滑模控制策略在三相PWM整流器中的应用①
2021-07-05蒋龙云岳倩倩
蒋龙云,岳倩倩,张 俊,朱 敏
(安徽三联学院电子电气工程学院,安徽 合肥 230601)
0 引 言
随着非线性负载的大量出现,电网的谐波问题也变得逐渐严重化。对于以往的二极管整流器及只能控制导通而不能控制关断的晶闸管整流器,由于其整流环节不完全可控,将造成交流电网侧的功率因数比较低。为了使整流器在工作过程中更加高效清洁,就必须要求整流器装置交流侧电流正弦化,这些只能通过PWM整流器才能实现。目前双闭环PI控制是三相电压型PWM整流器(三相VSR)的主要控制方法,控制算法简单易实现,但由于PI环节的作用总有一定的滞后性,这就使得当系统参数发生变化时,PI控制环节很难快速跟随响应。在双闭环PI控制算法的基础上稍作改进,电压外环摒弃传统的PI控制而采用滑模控制策略,电流内环先进行解耦,再采用PI控制,并通过Simulink加以仿真验证,结果表明,采取滑模控制后系统的响应速度有所增加,抗干扰能力有所增强。
1 三相电压型PWM整流器数学模型的建立
PWM整流电路的拓扑结构如下图1所示,包含三对桥臂,每对桥臂由上下两个管子构成。其中,ea,eb,ec为输入侧三相电源的电动势,L为输入侧电感参数,R是输入侧导线的电阻,ia,ib,ic为三相输入电流。C为直流侧稳压电容,稳定输出电压Vdc。
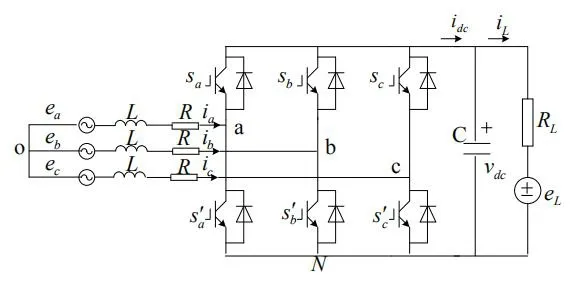
图1 三相半桥电压型PWM整流电路主电路结构图
由图1可知,当ea,eb,ec为三相对称电源时,PWM整流器在abc三相静止坐标系下的数学模型为:

(1)
由式子(1)可知,三相VSR整流器在abc坐标系下的数学模型中包含微分关系,是非线性的并且随时间变化,研究比较复杂。为此,根据等功率原则对表达式(1)进行d-q变换,目前,d-q变换的方式总共有四种,不同的专著中描述的d-q变换各不相同,采用的是q轴有功,d轴滞后无功算法,得到PWM整流器在d-q坐标系下的数学模型,如下式(2)所示:
(2)
其中,Sd,Sq分别为d轴和q轴的开关函数,id为交流侧电流的无功分量,iq为交流侧电流的有功分量。
2 电压外环滑模控制器设计
目前,三相VSR一般多选取双闭环控制方式,即外环加上内环,其中外环控制电压,内环控制电流,控制原理图如下图2所示。
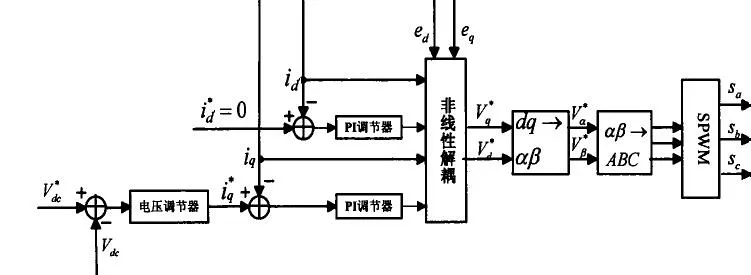
图2 双闭环控制原理图
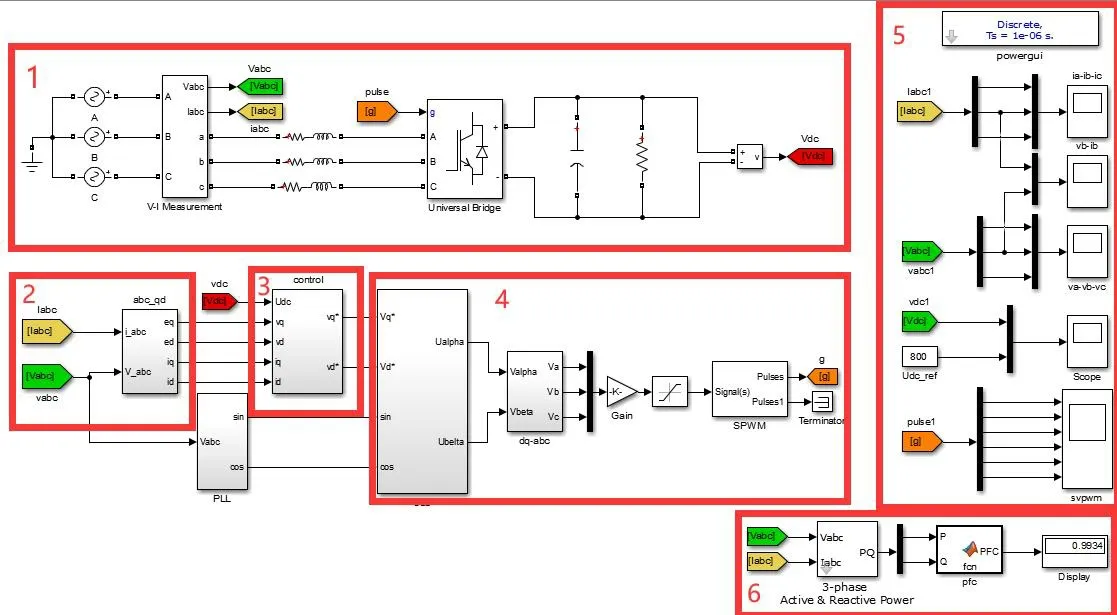
图3 仿真主电路图

但PI控制器都是在检测到输出信号后才会随之进行调整,控制具有一定的滞后性,当系统存在干扰或系统参数发生变化时,系统的响应速度会比较慢,为此在传统双闭环控制的基础上,用滑模控制来代替电压控制中采用的PI控制,而滑模控制从根本上来说是一种非线性控制,且动态响应号,抗扰动能力强,可以很好的提高系统的动态性能。
(3)
将(2)式待入(3)式有:
(4)
(5)
(6)

图4a 传统双闭环PI控制算法

图4b 滑模控制算法

图5a 传统双闭环PI控制算法
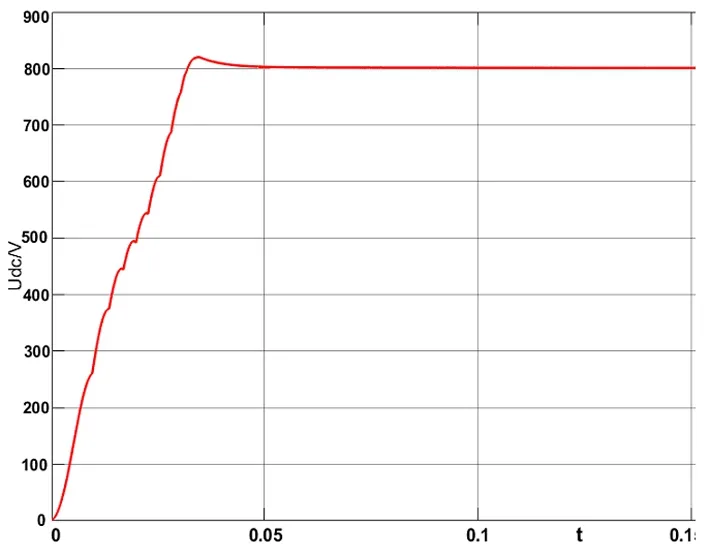
图5b 滑模控制算法
3 电流内环控制器设计



图6a 传统双闭环PI控制算法

图6b 滑模控制算法
4 仿真及结果说明
为了比较传统双闭环控制策略和滑模控制策略的各项性能,利用MATLAB中的SIMULINK模块分别搭建了双闭环控制方式下和滑模控制方式下的两种电路,对正常稳态运行和负载突然发生变化等多种情况进行仿真。其中交流侧电压有效值为220V,频率50Hz,滤波电感L为0.01H,等效电阻阻值为0.01Ω,整流器输出端稳压电容C为0.003F,负载为纯电阻,阻值为100Ω,滑模系数β=0.009,仿真电路图如下图3所示,图中1为主电路,2实现的是从三相静止坐标系转换到两相静止坐标系再转换到两相旋转坐标,3为PWM整流器的主要控制环节,采用了两种控制算法,为传统双闭环PI控制算法和滑模控制算法。
两种不同控制算法交流侧三相电流波形如下图4所示,其中,图4a为传统双闭环PI控制算法的交流侧三相电流波形,图4b为滑模控制算法的交流侧三相电流波形,比较两图可以看出传统双闭环PI控制算法下系统要到0.05s才趋于稳定,但滑模控制算法下系统系统不到0.04s就趋于稳定,可见滑模控制算法的响应速度要比传统双闭环PI控制算法快。
两种不同控制算法直流侧输出电压波形如下图5所示,其中,图5a为传统双闭环PI控制算法的输出电压波形,图5b为滑模控制算法的输出电压波形,比较两图可以看出滑模控制算法的响应速度更快,超调量更小,其中传统双闭环PI控制算法的超调量为3.2%,滑模控制算法的超调量为3.0%,要略低于传统双闭环PI控制算法的超调量。
为了验证两种算法在系统参数发生变化时的动态响应特性,令负载在0.1s从100Ω降为50Ω,得到输出电压Vdc的波形如图6所示,其中,图6a为传统双闭环PI控制算法输出电压的波形图,图6b为滑模控制算法输出电压的波形图,比较两图可以看出,滑模控制算法在负载发生变化时的响应速度要比传统双闭环PI控制算法快,能够很快重新回到稳定状态,且负载降低时直流电压的跌落也比较小,动态性能更好。
5 结 论
以三相电压型PWM整流器为基础,在双闭环PI控制方式的基础上,提出用滑模控制来代替电压外环的PI控制,从而解决了传统PI控制滞后性的缺点,提升了整流器的动态特性。最后通过仿真软件对双闭环PI控制和滑模控制进行仿真,通过对仿真结果加以对比,发现滑模控制比双闭环控制具备更好的动态性能,当负载突变时,动态响应更迅速,精确度更高。
