基于Modelica的电动汽车制动系统建模仿真与参数优化*
2016-03-30熊会元1詹爽1于丽敏1周玉山3
熊会元1,2 詹爽1,2 于丽敏1,2 周玉山3
(1.中山大学,广州510006;2.东莞中山大学研究院,广州523808;3.广州汽车集团股份有限公司汽车工程研究院,广州511434)
基于Modelica的电动汽车制动系统建模仿真与参数优化*
熊会元1,2詹爽1,2于丽敏1,2周玉山3
(1.中山大学,广州510006;2.东莞中山大学研究院,广州523808;
3.广州汽车集团股份有限公司汽车工程研究院,广州511434)
【摘要】基于多领域统一建模语言Modelica建立了电动汽车整车模型及真空助力制动系统模型,提出了基于车辆数据采集系统VBOX-3i的测试方法,并通过对电动中巴车的实车路况测试验证了仿真模型的准确性。在此基础上,利用正交试验法对真空助力制动系统参数进行了优化匹配。采用优化匹配参数后,降低了约14.2%的真空制动系统能耗。
1 前言
电动汽车制动系统多为电动真空辅助助力系统,其匹配计算对行车安全非常重要。目前,在制动系统建模仿真方面主要基于传统汽车模型,如文献[1]建立了汽车制动防抱死系统(ABS)电磁阀的多领域模型,分析了ABS电磁阀相关参数对其特性的影响;文献[2]则采用混合建模的方法建立了ABS仿真模型并探讨关键参数对ABS的影响;文献[3]对新型液压混合动力公交汽车的制动性能进行了仿真分析,并进行了台架和实车道路试验。真空助力制动是电动汽车制动的重要方式之一,对真空助力制动系统进行建模仿真,并通过测试验证模型的准确性,可以指导电动汽车真空助力系统参数的设计优化。
汽车真空助力制动系统涉及机械、液压、电气、控制等多个领域,多领域建模仿真是机电产品性能分析与设计优化的关键技术之一。多领域统一建模语言Modeli⁃ca具有面向对象、基于方程和连续离散混合建模的特性,可实现对机、电、液、控等多领域统一建模[4]。为此,建立了电动汽车整车与真空助力制动系统的Modelica模型,并基于正交试验法对制动系统参数进行了仿真试验,获得了助力制动系统的优化参数。
2 系统建模
电动汽车的真空助力制动系统原理如图1所示。在真空助力制动系统模型中,真空压力开关、三通、真空罐和真空泵都集成在真空泵模型,因此需要建立的子模型主要包括真空泵模型、真空助力器模型、制动主缸模型和制动器模型等。

图1 真空助力制动系统原理示意
2.1真空泵模型
根据真空设计手册,低真空区域真空泵抽气速率、抽气时间与气压间存在如下关系[5]:

式中,Sp为真空泵的抽气速率;Kq为修正系数,与设备抽气终止时的压强有关,此处取为1;V为真空罐容积;t为抽气时间;Pi为开始抽气时的压力;P为经过t时间抽气后的压力。
真空泵1个工作循环的功率W[6]为:
式中,m为多变系数,取1.3;Sth为真空泵的几何抽气速率,一般情况下Sth=1.1~1.25SP,本文取Sth=1.2SP;Pin为吸气压力;Pout为排气压力,取101 kPa。
真空泵所需的电机功率Wg[7]为:
式中,Wmax为功率的最大值;ε为真空泵的过载系数,一般取ε=1.2~1.4;ηm为真空泵的机械效率;ηp为真空泵的传动效率;ηd为电机效率。
真空泵模型中还加入了启停真空度的设置,即当真空度低于启动真空度时,开关闭合,真空泵启动工作;当真空度高于停止真空度时,开关断开,真空泵停止工作。
2.2真空助力器模型
根据真空助力器的工作特性,在最大助力点前真空助力器平衡方程为[8]:
式中,F01、F02分别为真空助力器在最大助力点时对应的输入力与输出力;D为助力器膜片有效直径,若采用双膜片真空助力器,则膜片面积为2D2;p为真空助力器的真空度;is为助力比。
真空助力器的助力效果达到最大后,输出力的增大就与输入力的增大相同。因此,不同真空度下真空助力器的输入、输出特性如图2所示。基于该特性,根据驾驶员模型的输入力F01与真空泵模型的真空度,可由真空助力器模型获得输出力F02,作为制动主缸模型输入。
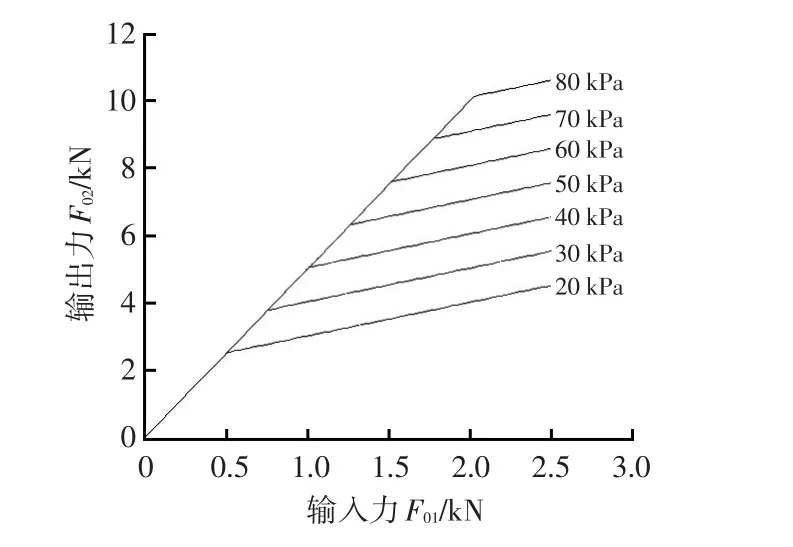
图2 不同真空度下真空助力器输入、输出特性
2.3制动主缸模型
制动主缸的输出压强模型为:

式中,Pm为主缸输出压强;dm为制动主缸直径。
2.4制动器模型
盘式制动器的制动力矩模型为:

式中,Td为盘式制动器的制动力矩;fd为盘式制动器的摩擦因数;Rd为盘式制动器制动块的作用半径;Pm为制动主缸模型的输出压强;dd为盘式制动器制动轮缸直径。
鼓式制动器的制动力矩模型为:

式中,Tp为鼓式制动器的制动力矩;B1、B2为鼓式制动器制动蹄参数;dp为鼓式制动器轮缸直径。
获得制动主缸模型的输出压强后,由制动器模型可求得前、后轮的制动力矩。
2.5系统模型
将建立的真空泵模型、真空助力器模型、制动主缸模型和制动器模型组合得到真空助力系统的仿真模型,如图3所示。
将真空助力制动系统仿真模型与电池、电机、控制器、底盘、传动系模型和驾驶员模型通过标准化的接口进行连接,获得电动公交车整车仿真模型,以实现电信号、机械信号和控制信号的传递及数据处理,如图4所示。用于采集真空泵的工作电压与电流,并输入到VBOX-3i模拟量输入通道。
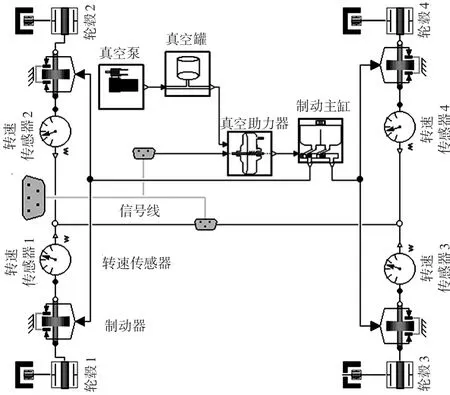
图3 真空助力制动系统modelica模型
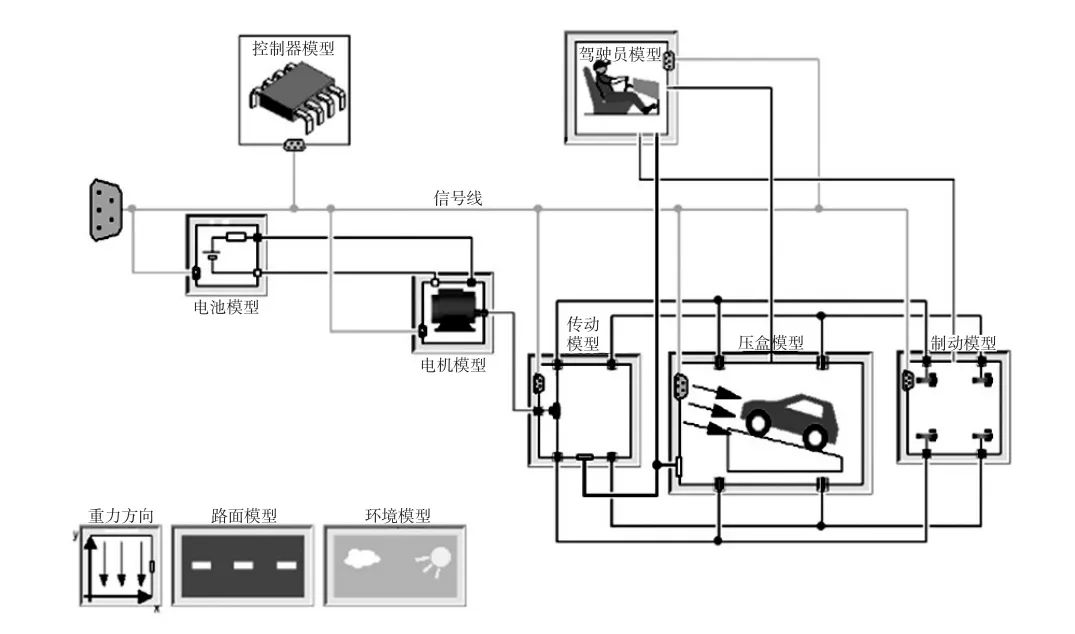
图4 电动公交整车modelica模型
3 模型仿真与验证
为验证所建模型的准确性,设计了基于数据采集系统VBOX-3i的实车测试方案进行测试,并利用测试数据构建仿真模型的运行测试工况,将测试工况导入所建模型中进行仿真,对仿真结果与测试结果进行对比分析。
3.1测试方案
采用FDG6601EVG电动公交车在东莞松山湖4A公交线路上进行测试试验,该线路往返于和堂总部1号与紫檀山之间,途经13个站点,行驶距离为14.1 km,行驶时间为1 853 s,平均车速为27.3 km/h,能量消耗为4.3 kW·h,减速制动32次,真空泵的能耗为11 048.3 J。FDG6601EVG电动公交车技术参数如表1所列。
试验时利用数据采集系统VBOX-3i采集在松山湖4A公交线路上运行时的试验数据,采集原理与方法如图5所示。图5中,VBOX-3i连接车载CAN总线,获得电机驱动系统工作电流、电压、转速扭矩等数据;安装于真空泵输入电源线上的霍尔电流传感器与电压传感器
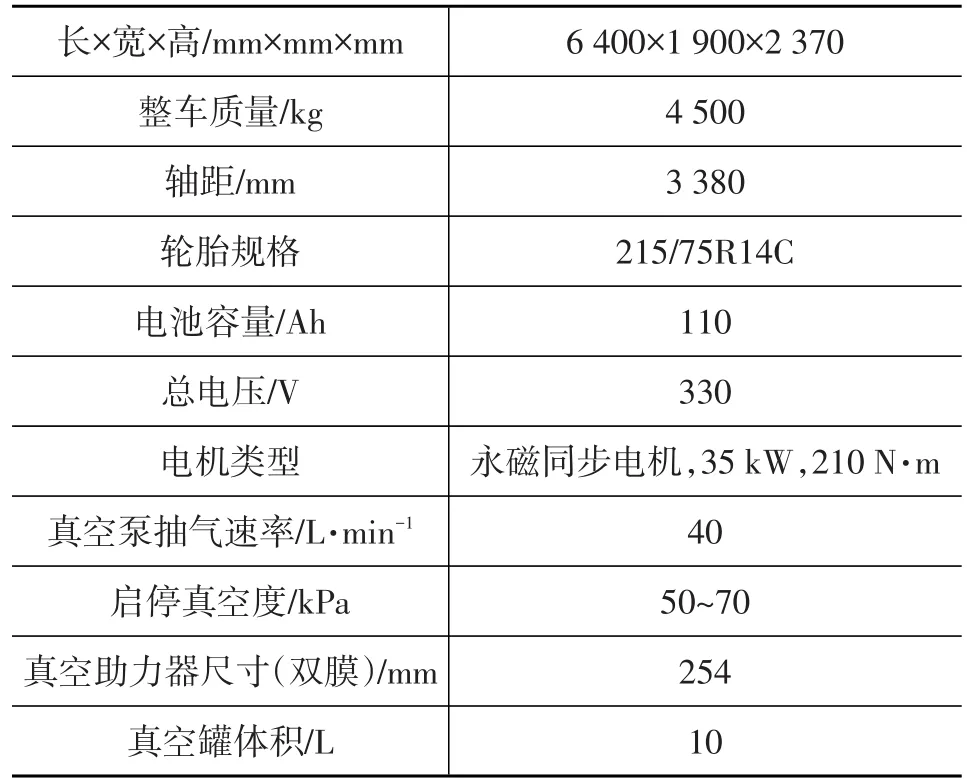
表1 FDG6601EVG 电动公交车主要技术参数
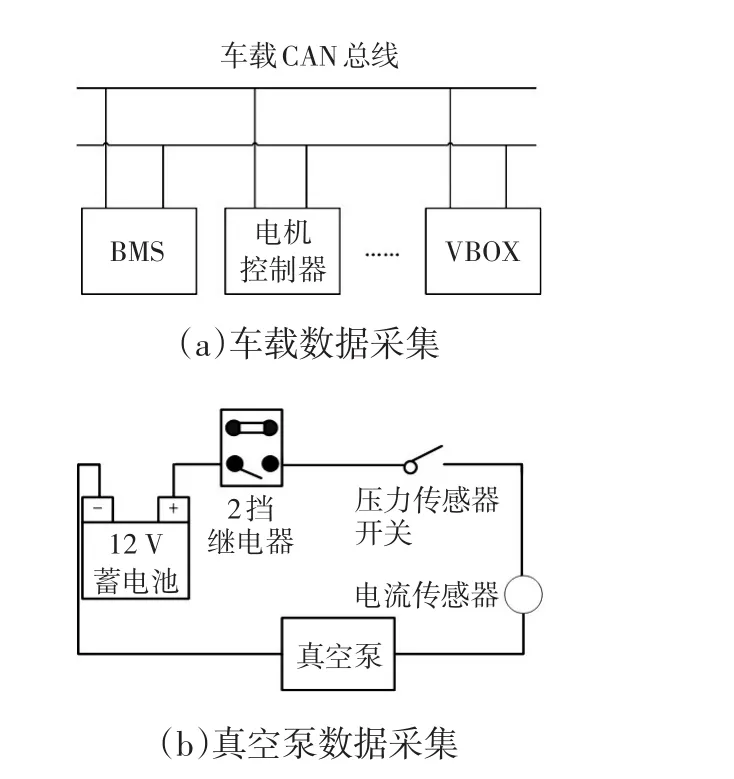
图5 数据采集原理示意
3.2工况获取
由于受路面状况、驾驶员操作行为、周围环境等因素的影响,采集的数据出现了异常点,为此采用卡尔曼滤波对采集的数据进行了消除噪声的平滑处理,并根据文献[9]提出的方法删除了最高车速小于5 km/h和行驶时间少于10 s的数据,按匀加速、匀减速、匀速及怠速等模式对测试数据进行简化处理。简化前、后测试数据对比如表2所列,简化前、后工况如图6所示。

表2 测试数据简化前、后对比结果
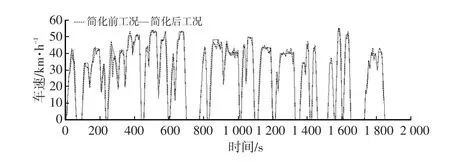
图6 简化前、后工况对比曲线
由表2和图6可知,简化后的工况保留了测试数据大部分工况特征,获得的最高车速、平均车速、行驶距离、怠速时间与测试数据相比,差值的百分比均控制在±5 %[9]以内,能够较好地反映测试工况。
3.3仿真模型验证
对仿真模型进行标定,输入电动公交车各系统参数,导入获得的松山湖4A工况,以工况输入为目标进行车辆跟随仿真,仿真结果如图7所示。由图7可看出,两条曲线完全重合,表明仿真结果很好地跟随了测试工况。
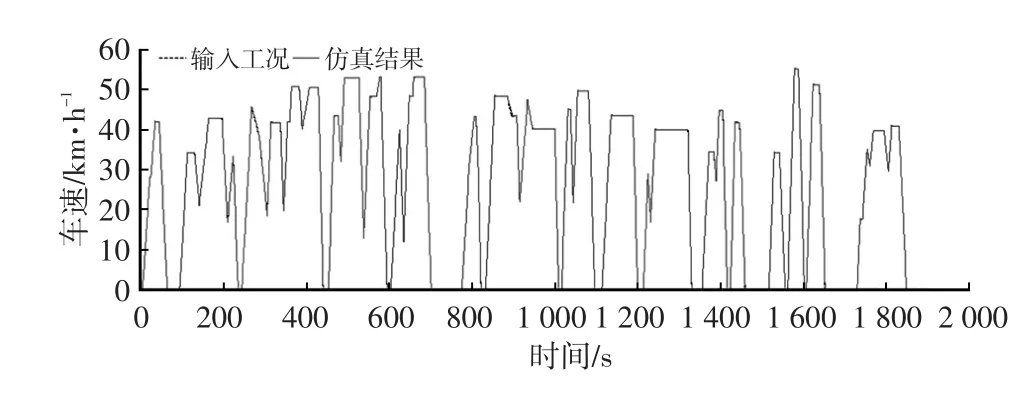
图7 简化工况下的电动公交车跟随仿真结果
在简化工况下真空泵的仿真结果与测试结果对比如图8和表3所示。
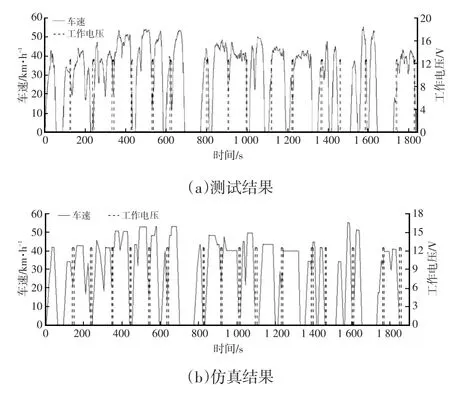
图8 简化工况下真空泵工作情况
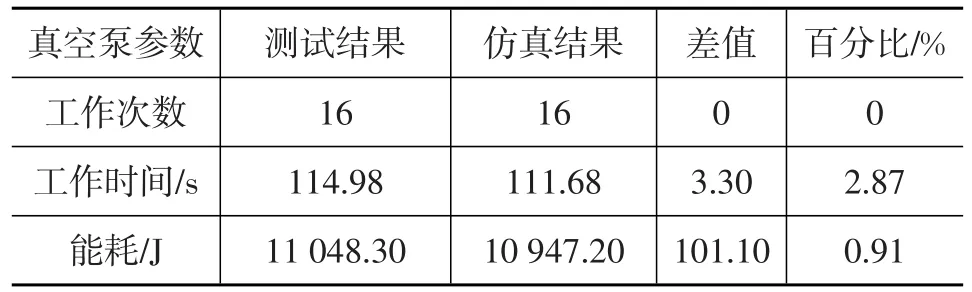
表3 简化工况下真空泵测试结果与仿真结果对比
由图8和表3可知,真空泵在简化工况下的仿真结果与测试结果非常接近,表明仿真模型可以较好地反映电动公交车真空泵的实际工作情况。
4 真空助力制动系统参数优化
真空助力系统的能耗主要来自真空泵,影响真空泵能耗的因素包括真空罐体积、启停真空度和真空泵抽气速率等。其中,真空罐为制动系统提供稳定的真空度,其体积直接影响能耗;由式(2)可知,真空泵的能耗与真空度大小有关,启停真空度的设置也将影响真空泵的能耗;真空泵的抽气速率越大,相同工作状态下的能耗越高。
因真空罐体积、启停真空度和真空泵抽气速率等因素对能耗的影响相互耦合,所以需要进行多目标优化。为此采用正交试验优化方法,以能耗为优化目标,从中选择最优的参数匹配组合。将3个影响因素作为试验因素,每个因素选择4个水平,设计4水平3因素正交表(表4),根据正交表组合进行仿真。
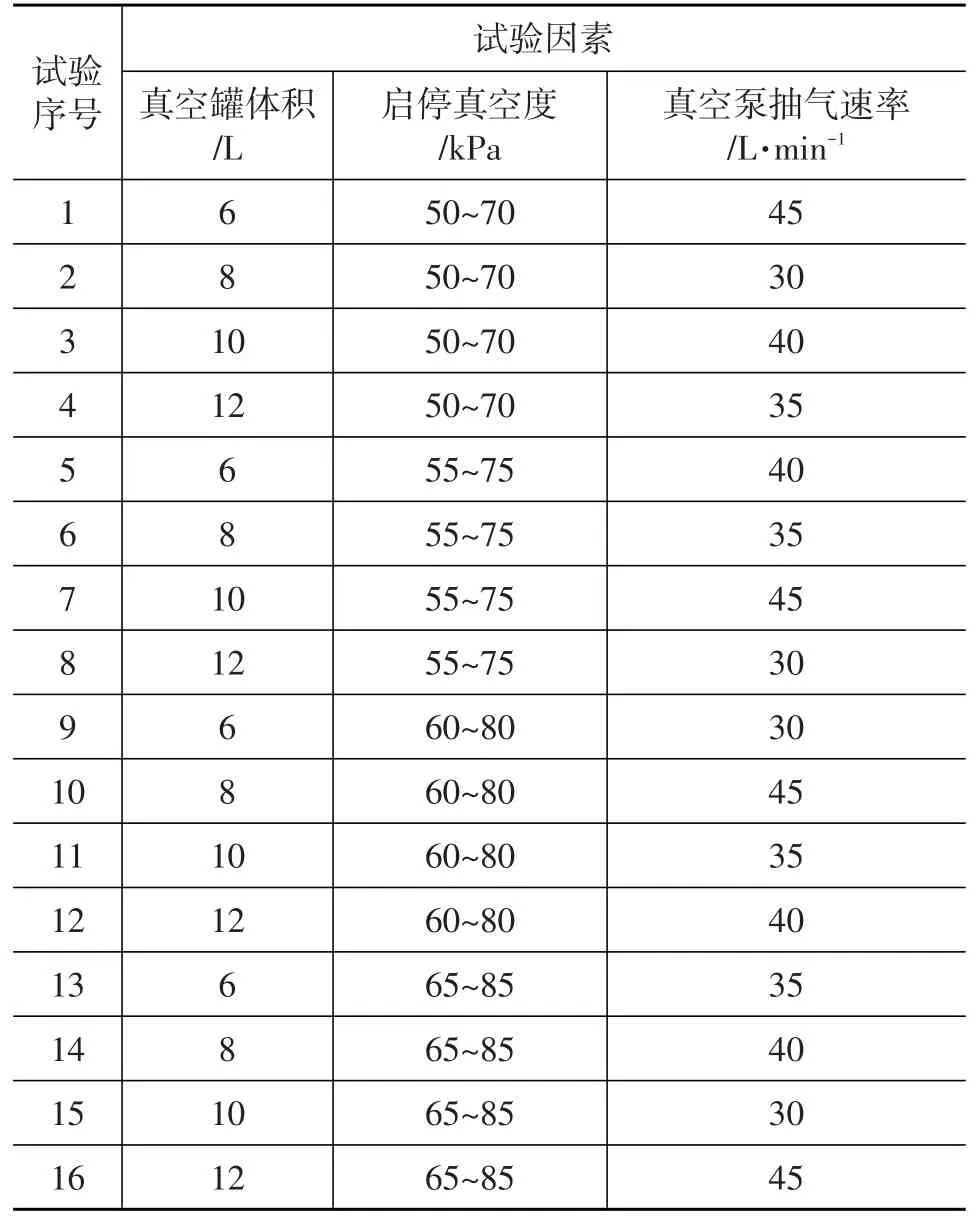
表4 正交试验表
a.真空度范围确定。标准QC T307—1999《真空助力器技术条件》中要求进行反应时间试验和输入输出特性试验时采用真空度为66.7 kPa,但未对真空度范围进行规定;QC T《汽车电动真空泵性能要求及台架试验方法》在工作耐久性试验顺序和试验条件中要求真空度的启停范围为55±5~85±5 kPa。为此,综合以上规范要求,在50~90 kPa之间进行启停真空度的选取,并将66.7 kPa包含在选取范围之内,即选择50~70 kPa、55~75 kPa、60~80 kPa、65~85 kPa等4个启停真空度进行仿真试验。
b.真空罐体积确定。真空罐体积太大将影响启动真空度,太小则导致真空泵频繁起动,为此选择真空罐体积为6~12 L的常用范围,将6 L、8 L、10 L、12 L作为4个水平。
c.真空泵抽气速率选取。真空泵抽气速率选择市面上电动公交车使用较多的真空泵抽气速率,即30~40 L/min,以5 L/min为间隔进行选取。
仿真试验结果如表5所列。

表5 仿真试验结果
根据仿真试验结果计算各试验因素对能耗仿真结果的均值和极差,如表6所列。
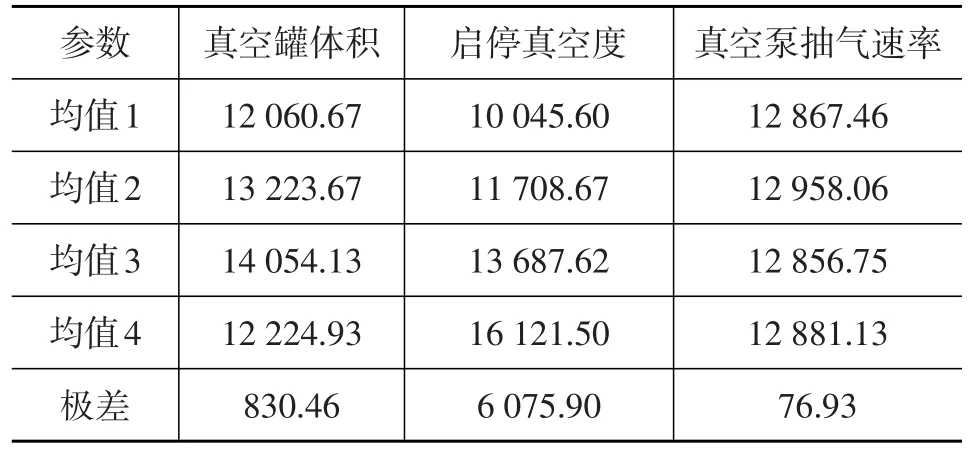
表6 真空泵能耗的均值和极差
由表4~表6可知,各试验因素对试验目标的影响程度为:启停真空度>真空罐体积>真空泵抽气速率。能耗最小的组合是:6 L的真空罐,启停真空度为50~ 70 kPa,真空泵抽气速率为45 L/min,该匹配结果在松山湖4A工况下的能耗为9 396.06 J,与电动公交车原匹配参数(10 L真空罐,启停真空度50~70 kPa,真空泵抽气速率40 L/min)时的能耗(11 048.3 J)相比,约节省14.2 %的能耗。
5 结束语
建立了基于Modelica语言的电动公交车整车模型和真空助力制动系统模型,设计了基于车辆数据采集系统VBOX-3i的测试方案,对电动公交车进行实车路况测试,将测试结果与仿真结果进行对比,验证了仿真模型的准确性,并利用正交试验法对制动系统参数进行了优化。结果表明,仿真模型能很好地反映电动公交车在实际工况下的工作情况,采用优化匹配后的参数可节省约14.2 %的真空制动系统能耗。
参考文献
1张洪昌,陈立平,张云清.基于Modelica的ABS电磁阀多领域建模仿真分析.系统仿真学报, 2009, 21(23):7629~ 7633.
2孙骏,朱忠奎,尹安东,等.汽车制动防抱系统的混合建模与仿真研究.系统仿真学报, 2004, 16(9):2059~2062.
3曲金玉,李训明,任传波,等.液压混合动力公交车制动性能仿真与试验分析.汽车技术, 2014(9):48~52.
4Sanz, Victorino; Urquia, Alfonso; Cellier, François E.; Dor⁃mido, Sebastian. Modeling of hybrid control systems using the DEVSLib Modelica library.Control Engineering Prac⁃tice, v0, n1, p24-34, January 2012.
5达道安.真空设计手册(第3版).北京:国防工业出版社, 2004.
6刘玉波.旋片式真空泵的研究:[学位论文].兰州:兰州理工大学, 2010.
7王今鑫.车用旋片式电子真空泵的设计与试验研究:[学位论文].广州华南理工大学, 2011.
8张海军,郝占武,金叙龙,等.电动汽车真空助力制动系统的匹配计算与研究.汽车技术, 2012(4):36~38.
9阮廷勇,张开斌.武汉市电动汽车行驶工况研究.客车技术与研究, 2007(1):26~30.
10洪伟.吴承祯.试验设计与分析:原理·操作·案例.北京:中国林业出版社, 2004.
11 Fritzson P. Principles of Object - oriented Modeling and Simulation with Modelica 2.1. New York: IEEE Press, 2003.
(责任编辑文楫)
修改稿收到日期为2015年10月11日。
Modelica-based Modeling and Simulation of Electric Vehicle Brake System and Parameter Optimization
Xiong Huiyuan1,2, Zhan Shuang1,2, Yu Limin1,2, Zhou Yushan3
(1. Sun Yat-sen University, Guangzhou 510006; 2. Dongguan Technology Institute of Sun Yat-sen University, Guangzhou 523808; 3.Guangzhou Automobile Group Co., Ltd Automotive Engineering Institute, Guangzhou 511434)
【Abstract】A simulation model of electric vehicle and vacuum assist brake system based on multi-domain unified modeling language-Modelica is established. A testing method based on VBOX-3i data logger is proposed. The simulation results agree with the test results and the accuracy of the model is verified. Based on the model, the parameters of vacuum assist brake system are optimized by orthogonal experiment method. The optimized parameters can reduce energy consumption of the vacuum assist brake system by approx. 14.2%.
Key words:Electric vehicle, Brake system, Modeling and simulation, Parameter optimization
中图分类号:U469.72
文献标识码:A
文章编号:1000-3703(2016)02-0033-05
ƽ基金项目:广东省战略性新兴产业核心技术攻关项目(编号:2011A010802003)、东莞市重大科技专项(编号:2011215155)。
主题词:电动汽车制动系统建模仿真参数优化
