基于位置-力矩混合方法的线控转向系统双向控制*
2016-03-30杨莉吴晓东许敏叶昌
杨莉 吴晓东 许敏 叶昌
(上海交通大学汽车电子控制技术国家工程实验室,上海200240)
基于位置-力矩混合方法的线控转向系统双向控制*
杨莉吴晓东许敏叶昌
(上海交通大学汽车电子控制技术国家工程实验室,上海200240)
【摘要】以汽车线控转向系统为研究对象,详细分析了其结构组成和工作原理,建立了系统的闭环控制模型。在双向控制算法基础上,提出一种基于位置-力矩混合方法的线控转向系统双向控制算法,利用快速原型开发设备A&D5435搭建了硬件在环仿真试验平台,并通过MATLAB/Simulink完成了软件开发。对线控转向系统响应速度、跟随效果的测试结果表明,该控制策略有效。
1 前言
目前,针对线控转向系统的控制策略,国内、外研究机构开展了大量的研究工作。杨胜兵[1]提出了线控转向系统变结构模糊变传动比控制和路感函数多变量模糊控制,通过ADAMS、Matlab对其进行仿真研究。王祥[2]建立了线控转向系统双向控制模型,研究线控转向系统的变传动比特性。文献[3]~文献[5]分别采用模糊逻辑控制器、侧倾稳态控制方法和基于模型的自适应参考策略实现了线控转向系统的主动控制。Manh Tuan Do等人[6]通过鲁棒滑模学习控制方法实现了线控转向稳态闭环控制。Abhijit Baviskar等人[7]提出一种非线性线控转向控制器,利用车轮与路面反作用力的线性关系得到可调的反馈力,同时设计了状态观测器,并对参数不确定性进行补偿控制。Tong-Jin Park等人[8]建立了线控转向硬件在环测试台架,利用滑模控制器实现控制逻辑。在进行转向轮转角控制及转向盘力矩控制时,大多数线控转向控制策略需要对转向阻力进行测量或估计,这就要求加装价格很高的力矩传感器或精度较高的阻力观测器,由此增加了控制算法的复杂程度,也提高了系统生产应用成本。与一般控制策略不同,本文提出一种基于位置—力矩方法的双向控制算法,以实现转向并模拟道路阻力,无需加装测量道路阻力的力矩传感器。
2 基于位置-力矩混合方法的双向控制算法
2.1线控转向系统的数学模型
本文所设计的线控转向系统结构如图1所示,包括转向盘子系统和转向前轮子系统两部分。其中,转向盘子系统主要由转向盘、力矩传感器、角度传感器和力感反馈电机组成,功能是感受驾驶员的转向意图并实时模拟路感;转向前轮子系统包括角度传感器、转向前轮和转向电机等,功能是执行驾驶员的转向指令,同时向转向盘子系统反馈转向前轮所受的道路阻力信息。
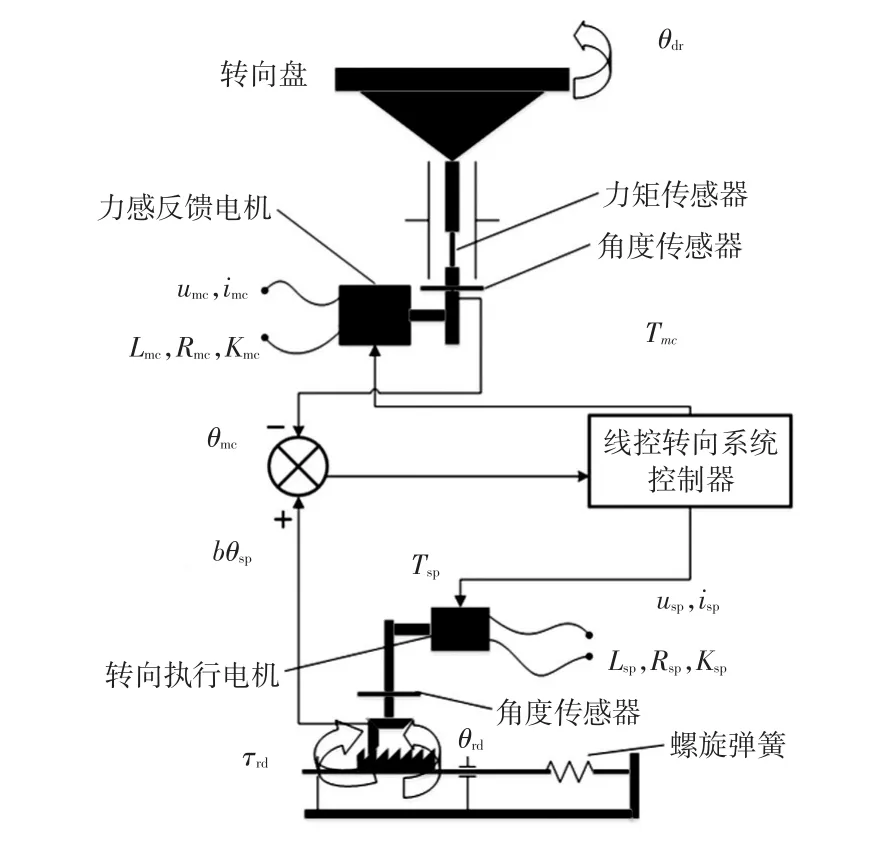
图1 线控转向系统结构
驾驶员与转向盘子系统间的动力学模型如式(1)所示:

式中,Tdr为驾驶员输入在转向盘上的力矩;Ttr为扭杆力矩;θdr为转向盘转角;Jtr_1和Ctr_1分别为扭杆上端的等效转动惯量和阻尼。
转向盘子系统的动态方程为:
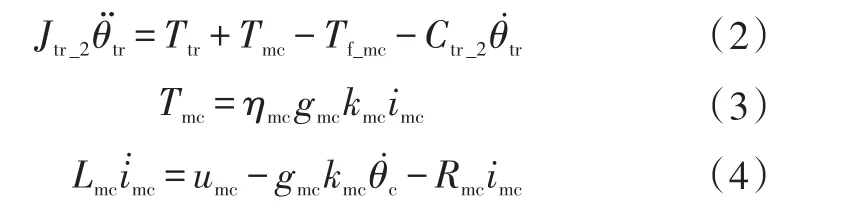
式中,θtr、θc分别为转向扭杆转角和力感反馈电机转角;Jtr_2和Ctr_2分别为扭杆下端的等效转动惯量和阻尼;Tf_mc为转向盘子系统的库伦摩擦力矩;ηmc、gmc、kmc、imc、umc、Rmc、Lmc和Tmc分别为力感反馈电机的运行效率、减速器速比、力矩常数、电流、电枢电压、电阻、电感和电机力矩。
对于模型或实际系统的库伦摩擦力矩方向一般通过转速的符号函数或饱和函数来表示,本文假设转向盘子系统的库伦摩擦力矩方向通过角速度的符号函数得到:

式中,Tfriction_mc为转向盘子系统的库伦摩擦力常数;λmc为主动电机角速度调整系数;θ̇mc为力感反馈电机转角速度。
转向前轮子系统的动力学模型如下:
式中,Jrp、Crp分别为齿轮齿条机构的等效转动惯量和阻尼;θrp、θw分别为齿轮齿条机构转角和转向前轮转角;τrd为等效在齿轮齿条机构上的道路阻力(包括转向阻力和回正力矩);Tf_sp为转向前轮子系统的库伦摩擦力矩;ηsp、gsp、ksp、isp、usp、Rsp、Lsp和Tsp分别为转向执行电机的运行效率、减速器速比、力矩常数、电流、电枢电压、电阻、电感和电机力矩。
转向前轮子系统等效在小齿轮轴上的库伦摩擦力矩方向通过转向执行电机转速的符号函数来表示:

式中,Tfriction_sp为转向前轮子系统的库伦摩擦力常数;λsp为从动电机角速度调整系数。
2.2基于位置-力矩的双向控制算法
线控转向系统的控制结构如图2所示,其中Tfd_mc和Tfd_sp分别为转向盘子系统和转向前轮子系统与系统本身特性相关的前馈力矩。该结构采用以转向盘为“主”,转向前轮为“从”的控制思想:转向盘模块采用位置-力矩闭环控制,控制目标为转向执行电机与力感反馈电机的转角差,状态反馈为力感反馈电机的转角,通过减小角度差,使驾驶员能感受到与行驶路况相对应的力感;转向前轮模块以力矩控制为主,辅以位置-力矩闭环控制,控制目标为转向盘转角与转向执行电机的转角差,状态反馈为转向执行电机的转角,通过减小目标输入角度与实际转向角之间的角度差,使转向系统跟随期望转向角。两者共同实现了线控转向系统转向盘与转向前轮之间的基于位置-力矩的双向控制。
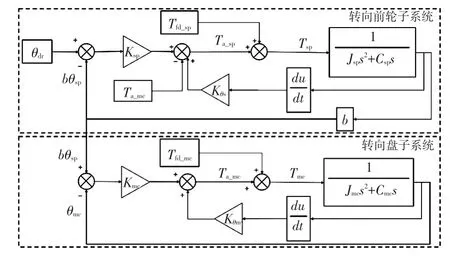
图2 基于位置-力矩双向控制算法的线控转向闭环控制系统
2.2.1转向盘子系统控制算法
转向盘子系统目标控制力矩由力感反馈电机和转向执行电机的转角差与角度差增益之积及力感反馈电机的角速度与角速度增益的线性关系得到。
相对于机械或液压转向系统,线控转向系统减少了机械连接件及液压系统,增加了主从电机及其减速机构,其惯量及阻尼对转向系统控制精度产生影响。为了提高控制精度,在转向盘子系统控制方程设计中需考虑因电机惯量及阻尼所消耗的力矩。系统的惯量、阻尼等通过参数辨识的方法得到。
因此,主动电机的动力学方程如下:

式中,Tα_mc为主动电机的目标输出力矩;Jmc和Cmc分别为转向盘子系统中力感反馈电机的转动惯量及阻尼;θ̈mc为力感反馈电机的角加速度。
其中,转向盘子系统的前馈力矩为:

主动电机目标输出力矩为:

式中,Kmc和Kθm分别为主动电机的角度差增益系数及角速度的增益系数;θsp和θmc分别为转向执行电机转角和力感反馈电机转角;b为转向盘到转向前轮执行电机的角传动比。
该方法通过角度差和角速度信号得到力感反馈电机的目标输出力矩,当转向角度增大使转向回正力矩增大,或转向时遇到障碍物使转向阻力增大时,θsp增大速度变小,角度差增大,力感反馈电机给转向盘的反向输出力矩增大,驾驶员所感受到的力感也增大,符合车辆转向时的力感设计需求。
2.2.2转向前轮子系统控制算法
从动电机驱动齿轮齿条转向器跟随转向盘的转角,并将小齿轮的实际转角发送到转向盘子系统,其目标控制力矩由转向盘模块产生的模拟路感的阻力矩、转向盘转角与转向执行电机的实际转角差及其角度差增益以及转向执行电机的角速度和角速度增益的线性关系得到。
因此,从动电机的动力学方程为:

式中,Tα_sp为从动电机的目标输出力矩;Jsp和Csp分别为转向前轮子系统中执行电机的转动惯量及阻尼。
其中,转向前轮子系统的前馈力矩为:

从动电机的目标输出力矩如式(15):

式中,Ksp和Kθs分别为从动电机角度差增益系数和角速度增益系数。
转向时,转向阻力通过主动电机模拟得到,并将其传递到从动电机,作为从动电机主要目标输出力矩,使其克服转向阻力;将转向盘转角和转向执行电机转角的转角差及角速度的线性关系得到的力矩作为从动电机目标力矩的补偿力矩,提高从动电机跟随转向盘转角的速度,使其快速实现目标转向。当转向角度增大或转向遇到障碍物时,转向阻力增大,θsp的跟随速度减慢,角度差增大,力感电机的目标输出力矩增大,进而传递给转向执行电机的目标输出力矩也增大,执行电机输出电流增大,使θsp能够跟随转向盘的目标转向角度。
3 线控转向系统试验平台
本文基于快速原型开发设备A&D5435建立了线控转向系统硬件在环试验平台,由快速原型开发设备A&D5435、转向盘模块、转向前轮模块、计算机、人机交互界面和电源等组成。蓄电池给电机驱动电路提供12 V电源,电机驱动电路为传感器提供5 V电源。
目前国内外线控转向系统试验平台中用于模拟阻力的系统大致分为弹簧加载式、千斤顶式、磁粉制动器加载式、电液伺服式及电机加载式阻力模拟系统5类[9]。本文采用螺旋弹簧式阻力模拟系统,其结构简单、成本低,并能够满足前文所建立的动力学系统模型。在转向横拉杆左端安装了螺旋弹簧,用以模拟转向时车轮与路面间的阻力;右端是自由端,模拟在无载荷工况下的转向试验。试验过程设定转向盘向左转为正向。
利用MATLAB/Simulink与A&D5435搭建控制模型的过程如图3所示。
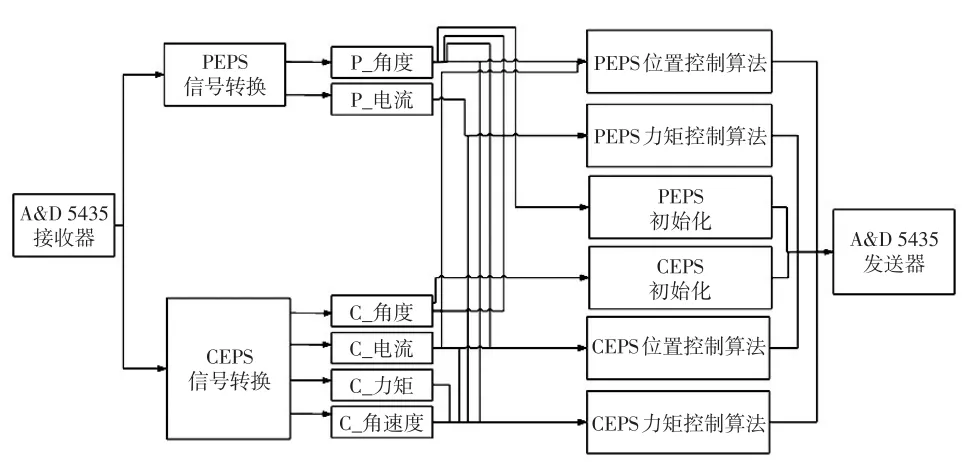
图3 MATLAB模型与A&D5435模型控制示意
转向盘子系统,即主动机构,采用转向柱式电动助力转向(Column-type Electrical Power Steering,CEPS)系统作为执行机构。而转向前轮子系统,即从动机构,采用齿轮式电动助力转向(Pinion-type Electrical Power Steer⁃ing,PEPS)系统作为执行机构。CEPS和PEPS系统的电机均为永磁同步电机。通过CEPS端的角度传感器和力矩传感器分别测得转向盘的角度信号和力矩信号,通过PEPS端的角度传感器测得齿轮齿条转向器的转角信号。
CEPS与PEPS系统的主要参数性能见表1,传感器参数见表2。
4 结果与分析
为验证本文提出的基于位置-力矩双向控制算法的性能,进行了无负载工况和有负载工况下的硬件在环试验。驾驶员进行试验时,以自己感觉最舒适的速度操纵转向盘,模拟正弦角度输入和斜坡角度输入。试验过程中,为简化模型多参数调节的复杂度,将可变参数角传动比b置为1。
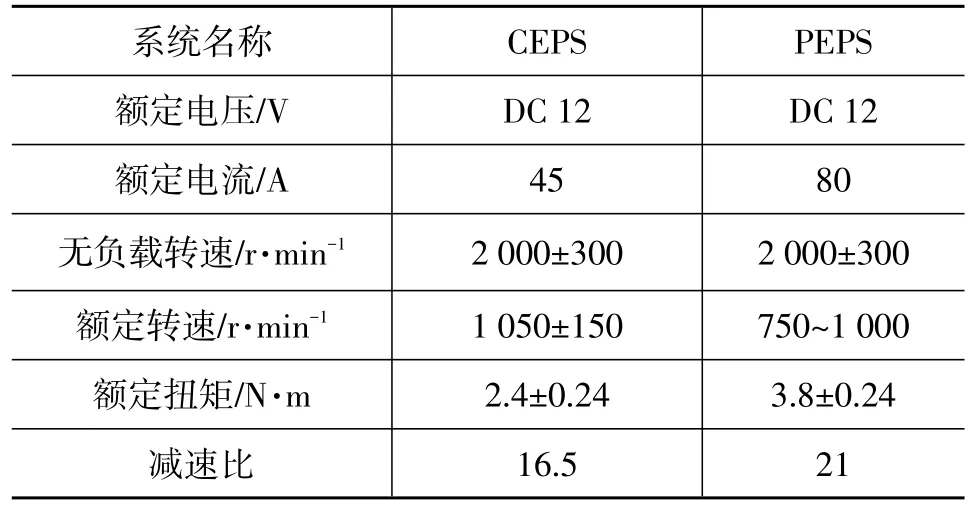
表1 CEPS与PEPS系统电机性能参数
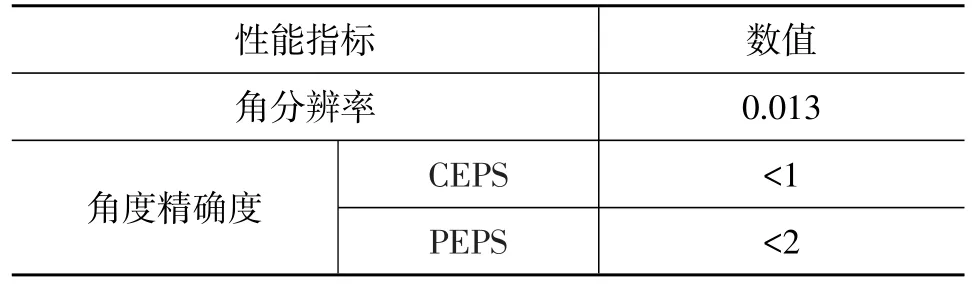
表2 传感器参数 (°)
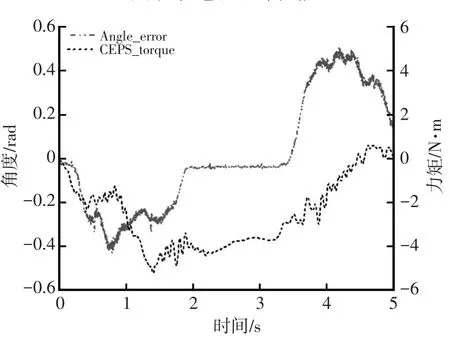
图4和图5为无负载工况下的试验结果。图6和图7为有负载工况下的试验结果。其中,CEPS_angle代表目标转向角度,PEPS_angle代表齿轮齿条机构的实际转向角度,目标角度与实际角度之间的角度差用An⁃gle_error表示,作用在转向柱上的反馈力矩用CEPS_torque表示。
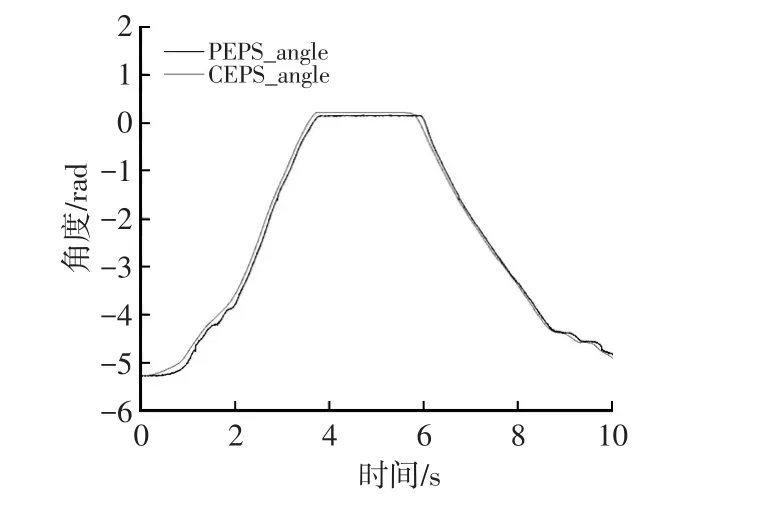
(a)从动电机跟踪性能
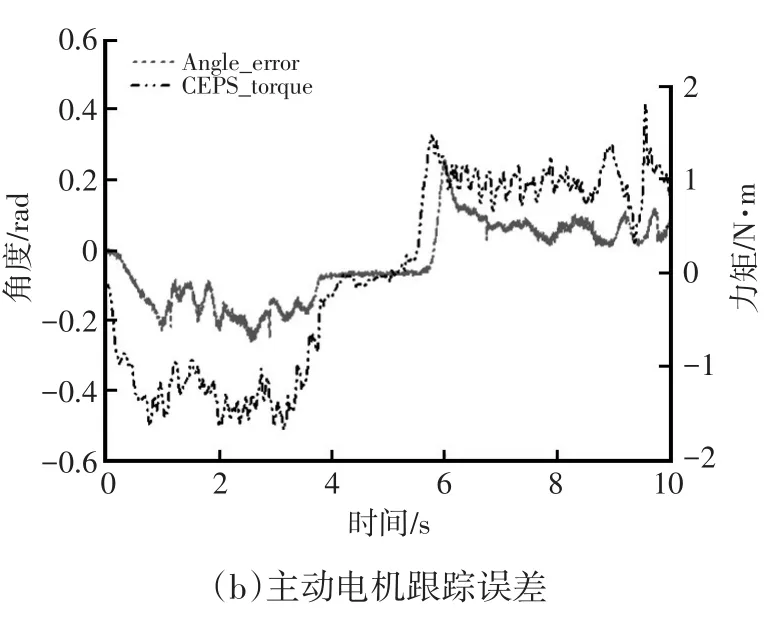
图4 无负载工况斜坡输入下的试验结果
从图4a和图5a试验结果可知,在空载工况下,采用斜坡输入或正弦输入,从动电机PEPS均能很好的跟随主动电机CEPS,系统运行平稳。从图4b和图5b试验结果可以看出,在无负载工况下,转向力感几乎为零,符合驾驶员在车辆转向空载时的手感。
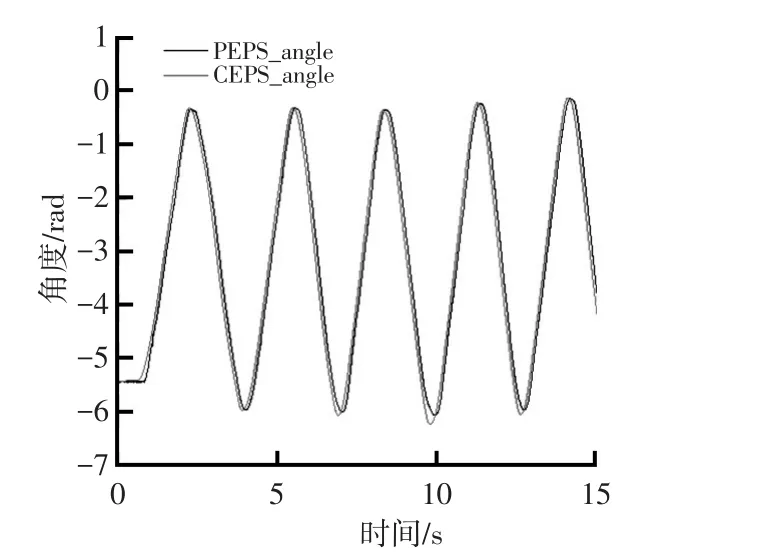
(a)从动电机跟踪性能
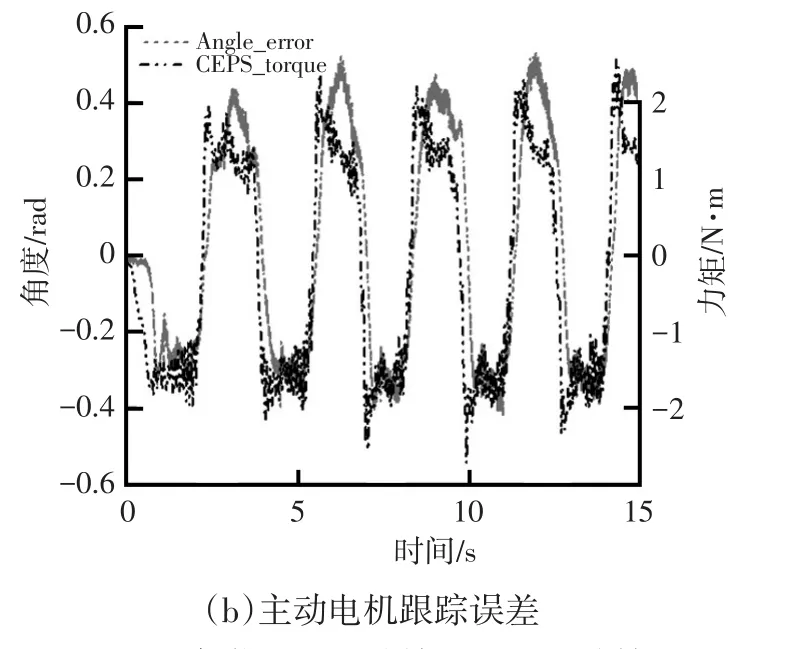
图5 无负载工况正弦输入下的试验结果
(a)从动电机跟踪性能
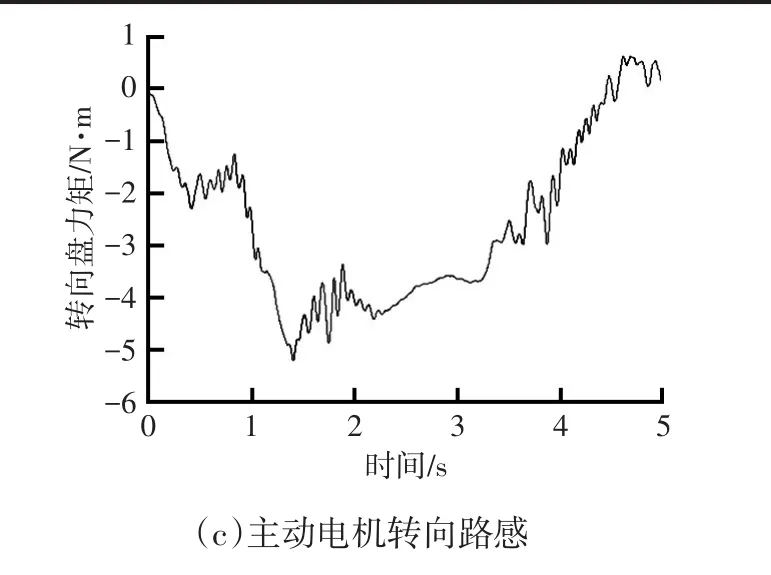
图6 有负载工况斜坡输入下的试验结果
图7 有负载工况正弦输入下的试验结果
由于仅在试验台架的单侧安装了用于模拟道路阻力的螺旋弹簧,在试验过程中,为了使转向现象清晰可观,操作者需从离中心转向位置较远的一侧进行转向,因此在图4a和图5a中,转向角度在初始时刻并不等于零,而由于初始时刻的角度差及角速度为零,在图4b和图5b中其所对应的转向力矩为零。同理可见带负载工况的试验结果。
由图6a和图7a可知,线控转向系统能够实现很好的跟随性能,系统响应速度快且运行平稳。由图6b与7b可以看出,转向盘电机输出力矩与所设计的理论计算值变化规律一致,随转角差的变化而变化,当转角差达到峰值时,该力矩值也达到峰值。由图6c与7c可见,转向盘力矩与转角变化趋势一致,当转向角度增大时,手感的力矩值也随之增大,力感清晰,其值在有负载工况下远大于无负载工况下。
相对于空载工况,转向系统在有负载工况下的跟随误差增大,这是由于电机在不同转矩和转速下,其工作效率不同,为简化计算,本文采用同一电机效率。从空载和有负载工况试验结果可以看出,所设计的控制策略能够使该转向试验台架在运行时间内实现跟随转向并反馈力感的功能,工作状态稳定。
5 结束语
本文基于线控转向双向控制,提出基于位置-力矩的控制算法,通过对力感电机和转向执行电机的精确控制,完成了驾驶员的期望转向指令及道路力感反馈的研究目标。在所搭建的A&D5435硬件在环试验台架上,对转向盘子系统力感反馈及转向前轮子系统的跟随性进行了验证,试验结果表明,转向盘力感清晰,转向前轮的跟随性能良好,控制效果理想。
该方法通过位置差及转向阻力矩计算得到转向执行电机的目标输出力矩,省去了用于测量道路阻力的力矩传感器,在保证系统稳定运转的基础上降低了系统生产应用成本。
本文未考虑到全部工况,如未考虑车辆在不同车速下的运行工况,未考虑角传动比变化所引起的力感不同等。在后续研究中,应该在本文研究基础上实现各种驾驶工况下的准确跟随及力感反馈,再经过严格的硬件在环测试后,将该线控转向系统进行装车试验。
参考文献
1杨胜兵.线控转向系统控制策略研究:[学位论文].武汉:武汉理工大学, 2008.
2王祥.线控转向系统双向控制及变传动比特性研究:[学位论文].长春:吉林大学,2013.
3Huh K., Seo C., Kim J., Hong D. Active steering control based on the estimated tire forces, American Control Confer⁃ence, 1999, 1: 729~733.
4OH S W., Chae H C., Yun S C., Han C S. The design of a controller for the steer-by-wire system, JSME International journal, 2004, 47(3): 896~907.
5 Fukao T., Miyasaka S., Mori K., Adachi N., Osuka K. Active steering systems based on model reference adaptive nonlin⁃ear control, Intelligent Transportation Systems, 2004, 42 (5): 301~318.
6 Do M T., Man Z., Zhang C., Wang H., Tay F S. Robust Slid⁃ing Mode-Based Learning Control for Steer-by-Wire Sys⁃tems in Modern Vehicles, IEEE Transactions on Vehicular Technology, 2014, 63(2): 580~590.
7Baviskar A., Wagner J R., Dawson D M., Braganza D., Set⁃lur P. An Adjustable Steer- by- Wire Haptic- Interface Tracking Controller for Ground Vehicles, IEEE Transac⁃ tions on Vehicular Technology, 2009, 58(2): 546~554.
8Park T J., Han C S., Lee S H. Development of the electronic control unit for the rack-actuating steer-by-wire using the hardware- in- the- loop simulation system, Mechatronics, 2005, 15(8): 899~918.
9王帅.线控转向阻力模拟系统研究及其试验台设计:[学位论文].武汉:武汉理工大学, 2013.
(责任编辑帘青)
修改稿收到日期为2015年12月1日。
Bilateral Control of Steer-by-wire System by Position-Torque Hybrid Approach
Yang Li, Wu Xiaodong, Xu Min, Ye Chang
(National Engineering Laboratory for Automotive Electronic Control Technology,Shanghai Jiao Tong University, Shanghai 200240)
【Abstract】In this research, the structural composition and working principle of steering-by-wiring system (SBW) are analyzed in details, and the closed-loop control model of the system is established. Then, a novel bilateral control algorithm for SBW system is proposed based on position-torque hybrid approach. Finally, the hardware-in-the-loop experiment platform is developed with the rapid prototyping equipment A&D5435, and software is developed with MATLAB/Simulink. The experiment results show that the novel bilateral control algorithm is effective to respond quickly and follow the steering command accurately.
Key words:Steer- by- wire system, Bilateral control, Position- torque hybrid control, Rapid prototyping
中图分类号:U463.4
文献标识码:A
文章编号:1000-3703(2016)02-0023-05
*基金项目:国家自然科学基金项目“滑移辅助转向下的四轮冗余电驱动车辆分层式力矩协同控制”,基金号:51305259。
主题词:线控转向系统双向控制位置-力矩混合控制快速原型开发