结构光检测大型止推环止推面平面度探究
2016-06-28何文彦曹学东
何文彦,曹学东,匡 龙,张 鹏
(1.中国科学院光电技术研究所,成都610209;2.中国科学院大学,北京100049)
结构光检测大型止推环止推面平面度探究
何文彦1,2,曹学东1,匡 龙1,张 鹏1
(1.中国科学院光电技术研究所,成都610209;2.中国科学院大学,北京100049)
为指导高精度大型止推面加工,需要对其平面度进行面采样测试。本文建立了结构光检测模型:激光器投射平行条纹到被测表面,CCD相机接收包含条纹的图像。被测面理想的情况下,CCD相机接收到直条纹;当被测面存在凹凸时,条纹发生扭曲,扭曲量和高度存在比例关系。论文推导了结构光检测一体式装置的数学模型,分析了入射角对测量精度的影响。实验结果表明,入射角越大,系统分辨力越高;当入射角度继续增大时,检测精度有望达到要求,然而图像畸变严重,处理困难。论文提出改进分体式检测装置,CCD相机固定在待测面正上方,线激光阵列以相同角度入射。在入射角为85°时,对400 mm×400 mm的平面检测时,采用4 096 pixel×4 096 pixel的CCD,借助亚像素技术,结构光检测系统分辨力可以达到亚微米级别。
大面型;平面度;面采样;线结构光
0 引言
止推环是光电望远镜的支撑器件,随着望远镜口径的增加,止推环尺寸也越来越大。目前光电所的止推环直径已达数米,环形宽度已达到400 mm。作为支撑器件,止推环的平面度决定望远镜轴系精度。我所对大尺寸止推环平面度要求≤0.02 mm,测量误差≤0.01 mm。
传统平面度测量有以下几种:跨桥-水平仪是基于倾斜角的单点测量;三点支撑法不能测量非连续表面(表面有凸台、孔槽)[1];液面仪是对比标准平面和待测平面的液面高度,其精度取决于尺度刻画;三坐标机不适合于加工现场测试;转台-摆臂轮廓仪在测量大面型时,摆臂校准困难[2];激光平面度仪法成功检测Φ2.5 m的圆环平面,随着测量范围的扩大,衍射光斑的影响较大[3-4];多站激光跟踪仪在对宽度400 mm的圆环平面检测上精度可以达到0.004 mm[5]。就平面度检测需求来看,以上检测均为单点检测,对止推面自动修研指导存在局限性。本文提出结构光检测平面度的方法,该方法可以实现面采样,其检测结果能够作为止推面自动修研的参考指导。
1 拼接法测量大面型圆环平面度
待测圆环带宽400 mm,拟采取400 mm×400 mm面形结构光(Line Structured Light,LST)检测,每次重叠区域20%。对每次检测得到的结果拼接,从而得出整个圆环的平面度。因此,单次测量希望精度≤0.005 mm。拼接法检测带宽400 mm的圆环平面度原理见图1(a)。

图1 拼接法线结构光检测模型Fig.1Joint detection by LSL
2 结构光检测一体式装置
2.1 一体式检测装置原理
现有结构光检测设备中,400 mm×400 mm范围内测量仪精度最高为0.015 mm,在现有基础上改进有望满足精度要求。常见的结构光编码方式有两种:正弦光和黑白光。中科院光电所赵文川采用正交方向的正弦光检测4.4 mm×4.4 mm的镜面瑕疵时,精度可达亚微米级别[6]。但是,由于正弦光检测基于镜面反射原理,光源尺寸为待测面的2倍[7];本课题所检测止推面面型较大,未经抛光,因此该方法不适用。本文提出基于条纹扭曲的结构光检测,光源为黑白条纹。
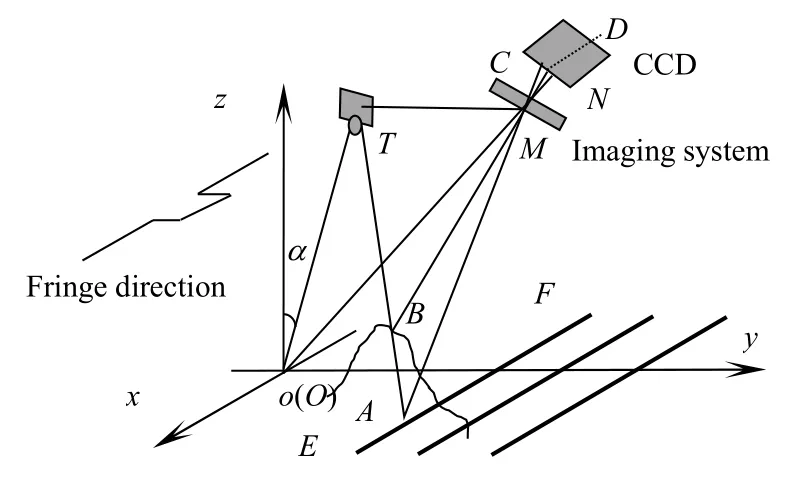
图2 线结构光检测平面度一体式装置原理图Fig.2Combined device of measurement for flatness based on LSL
检测装置一体模型如图2所示:线结构光经过投影仪射向被测表面,由CCD相机采集图像并进行处理。在被测表面理想的情况下,CCD采集到的条纹是一条直线;由于被测面存在凹凸,CCD采集到的条纹发生扭曲,扭曲量和高度具有函数关系。建立世界坐标系o-xyz,令x轴与条纹方向平行,y轴位于投影面并与条纹方向垂直,z轴垂直于条纹面,满足右手定则。被测区域为x方向(-200,200),y方向(-200,200)的方形区域,坐标原点即为待测面中心。投影仪中心与透镜中心等高,设其高度为h,基线TM(投影中心到成像中心)长度为d。投影仪光轴位于xoz平面内,与z轴夹角为a,成像系统光轴通过o点,CCD放置于成像系统像面上,靶面与成像光轴垂直。则投影仪中心坐标为(-h´sina,0,h´cosa),透镜中心M(-h´sina,d,h´cosa)。O、M、N三点共线,物距为l,像距为l′,成像系统放大率:

拟用CCD尺寸为11 mm×11 mm,待测区域400 mm×400 mm,则成像系统放大率β=-11/400。
对o点成像,系统满足小孔成像原理,CCD中心为N(a,b,c),求解过程:

联立式(1)~式(4),在确定l、d、a的情况下,N点坐标可以求得。CCD法线方向为ON,CCD平面方程为

可以唯一确定。假设待测点B相对于xoy平面高度为h,其坐标为B(u′,v′,h),投影光线与xoy平面交于A点(参考点),坐标为(u,v,0),根据透视成像原理,ABT直线方程:

对A、B两点成像,像点分别为C和D。设C、D两点坐标分别为(x1,y1,z1)和(x2,y2,z2),根据小孔成像原理,D、M、O为一条直线;同理,C、M、O也为一条直线,C、D两点均在CCD平面,因此两点坐标分别求得:
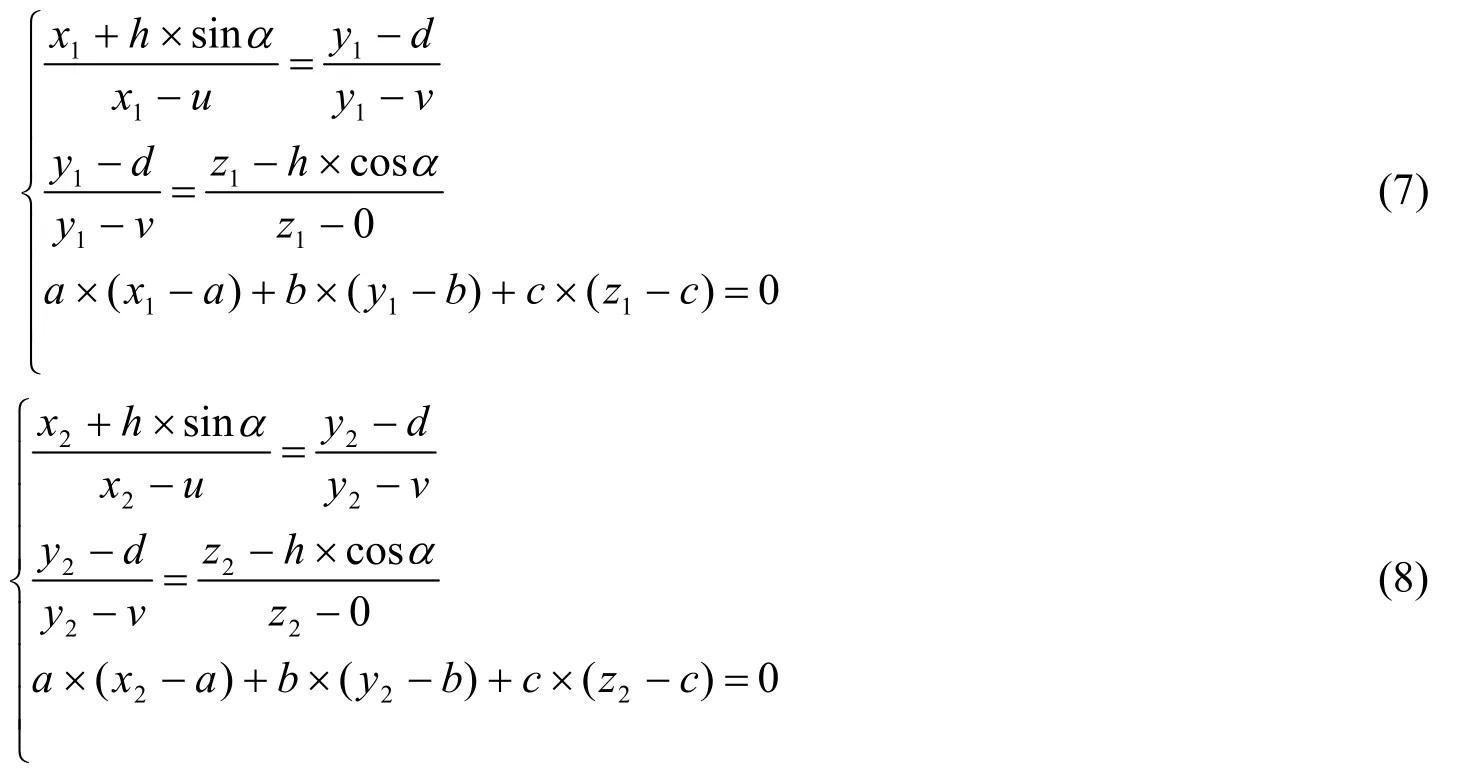
假定参考点A处投影光线为EF,E、F在CCD上的像点分别为E¢(x3,y3,z3)、F¢(x4,y4,z4),则E′CF′在同一直线,B的像点D与E′CF′之间的相对关系见图1(b),根据空间点到直线的距离公式,D点到E′CF′直线的距离d:

由d的数值可以反推出待测点的相对高度,对所有的相对高度值拼接即可计算整个待测面的平面度。
2.2 一体式仿真模型及验证实验
验证实验装置包括一字激光器、1024×1024 CCD相机、成像镜头、待测物块、三脚架等。如图2,固定物距OM为1 000 mm,保持透镜中心和投影中心等高,并且距离TM为200 mm。激光投影中心放置15 mm物块作为待测高度,CCD相机采集图像。通过改变待测物块中心到线激光器的水平距离以及线激光器的高度控制入射角a,具体参数见表1。
保持OM和TM不变,入射角度分别5°,45°,85°,CCD采集包含条纹的图像。对图像依次阈值化、高斯滤波、骨骼化处理提取中心,并计算两条纹之间的距离。仿真结果见表2,实验结果见表3。
2.3 一体式实验结果和数据分析
仿真数据中,当线激光器以45°入射,系统的理论分辨力1.32 mm。假设采用双目系统,精度可提高2倍;借助亚像素技术对像素十细分[11],则采用像素数为4 096 pixel×4 096 pixel的CCD相机扫描400 mm ×400 mm区域时,分辨力可以达到0.017 mm。分析发现,随着入射角增大,系统分辨力会提高。当入射角度为85°时,系统理论分辨力为0.005 mm,满足精度要求。然而,在入射光接近水平的情况下,相机采集到的图像畸变非常严重,图像处理困难。针对以上问题,在原有基础上对结构光检测一体式装置做出改进,提出分体式检测装置模型。

表1 实验装置参数Table 1Parameters of experimental device
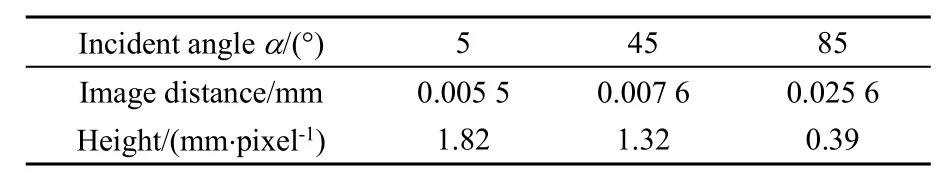
表2 仿真一体式分辨力与入射角关系Table 2Simulation of resolution-incident angle for combined

表3 验证一体式分辨力与入射角关系Table 3Verify of resolution-incident angle for combined
3 结构光检测分体式装置
3.1 分体式原理
结构光检测分体式装置模型如图3,线激光阵列位于y轴上方,以相同的入射角a投射平行条纹到待测面,CCD相机放置在待测面正上方采集条纹图像。入射角a为入射光线和xoy平面法线的夹角,选择像素数为1 024×1 024的CCD,像元尺寸0.01 mm。对视场400 mm×400 mm区域成像,成像系统放大率为-11/400。则CCD水平分辨力Δx约为0.39 mm/pixel。当系统固定后,水平分辨力保持不变。由投影原理,z轴方向分辨力和水平分辨力呈三角函数关系,如图4所示,即为,Δx和Δh分别代表水平、垂直方向分辨力。当入射角度a变化时,z轴方向分辨力随之变化,如表4所示。
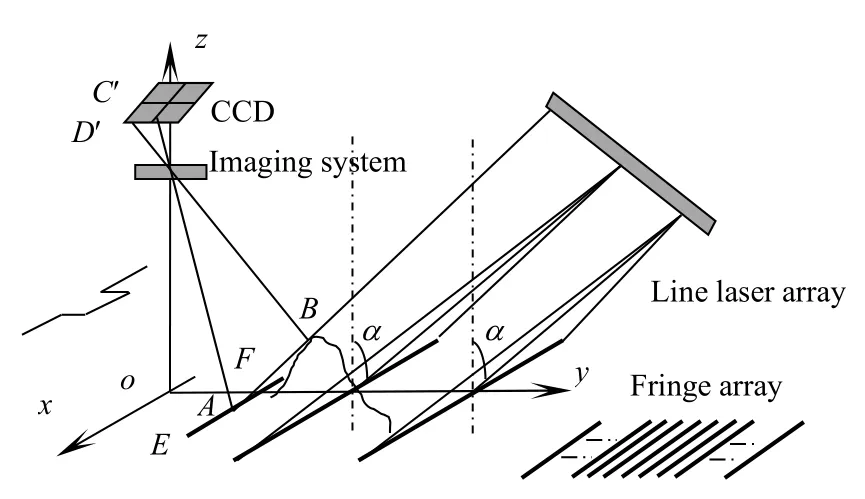
图3 分体式检测装置Fig.3Separated device

图4 分体式条纹扭曲(a)水平-垂直分辨力关系;(b)45º扭曲;(c)80º扭曲Fig.4Fringe distortion of separated device(a)Relation of distortion for horizon and vertical;(b)Distortion 45°;(c)Distortion 80º
3.2 分体式验证实验
对分体式检测模型设置验证实验,1 024×1 024的CCD相机固定在待测物块正上方,光轴垂直于参考面。设置视场为400 mm×400 mm,入射角参数设置同一体式,图5(a)~(c)为一体式得到条纹,(d)~(f)为分体式。用同样的方法计算条纹扭曲量,根据水平-垂直分辨力关系,得到垂直方向分辨力,结果如表5。
3.3 分体式结果分析
z轴分辨力即为系统对平面度的检测分辨力,在入射角为85°时,采用单目系统,借助亚像素技术对像素十细分[11],结构光分体式装置对平面度的分辨力可以达到0.003 mm,满足采样精度0.005 mm的要求。若采用4 096×4 096的CCD,则分辨力有望达到亚微米级别。

表4 仿真分体式分辨力与入射角关系Table 4Simulation of resolution-incident angle

表5 验证分体式分辨力与入射角关系Table 5Verify of resolution-incident angle

图5 一体式/分体式条纹扭曲实验结果Fig.5Distortion of combined/separated device
4 误差源分析
结构光检测平面度装置的误差来源主要有:(a)光源误差:线阵激光的准直性;(b)成像误差:透镜畸变、感应像元排列误差、CCD与光轴不垂直、调焦误差等;(c)待测面基准误差;(d)拼接误差:由于待测面为圆环,多次采样进行拼接,引起误差;(e)标定误差:CCD相机检测前需标定,引起误差;(f)环境误差:止推环修研过程为在线测试,温度、湿度以及空气扰动等;(g)原理误差:计算近似、条纹中心提取算法选取等。
5 结论
本文提出了基于条纹扭曲的结构光检测模型,分析并验证了结构光入射角度对一体式装置检测精度的影响;随后对一体式检测装置做出改进,提出分体式模型,仿真实验结果表明,在入射角85°时,针对尺寸400 mm×400 mm的待测面形,平面度检测精度有望达到亚微米级别,可以满足实际需求。目前需要解决的问题有:1)采用入射角相同的平行光线阵列作为投影光源,从而减小畸变;2)对图像进行边缘处理以提高细分数;3)采用多幅图像平均以减小噪声。
[1]戴晓磊,杨文志,曹学东,等.三点法检测环形平面的平面度误差[J].光电工程,2010,37(5):52-53.DAI Xiaolei,YANG Wenzhi,CAO Xuedong,et al.Flatness Measurement of Large Annular Planes Based on Three-point Method[J].Opto-Electronic Engineering,2010,37(5):52-53.
[2]景洪伟,吴学巧,曹学东,等.精密转台在平面度检测中的应用[J].红外与激光工程,2008,37(增刊):141-143. JING Hongwei,WU Xueqiao,CAO Xuedong,et al.Flatness measurement using precision rotary table[J].Infrared and Laser Engineering,2008,37(Suppl):141-143.
[3]陈宝刚,邵亮,李建峰.大直径窄环带平面平面度的精确测量[J].光电工程,2015,42(8):14-19. CHEN Baogang,SHAO Liang,LI Jianfeng.Precise Measurement of Flatness for Large Diameter Narrow Zone Annular Plane [J].Opto-Electronic Engineering,2015,42(8):14-19.
[4]杨文志,景洪伟,曹学东,等.激光平面度仪的研究[J].红外与激光工程,2008,37(增刊):144-146. YANG Wenzhi,JING Hongwei,CAO Xuedong,et al.Laser flatness instrument[J].Infrared and Laser Engineering,2008,37(Suppl):144-146.
[5]朱文.基于激光跟踪仪的大型精密零件平面度检测技术研究[D].成都:中国科学院光电技术研究所,2014:57-59. ZHU Wen.Study on the flatness measurement of large precision using laser tracker[D].Chengdu:Institute of Optics and Electronics of ChineseAcademy of Sciences,2014:57-59.
[6]赵文川,钟显云,刘彬,等.基于条纹反射的光学表面疵病检测法[J].光子学报,2014,43(9):0912007-2. ZHAO Wenchuan,ZHONG Xianyun,LIU Bin,et al.The Surface Flaws Inspection of Optical Components Based on the Fringe Refection[J].Acta Phonotic Sinica,2014,43(9):0912007-2.
[7]刘元坤,苏显渝,吴庆阳,等.基于条纹反射的类镜面三维面形测量方法[J].光子学报,2006,26(11):1637. LIU Yuankun,SU Xianyu,WU Qingyang,et al.Three Dimensional Shape Measurement for Specular surface Based on Fringe Reflection[J].Acta Phonotic Sinica,2006,26(11):1637.
[8]马玉坤,王中亚,杨国威,等.基于线结构光传感器的公路平整度测量系统[J].传感技术学报,2013,26(11):1597-1603. MA Yukun,WANG Zhongya,YANG Guowei,et al.A System Based on Structured-Light Sensors for Measurement of Pavement Evenness[J].Chinese Journal of Sensors andActuators,2013,26(11):1597-1603.
[9]罗聪.基于结构光的三维重构[D].成都:中国科学院光电技术研究所,2015:4-18. LUO Cong.The three dimensional Reconstruction based on the line Structured Light[D].Chengdu:Institute of Optics and Electronics of ChineseAcademy of Sciences,2015:4-18.
[10]杨再华,李玉和,李庆祥,等.一种基于光学三角法的形貌测量系统[J].光学技术,2005,31(4):622-626. YANG Zaihua,LI Yuhe,LI Qingxiang,et al.Measuring profile system based on optical triangular method[J].Optical Technique,2005,31(4):622-626.
[11]魏振中,高明,张广军,等.一种光斑图像中心的亚像素提取方法[J].光电工程,2009,36(4):7-12. WEI Zhenzhong,GAO Ming,ZHANG Guangjun,et al.Sub-pixel Extraction Method for the Center of Light-spot Image[J]. Opto-Electronic Engineering,2009,36(4):7-12.
APreliminary Based on Structured-Light for Flatness Measurement of LargeAnnular Planes
HE Wenyan1,2,CAO Xuedong1,KUANG Long1,ZHANG Peng1
(1.Institute of Optics and Electronics,Chinese Academy of Sciences,Chengdu610209,China;2.University of Chinese Academy of Sciences,Beijing100049,China)
In order to meet the requirement of high precision when large annular trust plane is gridding,surface sampling is required for flatness.Joint model of measurement based on structured light was propounded.The projector transmitted parallel fringes onto the measured plane,CCD camera caught the images including fringes.When the measurement plane was perfect,CCD camera would catch straight fringes.When there was convex and concave in the palne,the fringes CCD caught would be distorted.There was a set proportional relationship between the distortion and the relative height of the measured point.This paper derived combined model of Structured Light,analyzed the effect of incident angle to the precision.Result of experiment showed:the more incident angle,the higher the precision.As the incident angle increased, the precision would meet the required precision.However,as the incident angle increased,the image was twisted severely and hardly dealt with.A develop model was propounded.CCD camera was located above the measured plane,and array laser scanned the measured plane from a set incident angle.Helped by sub-pix,when the plane with size 400 mm×400 mm was measured,CCD 4 096 pixel×4 096 pixel applied,incident angle 85°,the precision will be the level of submicron.
large annular plane;flatness;surface sampling;line structured light
A
10.3969/j.issn.1003-501X.2016.11.002
1003-501X(2016)11-0007-06
2016-01-25;
2016-04-21
国家863高技术项目
何文彦(1991-),女(汉族),陕西渭南人。硕士,主要研究工作是平面度检测。E-mail:405842830@qq.com。
