风干扰引起的飞行器附加攻角和附加侧滑角计算方法
2016-04-10李争学贺元军张广春李杰奇
李争学,贺元军,张广春,李杰奇,张 永
(1. 中国运载火箭技术研究院研究发展中心,北京,100076;2. 中国载人航天工程办公室,北京,100720)
风干扰引起的飞行器附加攻角和附加侧滑角计算方法
李争学1,贺元军2,张广春1,李杰奇1,张 永1
(1. 中国运载火箭技术研究院研究发展中心,北京,100076;2. 中国载人航天工程办公室,北京,100720)
研究了标称无侧滑飞行基础上受到水平风干扰时的飞行器附加攻角和附加侧滑角计算方法,完善了导弹与运载领域长期、广泛使用的传统的简化计算公式,修正了最大附加攻角和附加侧滑角出现条件的工程经验。提出了标称无侧滑飞行基础上受到水平风干扰时的飞行器附加攻角和附加侧滑角计算方法、水平风方向任意时附加攻角和附加侧滑角最大和最小值计算方法、倾侧角任意时附加攻角和附加侧滑角最大和最小值计算方法、水平风方向和倾侧角均任意时附加攻角和附加侧滑角最大和最小值计算方法,这些方法比航天传统方法使用范围更广、更准确,数值算例验证了其正确性。
风干扰;附加攻角;附加侧滑角
0 引 言
风干扰对大气层内飞行器有显著影响,飞行器的弹道、制导、控制、载荷等多专业的分析和设计工作一般都需要考虑风干扰影响[1~8]。对于主要依靠大推力发动机进行控制的传统运载火箭,发动机控制能力极强,完全可以抵消风干扰的影响,一般不存在发动机控制能力不足、风干扰导致失控的问题。而对于控制能力较弱或控制手段不丰富的飞行器,尤其是主要依靠偏转范围有限的气动舵和较小的姿态控制发动机进行控制的先进面对称飞行器,比如典型的HTV-2,在大攻角飞行阶段或者大风区飞行时控制力矩与风干扰的强弱相当,没有明显优势,风干扰的影响极为严酷,较大的风干扰极可能导致飞行失败。因此,深入研究风干扰对飞行器的影响对于现代很多飞行器极为关键。
风干扰对飞行的直接影响主要体现在有风时实际飞行攻角、侧滑角和马赫数与无风时不一致。攻角、侧滑角、马赫数的改变进一步引起气动力和力矩的改变,最终造成姿态改变以及相应的闭环情况下对操纵机构需求的改变,同时产生作用在飞行器上的气动载荷,对机体结构产生影响。当控制需求超过操纵机构的最大能力时,飞行器便会失控;当载荷超出飞行器结构承受能力时便会解体。
根据航天工程经验,对于高超声速飞行器,风干扰引起的飞行攻角和侧滑角的改变,也就是附加攻角和侧滑角,对飞行影响更为显著,而马赫数变化的影响则相对次要。因此本文主要关心风干扰——特指航天领域关心更多的水平风引起的附加攻角和侧滑角的计算问题,这是深入分析风干扰对飞行器各系统影响的第1步。
按照中国目前仍在广泛使用的航天传统经验,在设计初期进行控制能力评价时,或者在载荷计算中,水平风引起的附加攻角和附加侧滑角按照下式计算[1]:
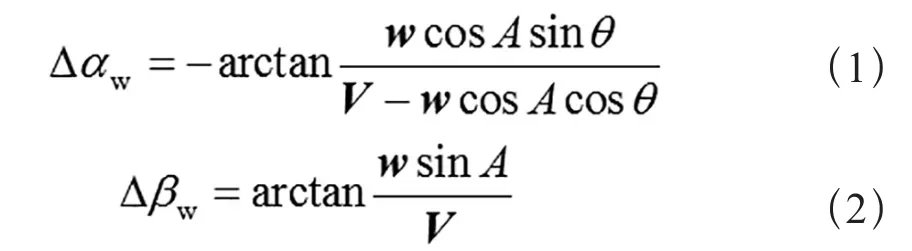
式中 Δαw和Δβw分别为风干扰引起的附加攻角和附加侧滑角;θ为弹道倾角;V为飞行器速矢量;A为风速方向和射面的夹角;ω为风速矢量。并且目前的工程经验认为在水平风的所有方向中,最大侧滑角发生在风速与射面垂直的情况,即A=±π/2的情况。
对于传统的简化式(1)和式(2),其被广泛采用的主要原因是服从于火箭运动方程简化的目的,即把多维非线性空间小扰动运动分解为互相独立的平面运动,即纵向扰动运动和侧向扰动运动,使问题变得容易求解。同时火箭有一个对称面,在客观上存在着运动方程简化的可能性。所以传统的附加攻角和附加侧滑角的简化计算公式有它存在的必要性。
客观上,作为传统经验的式(1)和式(2)只是近似公式,具有特定的适用范围,超过该范围后误差可能难以接受(例如在火箭起飞段,风速与火箭速度非常接近情况下)。式(1)只适用于零倾侧角飞行的情况,式(2)只适用与零倾侧角飞行并且风速远小于飞行器地速的情况,大倾侧角或风速较大的情况下,式(1)和式(2)误差较大,具体参见2.2节算例。同样,在大倾侧角或风速较大情况下,工程经验给出的最大侧滑角及其发生条件与实际情况也相差显著,具体参见3.2节算例。
本文给出了飞行器在标称无侧滑飞行基础上受到水平风干扰时的附加攻角和附加侧滑角准确计算公式,比航天领域目前仍在广泛使用的式(1)、式(2)更准确并且应用范围更广;同时在标称无侧滑飞行的前提下,给出了水平风方向任意、倾侧角任意、两者均任意时附加攻角和附加侧滑角最大和最小值计算方法及对应的最值出现条件,也比航天传统工程经验更准确并且应用范围更广。
1 附加攻角和附加侧滑角计算需求
本文研究了飞行器在标称无侧滑(即β=0)飞行的基础上受到水平风干扰时附加攻角、附加侧滑角计算问题和最大附加攻角、最大附加侧滑角确定,具体如下:
a) 给 定V、θ、ν、α、ω和A,计 算ΔαW和ΔβW;
b)A任意,给定V、θ、ν、α和ω,确定ΔαW和ΔβW的最大值和对应的A;
c)V任意,给定V、θ、α、ω和A,确定ΔαW和ΔβW的最大值和对应的ν;
d)A、ν均任意,给定V、θ、α和ω,确定ΔαW和ΔβW的最大值和对应的A和ν。
附加攻角和附加侧滑角计算需求意义为:a)标称零侧滑飞行状态和风矢量均确定情况下的附加攻角和附加侧滑角计算;b)飞行器无明显姿态机动进行稳定的标称无侧滑飞行的条件下不确定的风向可能产生的最恶劣影响;c)飞行器在进行标称无侧滑快速倾侧机动的过程中确定的风矢量可能产生的最恶劣影响;d)飞行器在进行标称无侧滑快速倾侧机动过程中不确定的风向可能产生的最恶劣影响。实际工程中沿飞行剖面的风向是否确定取决于沿途风场本身特点以及飞行器任务具有单一性还是呈现多样性。
本文中的风向与射面的夹角A定义为飞行器地速矢量与风矢量之间的夹角(见图1),即:

式中 σw为风向角;σ为弹道偏角。
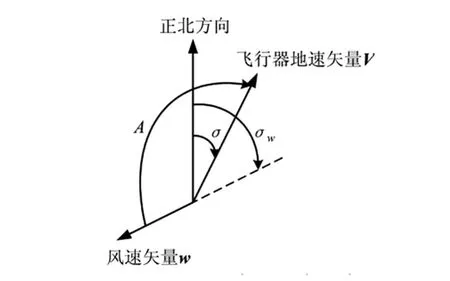
图1 风向与射面夹角示意
2 飞行状态下附加攻角和附加侧滑角计算
2.1 附加攻角和附加侧滑角计算
根据半速度坐标系的定义[2]以及夹角A的定义可知,水平风的风速在半速度坐标系中的矢量描述为

式中 上标(H)为矢量在半速度坐标系中描述。进一步由半速度系到飞行器体坐标系的转换关系[2]可得风速在体坐标系中为

式中 上标(b)为矢量在体坐标系中描述。
从而风干扰影响下飞行器的空速在体坐标系中的描述,即:

式中 V(b)=[VxVv0]飞行器地速在体坐标系中的分量。根据从速度坐标系到飞行器本体坐标系的转换关系[2],在标称零侧滑(β=0)飞行状态下,有:

标称攻角α满足:

有风干扰时,攻角αw和侧滑角βw满足[2]:

式中 VT为空速VT的大小。
由式(8)和式(9)可得,风引起的附加攻角Δαw满足:

结合式(5)和式(11),并经过整理可得:

式(12)中κ=ω/V为风速大小与飞行器地速大小的比值。
由式(10)得风引起的附加侧滑角Δβw满足:

式(12)和(13)即为飞行器标称零侧滑飞行状态和水平风矢量均确定情况下附加攻角和附加侧滑角的准确计算公式。
当时式1+κ2-2κcosAcosθ=0(13)无意义,1+κ2-2κcosAcosθ=0而等价于风速与飞行器地速矢量重合,且合成后的飞行器空速为0,此时讨论攻角和侧滑角没有意义,因此本文不考虑这种情况。同时,本文也不考虑κcosθ≥1(即风速可能使飞行器空速与地速反向)的异常情况,这种情况一般只可能发生在飞行器水平起飞初始短暂时间或者水平降落基本结束时。
2.2 与传统工程计算方法对比
由文献[1]给出的传统工程计算公式(1)和本文给出的公式(12)对比可知,当且仅当倾侧角为零时,式(1)与式(12)一致,因此,式(1)只适用于零倾侧角飞行状态。大倾侧角时,式(1)不再适用。(见图3)
由文献[1]给出的传统工程计算公式(2)和本文给出的公式(13)对比可知,当倾侧角为零且飞行器飞行地速远大于风速时,式(2)与(13)近似一致,式(2)为附加侧滑的近似计算公式,式(2)的计算误差随κ的增大而增大(见图2);当倾侧角较大时,式(2)不再适用(见图3)。
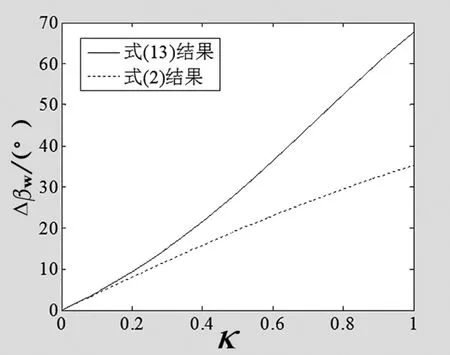
图2 式(2)与式(13)比较结果
图2给出了v=0 rad、θ=0 rad、A=π/4 rad情况下式(2)与(13)的比较。图3给出了v=π/3 rad、θ=0 rad、 A=π/4 rad情况下式(1)和(2)与式(12)、(13)的比较。
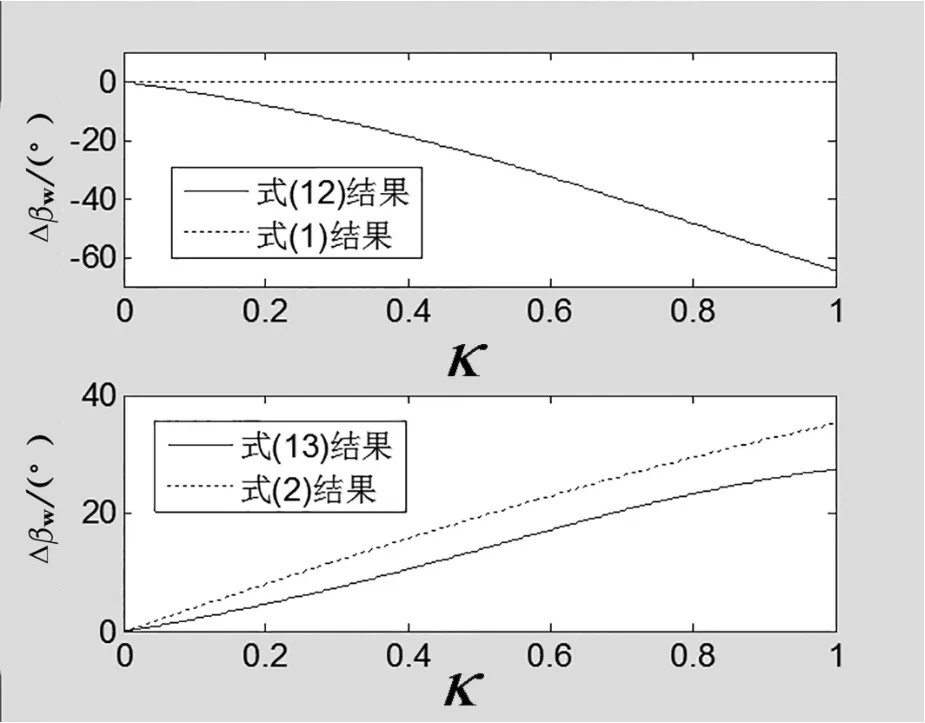
图3 式(2)与式(13)比较结果
综上,本文给出的附加攻角和附加侧滑角计算公式为任意飞行状态下的准确计算公式。而文献[1]给出的附加攻角计算公式为零倾侧角情况下的准确计算公式,只适用于近似零倾侧角飞行情况,大倾侧角时不适用;文献[1]给出的附加侧滑角计算公式为零倾侧角情况下的近似计算公式,只适用于近似零倾侧角且风速远小于飞行器地速的情况。
3 任意水平风向下最大附加攻角和附加侧滑角分析
本节给出飞行器在确定的标称零侧滑飞行基础上受到的水平风向任意时可能产生的附加攻角和附加侧滑角最大、最小值。
3.1 附加攻角最大、最小值分析

由式(14)可得:


式中 A*和v*分别为附加攻角或附加侧滑角取最值时A和V的值。
下面分析式(16)和式(17)对应的Δαw的最大值和最小值。当A*取式(16)时,代入式(12)可得:

故当A*取式(16)时,Δαw*<0为Δαw的最小值。
当A*取式(17)时,代入式(12)可得:

故当A*取式(17)时,Δαw*>0为Δαw的最大值。
在倾侧角为零时,Δαw取最值的条件为A*=0或A*=π与通常的工程经验一致。在倾侧角不为零时,通常的工程经验偏差较大。
3.2 附加侧滑角最大、最小值分析

式(20)为附加侧滑角取最值的条件。
一般情况下式(20)无解析解。当v=0时,式(20)简化为

求解方程(21)可得:

将式(22)代入式(13)可得的最值为

当式(22)右边取“+”号时,式(23)取“+”号,Δβw达到最大值;反之,Δβw达到最小值。
在κ<<1也就是水平风速远小于飞行器地速的情况下,式(22)近似为A*≈±π/2,这与通常的工程经验一致。否则,通常的工程经验偏差较大(如图4、图5所示)。
图4给出了ν=0 rad、θ=0 rad时由式(23)给出的Δβw最大值与由工程经验确定的Δβw最大值A=π/2 rad时式(2)给出的Δβw的值的比较。图5给出了ν=π/3 rad、θ=0.1 rad时由式(23)给出的Δβw最大值与工程经验确定的最大值的比较。
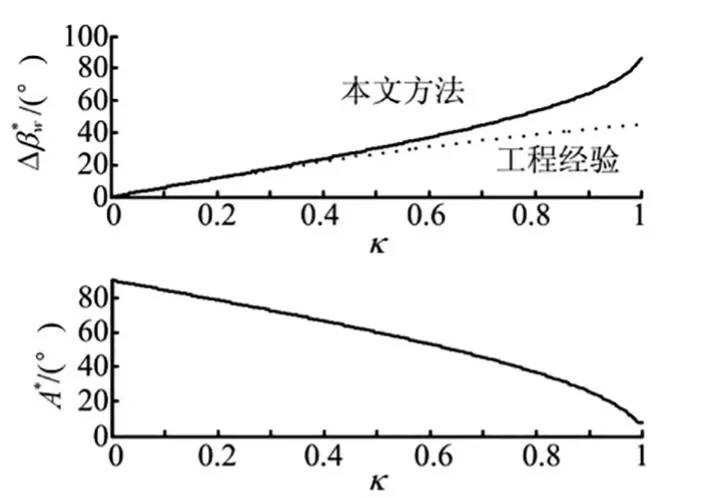
图4 ν=0 rad时本文与工程经验给出的Δβw最大值差别
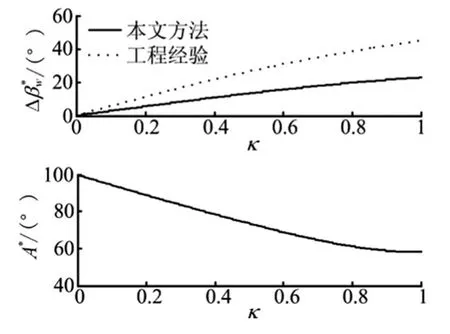
图5 ν=π/3 rad时本文与工程经验给出的Δβw最大值差别
4 任意倾侧角下最大附加攻角和附加侧滑角分析
本节给出确定的水平风矢量下飞行器在标称零侧滑任意倾侧角飞行时可能产生的附加攻角和附加侧滑角最大、最小值。记:

根据式(12)和式(13),并由简单的三角函数知识可得:
a)当:

或:

时附加攻角取得最值,最小、最大值分别为
b)当:

或:

时附加侧滑角取得最值,最大、最小值分别为
5 任意倾侧角和任意水平风向下最大附加攻角和最大附加侧滑角分析
本节给出水平风的方向和飞行器标称零侧滑飞行的倾侧角均任意时可能产生的附加攻角和附加侧滑角最大、最小值。
式(27)、式(28)、式(31)、式(32)描述了风矢量固定、倾侧角任意时附加攻角和附加侧滑角的最值,进一步,式(27)、式(28)、式(31)、式(32)关于风向A的最值即为风向和倾侧角均任意时附加攻角和附加侧滑角的最值。
5.1 附加攻角最大、最小值分析

式(33)存在解A*=0,以及A*=π

式(34)在cosθ≥κ条件时成立。
将A*=0和A*=π代入式(28)检验可知A*=0时Δαw*比A*=π时大,因此下文不考虑A*=π。
当A*=0时,由式(24)、式(25)和式(27)可得:
A*=0时,由式(24)、式(26)和式(28)可得
当A*取式(34)时,由式(24)、式(25)和式(34)可得:
A*取式(34)时,由式(24)、(26)和(34)可得:
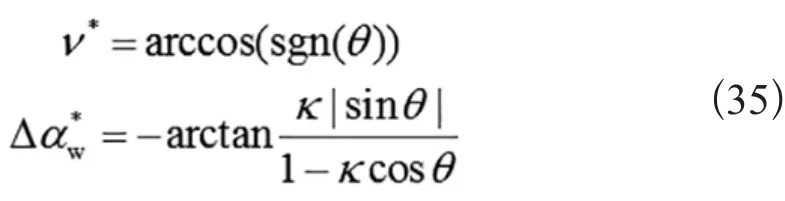
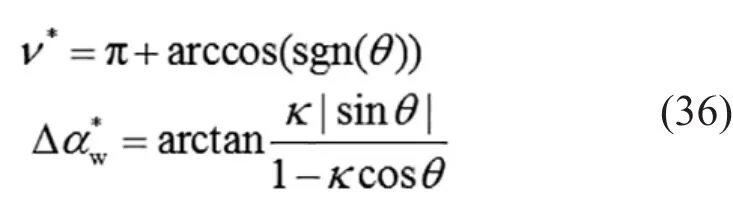
a)若κ>cosθ,则附加攻角最小值按式(35)计算,最大值按式(36)计算;
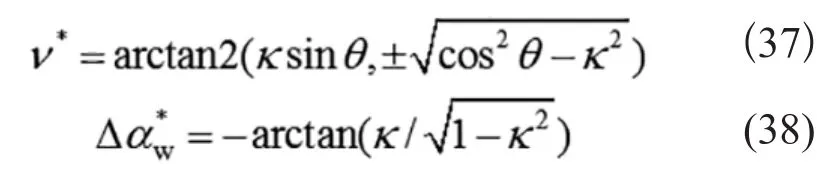
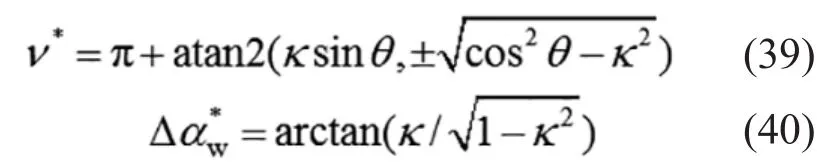
b)若κ≤cosθ,则附加攻角最小值按式(38)计算,最大值按式(40)计算。
5.2 附加侧滑角最大、最小值分析

式(41)存在解A*=0、A*=π和以下解:

式(42)与式(34)一致,在cosθ≥κ条件时成立,式(43)在κcosθ≥1条件时成立,不在本文考虑范围内。
将A*=0和A*=π代入式(31)检验可知A*=0时Δβw
*比A*=π时大,因此下文不考虑A*=π。
当A*=0时,由式(24)、式(29)和式(31)可得:
当A*=0时,由式(24)、(30)和(31)可得:
当A*取式(42)时,由式(24)、(29)和(31)可得:
当A*取式(42)时,由式(24)、(30)和(32)可得:

经简单的代数运算可知:

式(52)中等号成立当且仅当κ=cosθ。综上:
a)若cosθ<κ,则附加侧滑角最大值按式(45)计算,最小值按式(47)计算;
b)若cosθ≥κ,则附加侧滑角最大值按式(49)计算,最小值按式(51)计算。
6 数值验证
本节采用几个特例验证本文方法的正确性。验证方法为把本文公式计算结果与根据恒等关系式(8)~式(10)计算的精确结果进行比较,两种结果一致则说明本文方法正确。
表1给出了随机选取的几组数据下的式(12)、式(13)结果与精确结果的比较。
图6和图7给出了κ=0.1、θ=-0.3 rad、v=0.7 rad情况下风向任意时式(17)、式(19)、式(20)所得ΔαW和ΔβW最大值及出现条件与采用式(8)~(10)精确方法进行数值遍历结果的比较。
图8和图9给出了κ=0.1,θ=-0.3 rad,A=0.7 rad情况下倾侧角任意时式(26)、(28)、(29)、(31)所得Δαw和Δβw最大值及出现条件与采用精确方法进行数值遍历结果的比较。
图10和图11分别给出了κ=0.1、θ=0.3 rad情况下风向和倾侧角任意时式(42)~(51)所得Δαw和Δβw最大值与精确方法数值遍历结果的比较。
图6~图11中,水平虚线与竖直虚线的交点为本文方法所给附加攻角和附加侧滑角的最大值点和最大值大小,实线曲线或曲面为精确方法遍历结果。
由表1可知中精确结果与本文方法结果完全一致,验证了本文方法所给结果与精确结果的一致性。
图1~图6表明3种情况下本文方法给出的附加攻角和附加侧滑角最大值及出现条件与精确方法数值遍历结果均完全一致,因而验证了本文方法给出的3种情况下附加攻角和附加侧滑角最大值及出现条件的正确性。
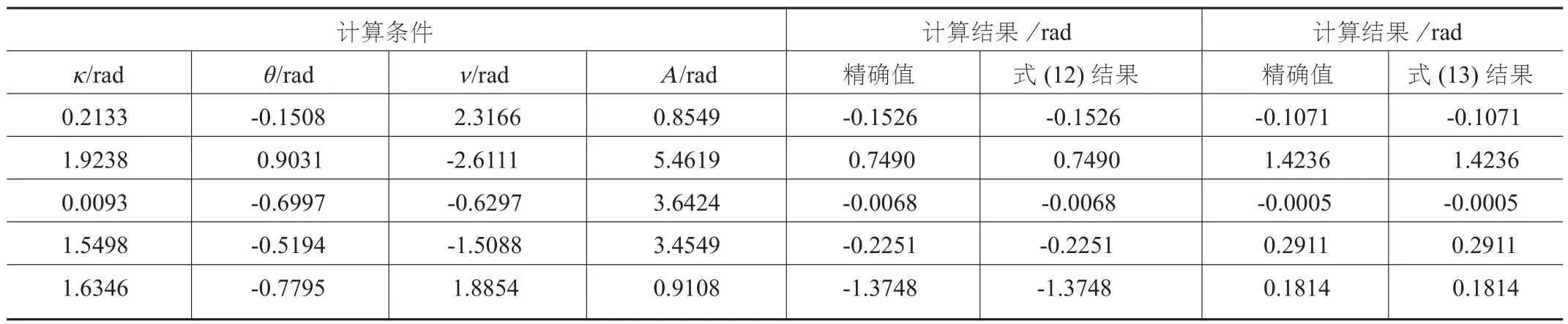
表1 ΔαW和ΔβW精确值与本文方法所给值比较

图6 式(17)、式(19)所给ΔαW最大值与数值遍历结果比较
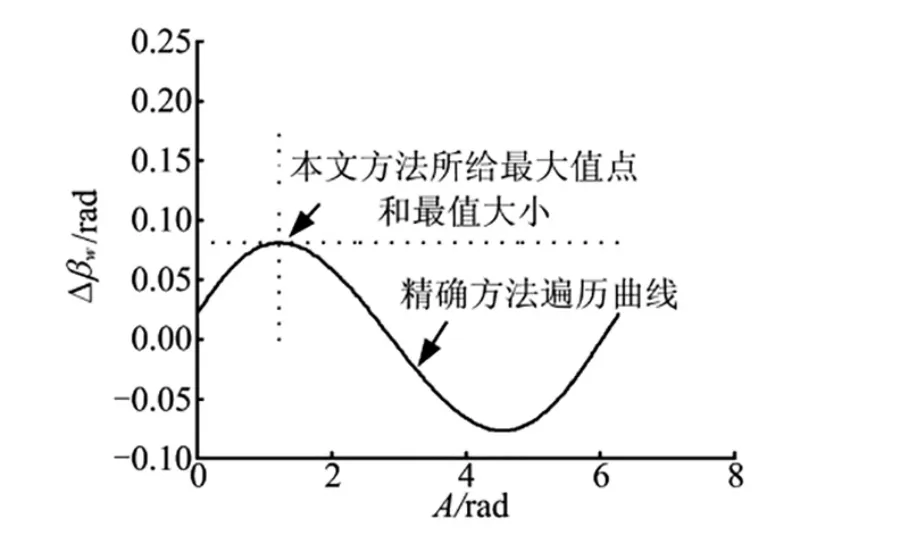
图7 式(20)所给ΔβW最大值与数值遍历结果比较
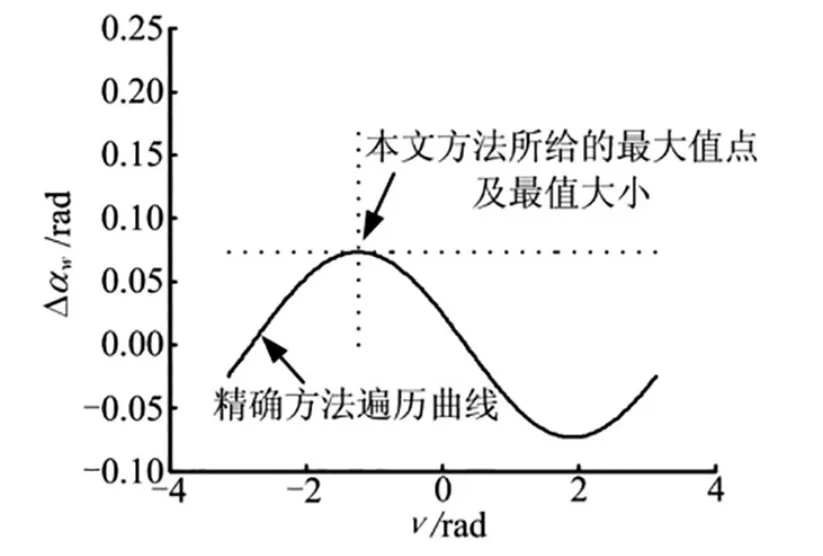
图8 式(26)、式(28)所给ΔαW最大值与数值遍历结果比较

图9 式(29)、式(31)所给ΔβW最大值与数值遍历结果比较
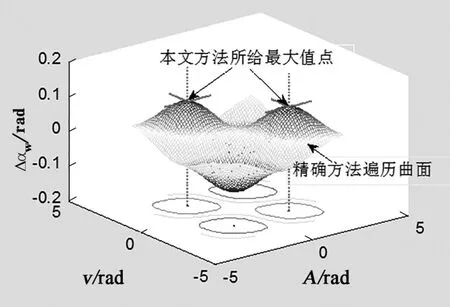
图10 式(34)、(39)、(40)所给ΔαW最大值与数值遍历结果比较
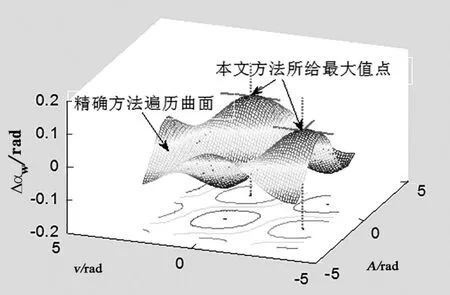
图11 式(42)、(46)、(47)所给ΔβW最大值与数值遍历结果比较
7 结 论
本文研究了水平风干扰下附加攻角和附加侧滑角的计算问题,得到如下结论:
a)给出了确定飞行状态和确定水平风矢量下附加攻角和附加侧滑角的准确计算公式,适用于一般情况,比航天传统计算公式更准确且适用范围更广;
b)给出了水平风方向任意、倾侧角任意、两者均任意时可能产生的附加攻角和附加侧滑角最大、最小值及出现条件,比航天传统工程经验更准确且适用范围更广;
本文结果具有工程实用性,可为传统与运载火箭以及先进高超声速飞行器的总体设计、控制分析和载荷计算等工作提供更准确的输入条件,提高新研制飞行器设计的可靠性和鲁棒性,对于成熟飞行器,可以基于本文结果更准确地评估其安全裕量。
[1] 徐延万. 液体导弹与运载火箭系列——控制系统(上)[M].北京: 中国宇航出版社, 2005.
[2] 赵汉元. 飞行器再入动力学和制导[M].长沙: 国防科技大学出版社, 1997.
[3] 雷旭升, 陶冶. 小型无人机风场扰动自适应控制方法[J]. 航空学报, 2010, 31(6):1171-1176.
[4] Augiar A P, Hespaha J P, Kokotovic P V. Path-following for nonminimum phase systems removes performance limi-tations[J]. IEEE Transactions on Automatic Control, 2005, 50(2):234-239.
[5] Park S, Deyst J, How J P. A new nonlinear guidance logic for trajectory tracking[R]. AIAA-2004-4900,2004.
[6] 刘刚, 王行仁, 贾荣珍. 综合自然环境中变化风场的工程仿真方法[J]. 系统仿真学报, 2006, 18(2): 297-300.
[7] 胡孟权, 张登成, 董彦非等. 高等大气飞行力学[M].北京: 航空工业出版社, 2007.
[8] 彭腾飞. 重复使用运载器无动力自动着陆与制导技术研究[D].南京航空航天大学硕士学位论文, 2013.
Calculation of the Additional Attack Angle and the Additional Sideslip Angle of Craft Caused by Wind Disturbance
Li Zheng-xue1, He Yuan-jun2, Zhang Guang-chun1, Li Jie-qi1, Zhang Yong1
(1. Research and Development Center, China Academy of Launch Vehicle Technology, Beijing, 100076; 2. China Manned Space Agency, Beijing, 100720)
This paper studies the method of calculating additional attack angle and additional sideslip angle caused by wind disturbance based on zero-sideslip nominal flight. The results in this paper are perfect over the simplified formulae widely used in China aerospace engineering. Formulae are given for calculating additional angle of attack and additional sideslip angle for given zero-sideslip nominal flight state and wind disturbance. Formulae about the maximum and the minimum values of additional angle of attack and additional sideslip angle under different conditions are also given. These results are more accurate and more widely used than the traditional method and the engineering experience. Numerical results verified the correctness of the results. Results in this paper can be used for more properly determining inputs of other works during vehicle design, thus improving reliability and robustness of new vehicle. For vehicles in use, the results can also help in evaluating security margins more accurately.
Wind disturbance; Additional attack angl; Additional sideslip angle
V414.33
A
1004-7182(2016)05-0066-08
10.7654/j.issn.1004-7182.20160515
2014-12-12;
2015-06-01
李争学(1979-),男,高级工程师,主要研究方向为飞行器动力学与姿态控制
