基于车身三自由度模型的 EPS系统微分方程
2016-05-30马峻刘本林凌红
马峻 刘本林 凌红
摘 要:电动助力转向系统(简称 EPS)的应用越来越为人们所关注。EPS系统是一个复杂的非线性动力学系统,也是一个离散事件与连续动态事件并存的复杂系统。为更好进行 EPS系统的控制策略设计,需要对 EPS系统建立数学模型。传统的 EPS数学模型大多基于车身二自由度模型建立,这样会造成数据的缺失以及模型的准确度下降。本文基于车身三自由度建立了 EPS系统的数学模型,列出了微分方程,为求解 EPS系统控制策略提供了参考。
关键词:电动助力转向系统;车身三自由度模型;微分方程
1 引言
电动助力转向系统( Electric Power Steering,简称 EPS)直接通过电动机的输出给驾驶员提供动力,电动机只有在转向时才工作,相对液压助力转向而言, EPS省去了动力转向油泵和软管等以及装于发动机上的皮带轮,其轻型小巧、易于装配调整、噪声污染小的特点原来越为人们重视 [1]。近年来, EPS在电动汽车上的应用越来越为人们所关注。电动汽车以蓄电池为能源,突破了 12V或 24V的汽车电压体制,能够提供大功、率电机需要的电流,使 EPS系统能够提供较大的转向助力。可以预见,随着人们对于汽车的环保性、节能性、经济安全性要求的进一步提高, EPS系统的研究和产业化必将会更进一步。
2 EPS系统微分方程的建立
2.1 EPS的工作原理与系统特性
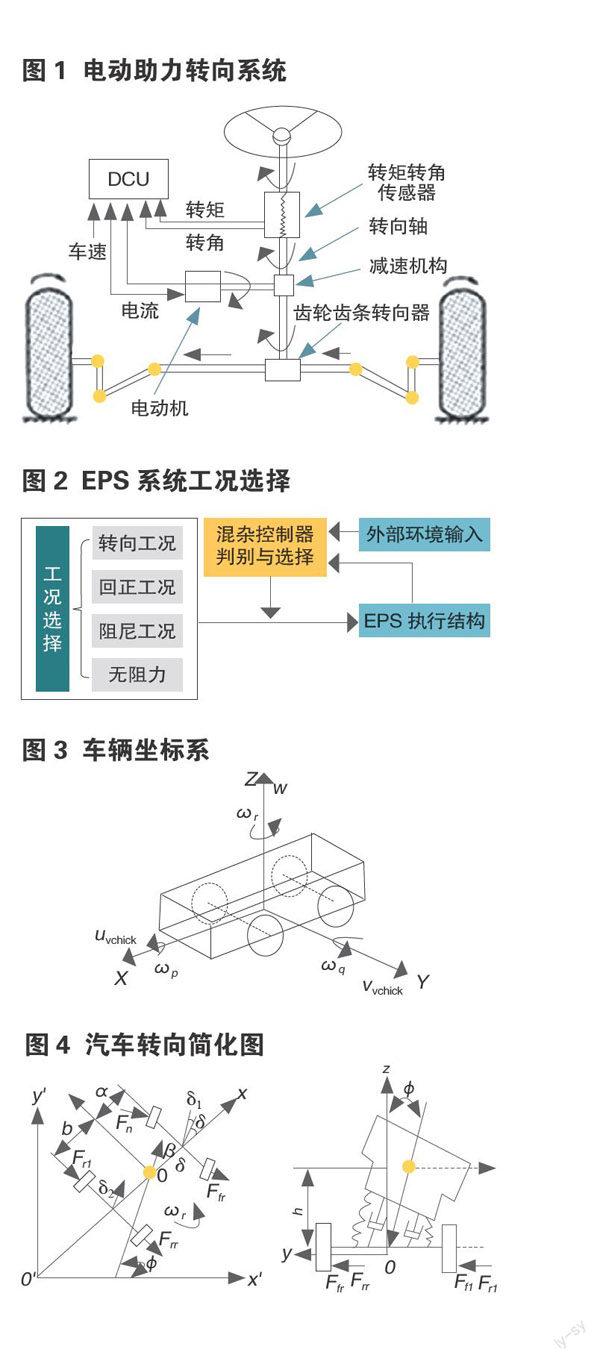
EPS主要包含转矩传感器、助力电机、电子控制器( ECU)以及减速机构,其结构如图 1所示。控制器通过收集车速、转矩、转角等传感器的信号进行判别,决定助力电机的转动方向和助力大小通过精确的控制算法,可以实现转向助力的无级调整,使转向机构获得所需的助力,进而使驾驶员得到较好的路感。[2-4]
EPS系统是一个复杂的非线性动力学系统,也是一个离散事件与连续动态事件并存的复杂系统。其主要特征体现在:首先 EPS系统存在较多的不确定因素,例如温度、湿度的变化,元件老化所造成的参数变化等;其次 EPS系统无法得到精确的模型, EPS系统在建模过程中,往往使用简化后的降阶模型,造成系统部分特性的丢失;最后是 EPS系统测量参数的影响, EPS系统在使用过程中受较多的外界因素影响,如路面的干扰,外界的扰动,传感器测量的噪声等。因此汽车转向时对助力工况、回正工况和阻尼工况要求比较复杂,传统的单一控制模式无法满足。
2.2 EPS的混杂控制分析
混杂系统控制( Hybrid System Control, HSC)是为解决复杂系统的时变性、非线性以及不确定性和系统内的离散事件所采用的一种新型控制方法。
汽车在转向的过程中其车速和方向盘转角变化的区间较大,因此为了提高系统的控制效果,控制器应实时检测转向状态,根据不同的状态切换至不同的控制策略,如图 2所示。
2.3 EPS系统建模
EPS系统模型简化后包含 3个重要动力学元件的物理模型:方向盘和上端输入转向轴、助力电机、齿轮齿条减速机构和下端转向轴 [5]。
依据牛顿运动定律,转向柱上的系统动力学方程为:
Tr——路面产生的阻力矩; Tm——助力电机产生转矩;i——转向轴到前轮传动比;
δ——前轮转角; i'——助力电机到转向轴的传动比;θp——转向小齿轮转角。
2.4 三自由度汽车转向模型
汽车在转向时,一定存在侧倾转向效应,其坐标系设定如图 3所示,设汽车运动时是按照平行于地面的平面运动,转向时发生绕 X轴的侧倾运动,汽车沿 Z轴没有位移,沿 Y轴没有俯仰运动,侧向加速度小于 0.4g,不考虑轮胎的非线性特性,忽略空气阻力。
按照上述条件,将汽车转化为一个四轮支撑,具有侧向、横摆、侧倾三自由度的转向模型,其简化如图 4所示 [6]。
根据上述说明,建立汽车模型的 3自由度微分方程:
3 结论
EPS系统以其优异的性能越来越为人们所关注,尤其在纯电动车上有十分广阔的应用前景,因此发展自主研发的国产 EPS系统具有重要意义。本文建立了三自由度的车身模型,比传统的二自由度模型具有更高的精确性。基于此建立的 EPS系统微分方程能更好的反应系统的工作情况,为 EPS控制器的设计提供更好的参考依据。
参考文献:
[1]Kim J-iHoon, Song Jae-Bok. Control logic for an electric power steering system usingassistmotor[ J].Mechatronics, 2002, 12: 447-459.
[2]Zhao Jingbo, Chen Long, JiangHaobin, et al Design and full car tests of electric power steering system[C].Computer and ComputingTechnologies in Agriculture, Wuyishan:Springer, 2008:729-736.
[3]陈无畏,王妍,王启瑞等. 汽车电动助力转向系统的自适应 LQG控制 [J].机械工程学报:2005(12):167-172
[4]施国标,申荣卫,林逸 .电动助力转向系统的建模与仿真技术 [J].吉林大学学报:工学版, 2007(37): 31-36.
[5]STNBERSKY A,MOSERF,RULKAW. Structural Dynamics and Ride Comfort ofa Rail Vehicle System[J]. Advances inEngineering Software,2002( 33) : 541-552
[6]郭孔辉 .汽车操纵动力学 .长春:吉林科学技术出版社,1991
