着陆阶段的角位移Lyapunov指数

图10 着陆阶段的线位移Lyapnov指数
参考文献:
[1]WangShihua.NumericalAnalysisofAerodynamicCharacteristicsfortheDesignofaSmallDuctedFanAircraft[J].JournalofSoftware, 2010, 5(7):753-760.
[2]AmiriN,Ramirez-SerranoA,DaviesRJ.IntegralBacksteppingControlofanUnconventionalDual-fanUnmannedAerialVehicle[J].JournalofIntelligent&RoboticSystems, 2013, 69(4):147-159.
[3]李远伟,奚伯齐,伊国兴,等.小型涵道式无人机的研究进展[J]. 哈尔滨工业大学学报, 2010, 42(5): 700-704.
LiYunwei,XiBoqi,YiGuoxing,etal.TheResearchProgressoftheSmallDuctedFanAircraftUnmannedAerialVehicle(UAV)[J].JournalofHarbinInstituteofTechnology. 2010, 42(5): 700-704.
[4]RispoliF,SheardAG.ComputationalAnalysisofNoiseReductionDevicesinAxialFanswithStabilizedFiniteElementFormulations[J].ComputationalMechanics, 2012, 50 (6): 695-705.
[5]KumonM,KatupitiyaJ,MizumotoI.RobustAttitudeControlofVectoredThrustAerialVehicles[C]// 18thIFACWorldCongress.Milano, 2011:2607-2613.
[6]YangCaixia,WuCQ.ARobustMethodonEstimationofLyapunovExponentsfromaNoisyTimeSeries[J].NonlinearDynamics, 2011, 64:279-292.
[7]AkturkA,CamciC.ExperimentalandComputationalAssessmentofaDucted-fanRotorFlowModel[J].JournalofAircraft, 2012, 49(3):885-897.
[8]YangCaixia,WuCQ,ZhangPei.EstimationofLyapunovExponentsfromaTimeSeriesforN-dimensionalStateSpaceUsingNonlinearMapping[J].NonlinearDynamics, 2012, 4 (69):1493-1507.
[9]YangCaixia,WuQiong.OnStabilityAnalysisViaLyapunovExponentsCalculatedfromaTimeSeriesUsingNonlinearMapping—aCaseStudy[J].NonlinearDynamics, 2009, 59(1):239-257.
[10]KantzH,RadonsG,YangHongliu.TheProblemofSpuriousLyapunovExponentsinTimeSeriesAnalysisandItsSolutionbyCovariantLyapunovVectors[J].J.Phys.A:Math.Theor., 2013, 46(25):1-24.
[11]ZhangWC,TanSC,GaoPZ.ChaoticForecastingofNaturalCirculationFlowInstabilitiesunderRollingMotionBasedonLyapunovExponents[J].ActaPhys.Sin., 2013, 62 (6):060502.
[12]LamothCJ,vanDeudekomFJ,vanCampenJP.GaitStabilityandVariabilityMeasuresShowEffectsofImpairedCognitionandDualTaskinginFrailPeople[J].JournalofNeuroEngineeringandRehabilitation, 2011, 8(2):1-9.
[13]SunYuming,WangX,WuQing,etal.OnStabilityAnalysisviaLyapunovExponentsCalculatedBasedonRadialBasisFunctionNetworks[J].InternalJournalofControl, 2011, 84(8): 326-1341.
(编辑袁兴玲)
收稿日期:2015-08-20
基金项目:国家自然科学基金资助项目(51405243, 51575283);江苏省自然科学基金资助项目(BK20130999)
中图分类号:TV2018
DOI:10.3969/j.issn.1004-132X.2016.14.002
作者简介:刘云平,男,1979年生。南京信息工程大学江苏省大气环境与装备技术协同创新中心副教授、博士,北京航空航天大学机器人研究所博士后研究人员。主要研究方向是机器人动力学与运动稳定性。发表论文10余篇。陈城,男,1991年生。南京信息工程大学信息与控制学院硕士研究生。张永宏,男,1975年生。南京信息工程大学信息与控制学院教授、博士。李先影,女,1989年生。南京信息工程大学信息与控制学院硕士研究生。梅平,女,1981年生。南京信息工程大学信息与控制学院讲师。
Dynamics Modeling and Stability Analysis of a Ducted Fan Unmanned Aerial Vehicle
Liu Yunping1,2Chen Cheng1Zhang Yonghong1Li Xianying1Mei Ping1
1.Nanjing University of Information Science and Technology,Nanjing,210044 2.Beihang University,Beijing,100191
Abstract:The problems of dynamic stability of the ducted fan unmanned aerial vehicles, such as cornering, shake, loss of accuracy of command tracking and loss of control, were very easy to arise during take-off and landing due to the disturbances from the complex airflow. Analyzing the dynamic stability of this system based on solving the dynamics equation or the direct method of Lyapunov was very difficult due to being difficult to solve the equations and to derivate Lyapunov function and so on. Hence, a Lyapunov exponent approach was used to establish the quantitative relationship among the structural parameters of a unmanned aerial vehicle and its dynamic stability for guiding the design of the vehicle's mechanical structure and the optimization of its stability control by using the relationship, which provided important basis for promoting the dynamic stability and reliability of this system. Compared with the direct method of Lyapunov for analyzing of the stability, the method of Lyapunov exponents is easier to build and the calculation process is simpler.
Key words:ducted fan unmanned aerial vehicle; take-off and landing; Lyapunov exponents; dynamics model
