自主紧急制动系统在新车评价规程中的现状与发展
2016-03-30孙勇郭魁元高明秋
孙勇 郭魁元 高明秋
(中国汽车技术研究中心,天津300300)
自主紧急制动系统在新车评价规程中的现状与发展
孙勇郭魁元高明秋
(中国汽车技术研究中心,天津300300)
【摘要】自主紧急制动系统对避免碰撞或减轻碰撞伤害起到重要作用,已被纳入多国新车评价规程中作为主动安全的测试内容。在分析自主紧急制动系统的原理以及研究现状的基础上,对各国新车评价规程中对其测试评价方法的差异进行了对比,阐述了其在新车评价规程中的发展趋势。结果表明,Euro NCAP测试标准严格,在测试评价方法上更加全面具体,可为制定适合中国道路交通环境的自主紧急制动系统测试评价方法提供参考。
1 前言
自主紧急制动(Autonomous Emergency Braking,AEB)、电子稳定性控制(Electronic Stability Control, ESC)与自适应巡航控制(Adaptive Cruise Control, ACC)均同属于汽车主动安全领域的重要技术,是未来车辆先进驾驶辅助系统(Advanced Driver Assistance System, ADAS)的重要组成部分。AEB系统能够对车辆前方潜在的碰撞危险进行识别,并给予驾驶员相应的警告提示,紧急情况下还能对车辆自主施加制动以避免或减轻碰撞危险,可有效降低碰撞交通事故的发生[1,2]。AEB作为一项重要的主动安全技术,在多国新车评价规程中已将其纳入主动安全的测试内容,且各大公司均推出了自己的紧急制动系统,如威伯科的On Guard Plus、博世公司的PEBS(Predictive Emergency Braking System)、沃尔沃的City Safety、大众的Front Assist、丰田的PCS、本田的CMBS、奔驰的Pre-safe等。由于各国道路交通情况及驾驶员驾驶习惯等存在差异,适用于各国的AEB系统测试评价方法也不尽相同,不同机构提出的测试评价方法也有所区别,故有必要对AEB系统测试评价的现状与发展趋势进行研究。
2 AEB系统的工作原理
有关研究表明,因驾驶员因素引发的车辆追尾事故中,31 %的事故是由于驾驶员瞌睡或注意力不集中而对潜在危险没有作出反映引起,49 %的事故是由于驾驶员对危险的反映迟缓或采取的制动强度不够引起,20 %的事故是由于驾驶员以最大强度制动但不够及时[3]引起,如图1所示。
由图1可看出,驾驶员对前方危险的反映快慢程度是避免车辆碰撞的直接因素,即若能预先判断或对车辆施加制动,碰撞伤害发生的概率将会大大降低。AEB系统即可解决上述问题,该系统的实施分为前方碰撞预警、紧急制动辅助和自主紧急制动3个阶段,如图2所示。
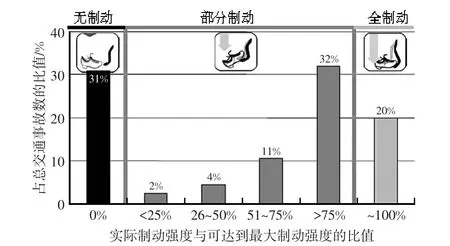
图1 因驾驶员因素引发的车辆追尾事故统计结果
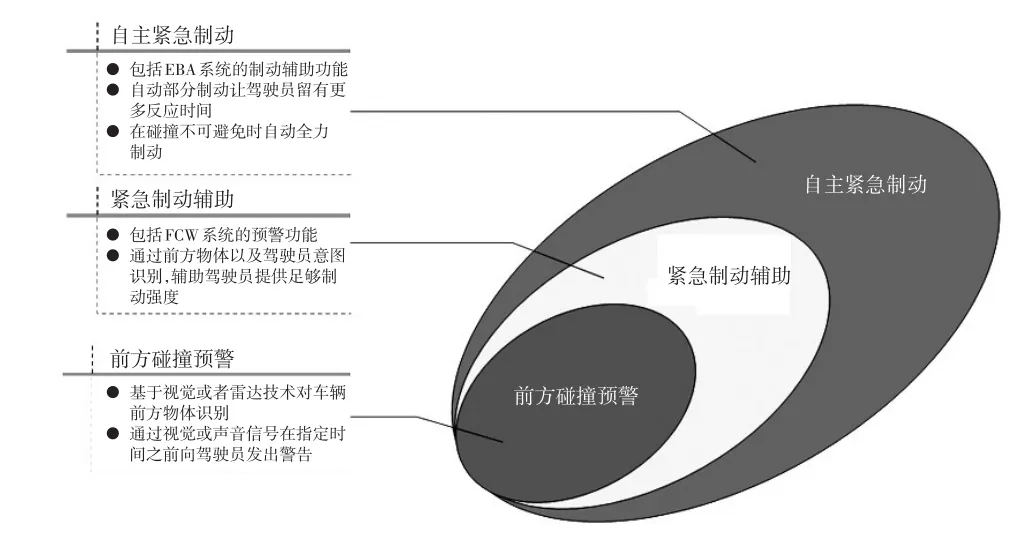
图2 AEB系统工作原理
前方碰撞预警(Forward Collision Warning,FCW)系统可实时探测车辆前方障碍物并识别障碍物与车辆间的相对速度、距离,若两者逐渐接近的速度、距离达到设置的碰撞阈值,FCW系统会给予驾驶员相应的危险警告,使驾驶员具有一定时间作出反映并采取措施控制车辆安全。当驾驶员对碰撞危险做出了反映,但是制动强度不足以消除潜在的碰撞危险时,紧急制动辅助(Emergency Braking Assist, EBA)系统会自动加大制动强度,辅助驾驶员避免碰撞或减轻碰撞伤害。在EBA基础上,AEB系统可以通过自主制动来让驾驶员获取更多的反映时间并引导驾驶员紧急制动,当碰撞危险不可避免时,AEB系统会自主全力制动车辆,保证车辆安全最大化。AEB系统还包括FCW和EBA的所有功能,是最高级工作阶段。
3 国外对AEB的测试评价方法
3.1Euro NCAP评价
Euro NCAP(欧洲新车安全评鉴协会)从2014年开始将AEB纳入新车主动安全的评价规程。AEB的测试规程包含了市区驾驶环境(AEB City)及郊区驾驶环境(AEB Inter-Urban)下的两类试验,并各自有不同的评分方法,分属于成人乘员保护和安全辅助下的内容[4],两类试验用于测试评价的基本测试场景相同。Euro NCAP选定与实际M1类乘用车相同视觉、雷达、发射率属性的充气物体作为目标车辆(Euro NCAP Vehicle Target,EVT),其内部以气体填充物做支撑,外部覆盖绘有车辆特征的PVC材料。试验车辆(Vehicle Under Test,VUT)上AEB系统的功能测试场景如表1所列。
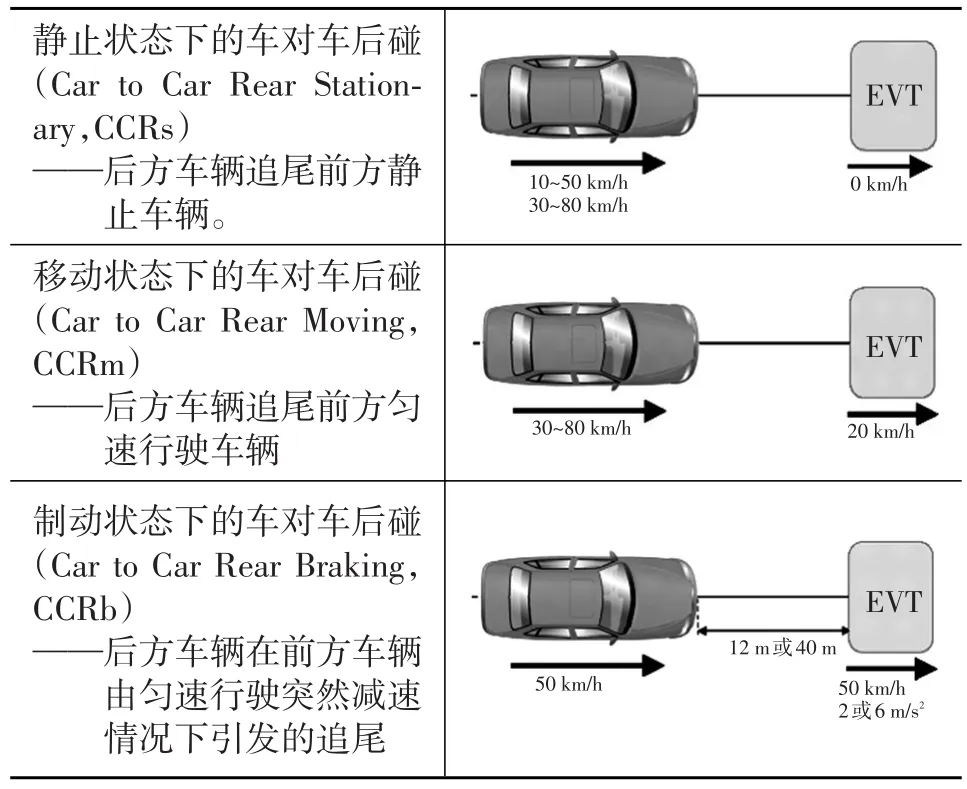
表1 用于AEB测试评价的Euro NCAP基本测试场景
3.1.1市区驾驶环境评价
市区驾驶环境是测试车辆低速行驶时AEB系统在CCRs工况下的工作情况,其获得分值需要满足两个前提条件:一是前排座椅鞭打试验得分至少为1.5或Good;二是在20 km/h及以下速度试验中需保证完全避免碰撞。市区驾驶环境的测试评价包含AEB系统功能测试和人机界面测试(Human Machine Interaction, HMI)两部分。
3.1.1.1AEB功能测试
AEB功能测试以接近碰撞的相对速度的降低量(碰撞前、后速度差)与每个测试速度的比值高低进行评分。CCRs工况中每种测试速度下对应的得分如表2所列。
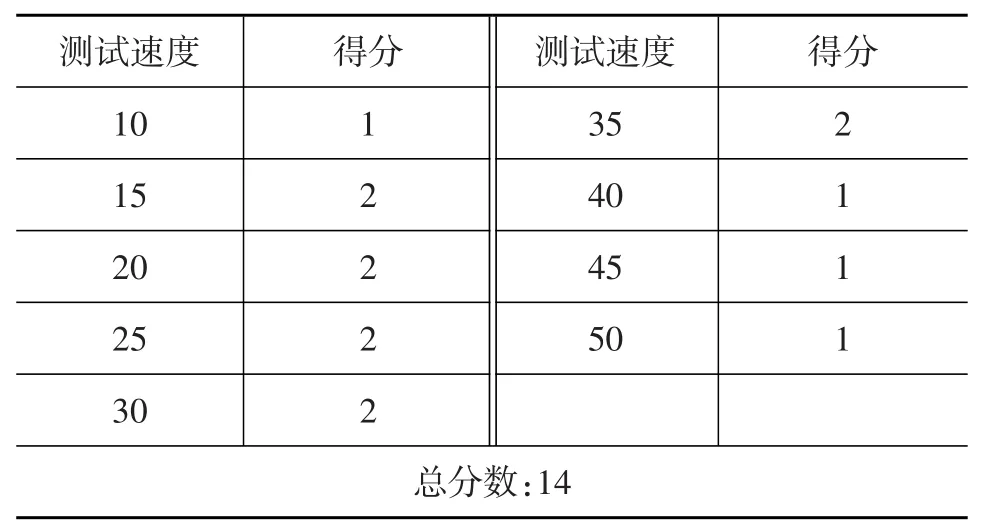
表2 AEB系统功能测试评价速度得分(Euro NCAP)
对于无法完全避免碰撞发生的试验,通过采用碰撞时相对速度和测试速度线性插值的方法来计算对应单个试验的得分,计算公式为:
单个试验得分=([测试速度-相对速度)/
测试速度]·测试速度得分(1)
3.1.1.2人机界面测试
为获得HMI得分,AEB需要在车辆每次起动时处于默认开启状态,如表3所列。

表3 HMI评价得分(市区驾驶环境)
市区驾驶环境总体分数需要根据AEB功能测试得分及HMI得分并分别归一化为百分比分数后,再依照以下公式及权重计算总得分:
市区驾驶环境得分=(AEB得分×2.5)+(HMI得分×0.5)(2)
3.1.2效区驾驶环境评价
效区驾驶环境是测试车辆在所有驾驶环境下AEB系统的工作情况,涵盖了CCRs、CCRm和CCRb等测试工况,可同时评价AEB系统及FCW系统所起的作用,其中CCRs工况只进行FCW测试。获得效区驾驶环境评分的前提条件是AEB系统或FCW系统可以在80 km/h的车速下正常工作。效区驾驶环境的评价分为人机界面测试、FCW系统功能测试和AEB系统功能测试三部分。
3.1.2.1人机界面测试
获得HMI得分需满足的条件是,AEB系统和/或FCW系统需在每次车辆起动时默认开启,FCW系统(如果具备)的报警需清晰响亮。满足以上条件后,依据表4所述进行人机界面评价。
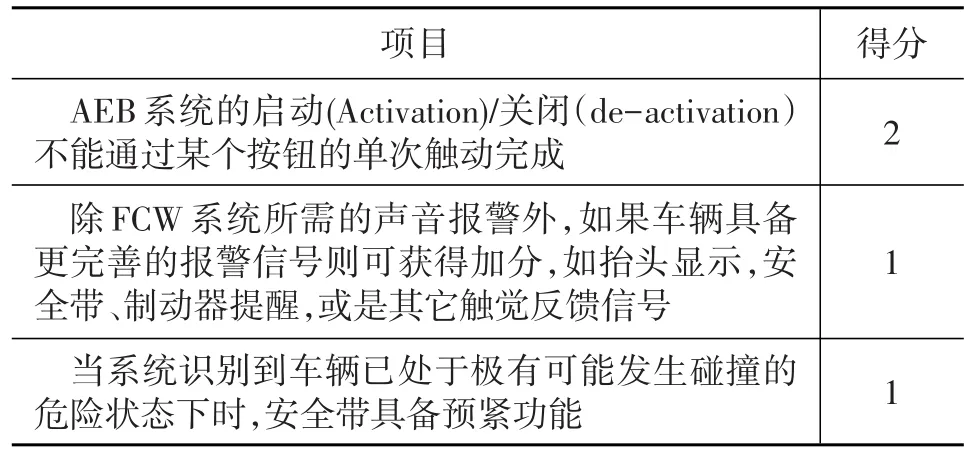
表4 HMI评价得分(AEB Inter-Urban)
3.1.2.2FCW、AEB功能测试
FCW、AEB的功能测试以接近碰撞的相对速度的降低量与每个测试速度的比值高低进行评分。对于CCRb工况,试验的相对速度视为初始试验速度。
表5为在CCRs、CCRm、CCRb等3种测试场景下,不同试验车速时FCW、AEB功能测试得分。对于无法完全避免碰撞发生的试验,同AEB City中功能测试一样采用线性插值的方法来计算对应的单个试验得分。
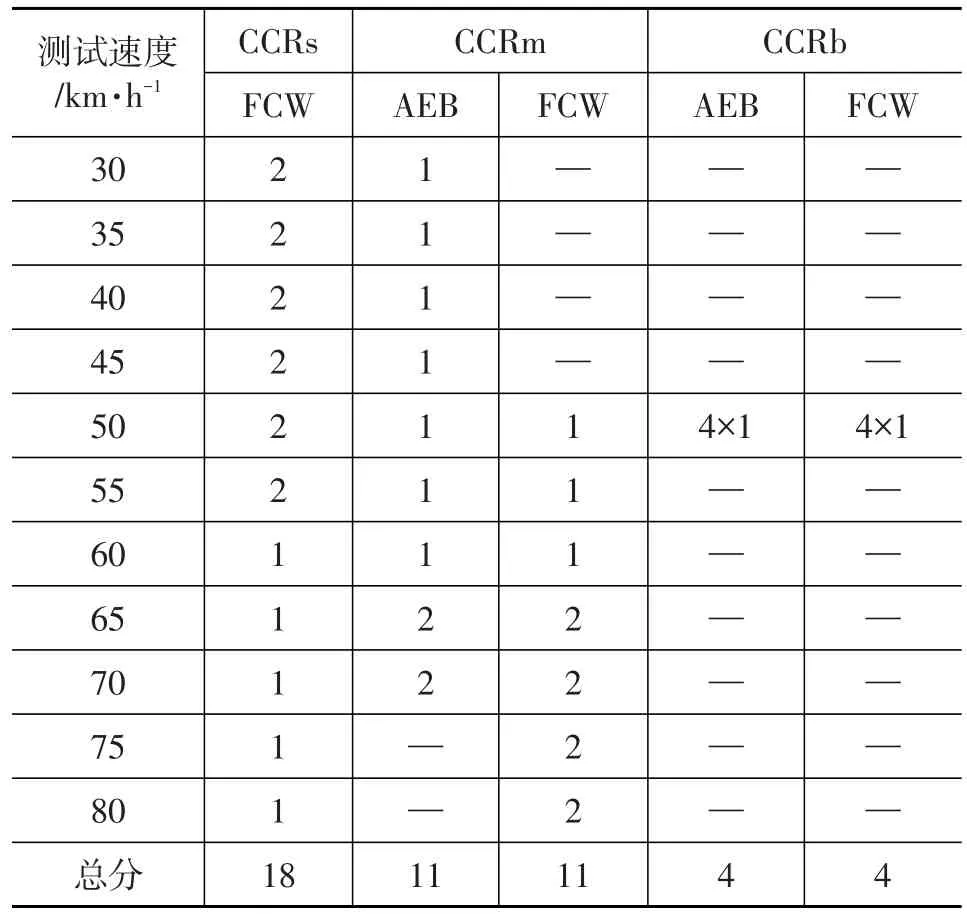
表5 FCW、AEB功能测试评价得分(Euro NCAP)
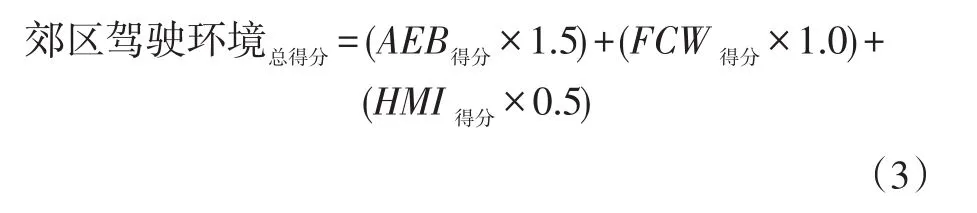
根据AEB、FCW和HMI各项得分分别归一化为百分比分数,依照以下公式及权重计算总得分:
3.2IIHS评价
美国公路安全保险协会(Insurance Institute for Highway Safety,IIHS)自2013年10月起将前方防碰撞(Front Crash Prevention)系统评价纳入新车评价规程中。前方防碰撞系统评价分为优秀、高级和初级3个等级。从2014年开始,新车如果获得IIHS评价规程中最高等级的高级+评级,需要在前方防碰撞系统评价中至少获得初级的评级。
前方防碰撞系统评价得分高低由车辆是否可以自动制动及制动后车辆速度的降低量来决定。如果可以自主制动,测试车辆在给定的不同速度(低速19.3 km/h和中速40.2 km/h)测试工况下评定,评分准则根据防碰撞系统能将车辆速度降低多少来给予相应分值,车辆速度降低的越快,发生碰撞的危险性越小,得分就越高[5]。FCW系统功能评价依据NHTSA标准判定,即在3种测试场景的5~7次测试试验中,在指定时间之前发出预警,即只要具有碰撞提醒功能便可获得一个分值。前方防碰撞系统评价分值最高为6分,分值评价准则如表6所列。
3.3NHTSA评价
美国高速公路安全管理局(National Highway Traf⁃fic Safety Administration,NHTSA)在紧急制动(Crash Im⁃minent Braking, CIB)方面做了大量的研究,针对行人、车的交通状况确定了多种测试场景,但还未全部纳入新车评价规程中[6]。目前评价规程仅针对最大总质量为4 540 kg以下乘用车制定了FCW的测试规范,该评价分为3个测试场景[7],如表7所列。其中,SV(Subject Ve⁃hicle)代表本车,POV(Principal Other Vehicle)代表前方碰撞车辆。对每个测试场景需要重复进行7次试验,FCW功能至少在5次试验中起作用方可认定该测试场景有效。如果前5次试验均有效,则不需要进行额外的2次试验。
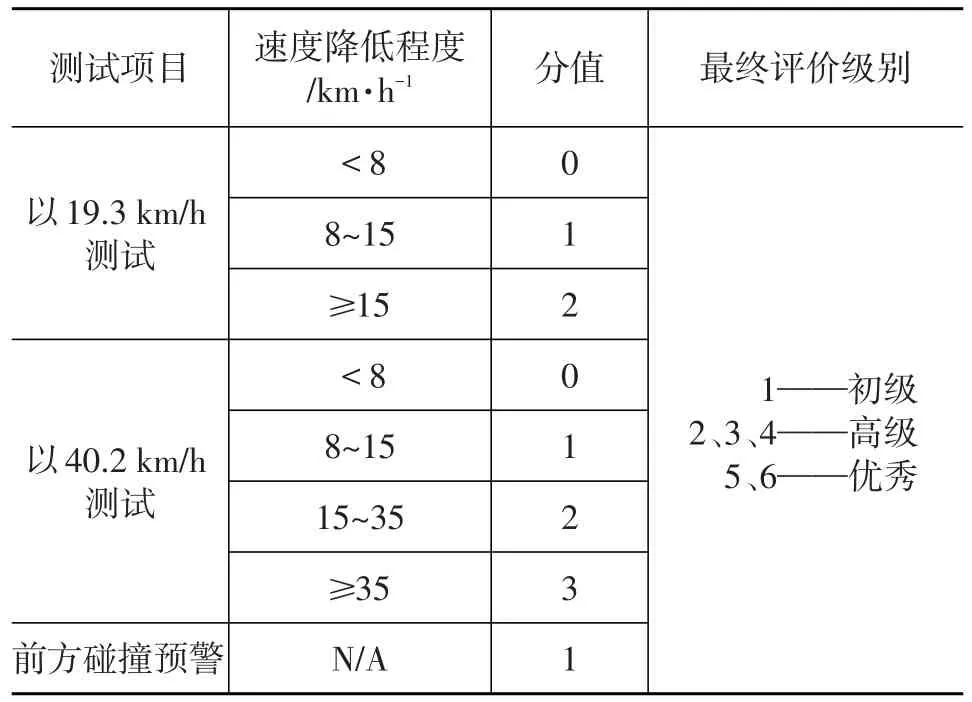
表6 前方防碰撞系统功能测试评价准则
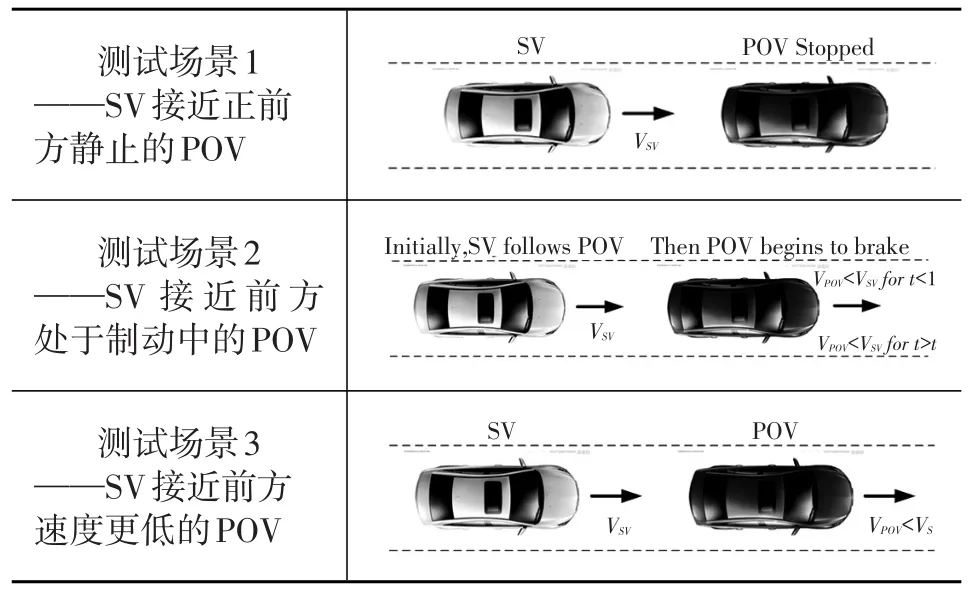
表7 用于FCW测试评价的NHTSA基本测试场景
3.3.1测试场景1
测试场景1主要测试FCW系统对前方静止车辆的识别检测功能。该测试场景要求至少在碰撞时间前2.1 s发出预警,测试从SV距POV前方150 m的距离开始,当FCW系统发出预警或碰撞时间降低到FCW系统预警最小容许范围的90 %(1.9 s)以下时测试结束。
3.3.2测试场景2
测试场景2主要测试FCW系统对前方制动车辆的识别功能,并向SV驾驶员提供预警。该测试场景要求至少在碰撞时间前2.4 s发出预警。测试时SV与POV 以72 km/h速度相距30 m行驶,某一时刻POV开始制动,POV在1.0~1.5 s内达到0.3g的制动减速度。当FCW系统发出预警或碰撞时间降低到FCW系统预警最小容许范围的90 %(2.2 s)以下时测试结束。
3.3.3测试场景3
测试场景3主要测试FCW系统对前方速度更低车辆的识别功能,并向SV驾驶员提供预警。该测试场景要求至少在碰撞时间前2.0 s发出预警。测试时POV 以32 km/h的速度行驶,SV以72 km/h的速度接近POV,测试从两者相距100 m开始,当FCW系统发出预警或者碰撞时间降低到FCW系统预警最小容许范围的90 %(1.8 s)以下时测试结束。
3.4J-NCAP评价
日本于2014年10月将AEB系统纳入J-NCAP的主动安全评价中,J-NCAP采用FCW系统与AEB系统功能测试相结合的评价项目,其试验方法与Euro-NCAP保持协调,采用CCRs和CCRm两个测试场景进行评价,没有产生新的试验方法,在此基础上根据日本实际道路情况确定每个试验的分值分配[8],如表8所列。
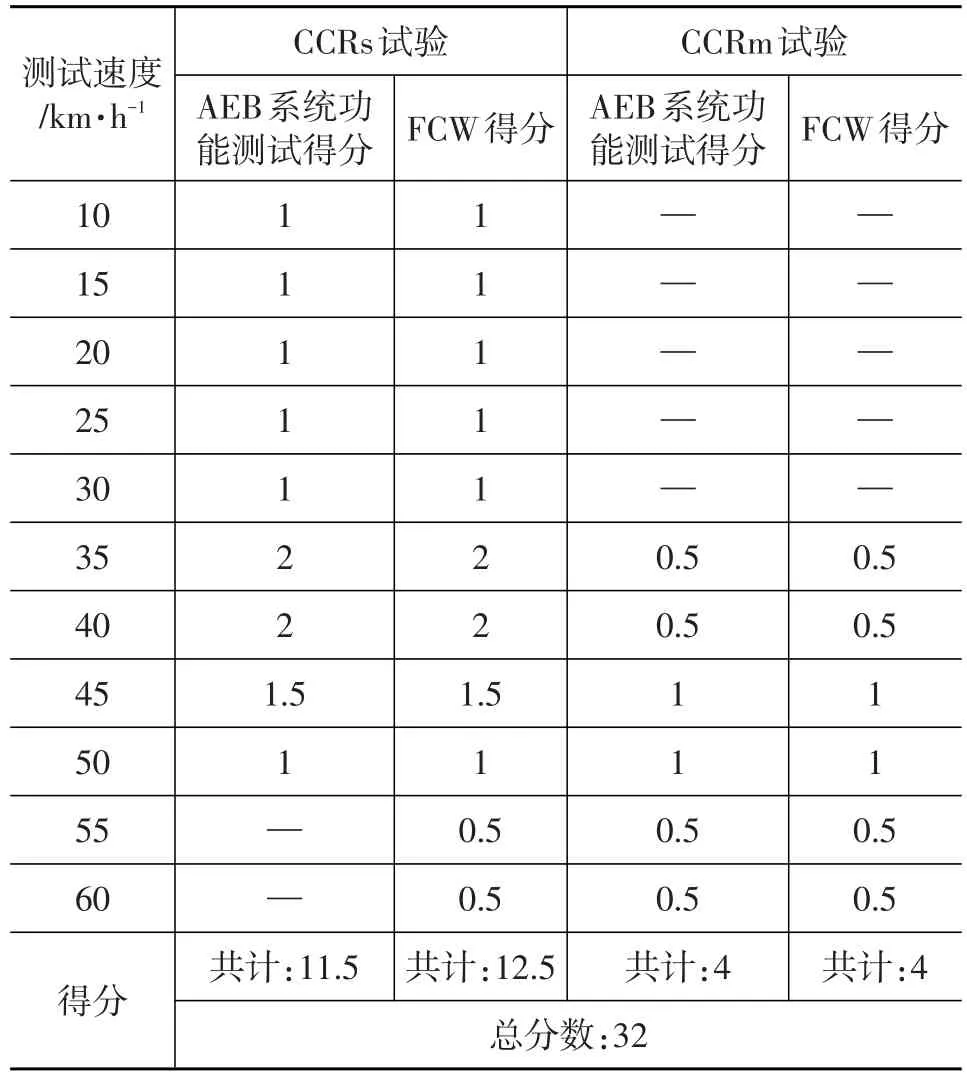
表8 FCW和AEB功能测试评价得分(J-NCAP)
与Euro NCAP的速度分值计算方法一致,以接近碰撞的相对速度的降低量与每个测试速度的比值高低进行评分;对于无法完全避免碰撞发生的试验,使用线性插值的方法来计算对应的单个试验得分。
4 AEB系统在中国的发展现状
中国交通事故发生率远超发达国家,事故死亡率相对较高,对AEB系统具有潜在的需求。目前我国各汽车厂家已经逐渐意识到AEB系统的安全潜力,但对AEB系统的研究多集中于理论及仿真方面,应用于实际道路测试的研究较少,还未推出相应的产品。
文献[9]通过行驶记录仪采集了中国实际道路交通驾驶危险工况的实车数据,以此为基础进行主观评价筛选并分类得到与ABE直接相关的道路碰撞危险工况,利用驾驶员反应时间确定了危险开始时刻,进而获得相应的测试场景基础参数,并依此提出了适合中国城市道路交通情况的4种测试场景(目标车静止、目标车匀速、目标车轻微制动和目标车紧急制动)。文献[10]以上海道路实际发生碰撞危险工况为依据,采用聚类分析方法对碰撞危险的道路数据加以分析处理,建立了5类具有典型危险工况的测试场景,通过仿真测试模型评价了测试场景的有效性。文献[11]针对中国道路环境下骑车人(包括自行车、摩托车以及电动助力车)引发交通事故占交通事故总数的比例较大的情况,建立了7类危险场景进行虚拟测试,得到了涉及骑车人的典型危险工况场景库。文献[12]提出了一种新的自主紧急制动系统避撞策略,并进行了计算机仿真验证,但提出的AEB系统控制算法还有待实车验证。
我国部分企业已着手进行车辆智能驾驶控制系统与应用技术平台的自主开发,为ADAS技术的深入研究打下基础[13]。自主品牌红旗H7作为首次配备包含主动安全AEB系统在内的车辆,标志着主动安全产品在中国自主品牌汽车上快速发展的开端。随着全球主动制动系统可靠性提升、生产成本和整车匹配费用的下降,以及相关法规的推动,国内AEB系统市场需求量在未来几年将得到长足发展。
目前AEB系统若在中国有所发展需要突破以下几个技术层面。
4.1对道路环境及驾驶员行为的分析研究
深入理解和把握实际道路交通环境的碰撞事故和驾驶员的驾驶行为,将有助于对AEB系统的介入工作进行更为合理和更加有效的状态设计,这需要大量的数据及长时间的经验积累。中国道路环境及驾驶员的驾驶习惯与国外相差较大,因此国内研发AEB系统必须要考虑中国道路交通环境的特点以及驾驶员的行为模式。国外的NHTSA、Euro FOT等机构在这一领域的研究已走在前沿,对ADAS相关的技术系统的功能、驾驶者的行为及与这些系统相互作用进行了数据采集与分析,这对我国开发AEB系统有一定的借鉴意义。
4.2AEB系统研发的基础理论技术
在获得道路环境及驾驶员行为分析的数据研究结果后,ABE系统产品的研究与开发需要相关的基础理论技术,一般包括环境信息融合技术和ESC系统相关技术两方面。
a.环境信息融合技术。AEB系统需要对前方障碍物进行识别并发出报警,故需要车辆对周围环境进行感知并融合环境信息为车辆行为决策提供依据,目前AEB系统对周围环境感知主要基于机器视觉和雷达探测等技术。机器视觉对物体的纹理、颜色有良好的感知能力,可以获得相对丰富的道路环境、车辆运行轨迹等信息,但对特殊复杂环境的适应性较差;雷达可对车辆周围环境的位置信息进行有效判断,但抗干扰性相对较差。基于中国特定的复杂交通环境,如何将周围环境的多变量信息进行整合、决策并让车辆及时执行相关操作,以及考虑中国路况和驾驶员驾驶习惯的适应性匹配工作都是AEB系统在实际道路交通环境应用中所面临的重要问题。
b. ESC系统相关技术。当驾驶员反应时间不足或驾驶员的操作无法保证车辆避免碰撞事故的发生,AEB系统会及时主动参与工作,在制动主缸主动建立油压对车辆施加制动,这与ESC系统主动建压进行横摆稳定性控制原理相同。从这一角度来说,未来主动安全技术的发展都是基于ESC主动建压的技术基础之上的。目前受限于ESC系统相关控制策略、阀体加工工艺等技术,我国还未推出成熟稳定的ESC系统产品,因此攻克ESC相关技术对于AEB系统的市场化以及产业化发展具有促进作用。
4.3AEB系统与未来ADAS技术的综合协调
随着汽车科技的持续发展,面向未来ADAS的产品技术正不断推出,如自适应巡航控制、车道偏离报警、辅助车道变换、交通标志识别、盲点检测、疲劳驾驶侦测等,并将逐步过渡到未来无人自动驾驶技术,这都需要在车辆上增加大量的传感器、控制器等,因而实现系统之间的快速通信和数据共享、各控制系统之间的综合协调控制将是在产品开发阶段综合考虑的因素。
5 AEB在NCAP中的发展趋势
a. AEB纳入NCAP评价的范围更加广泛。随着主动安全技术发挥的作用越来越重要,AEB系统得到各大汽车厂商以及安全研究机构的重视,各国逐渐加大对AEB系统测试方法与评价技术的研究。自2014年起,Euro NCAP要求新车型若要获得五星安全认定,车辆需装配相关驾驶员辅助系统,其中被列入备选项的主动安全系统包括自主紧急制动、智能速度辅助、车道偏离警告或车道保持支持等。主动安全技术在NCAP中的权重会逐步提高,未来AEB系统纳入各国NCAP评价的范围也会更加广泛。
b. AEB系统评价更注重道路环境与驾驶行为影响。AEB系统在实际道路防碰撞上发挥的作用越来越明显,鉴于世界各国道路环境相差比较大,其作用灵敏度、参数匹配等与实际道路交通环境的联系将更加紧密。中国的交通道路状况太复杂,加之一些不良的驾驶行为导致的交通事故,比如频繁随意变道、突然并道切入、急加速急减速、车和行人争道等现象,而一旦出现上述情况,AEB系统如何有效应对如此复杂的交通行驶状况是未来对AEB系统评价的重点内容,未来NCAP会密切结合各自国家的道路交通特点对AEB系统进行测试评价[14]。
c. AEB系统评价项目将更加严格、全面。从世界汽车产业范围来看,NCAP的推出极大地促进了汽车安全技术水平的升级提高,在未来NCAP的评价中,主动安全技术将成为重要内容,同时为进一步提高以及保持NCAP对汽车安全等级评价的区分度,NCAP也将不断提高自己的评价标准[15]。目前各国NCAP所选取的评价项目以及测试场景都尽可能地体现真实典型的道路交通环境,但AEB系统在行人保护、夜晚道路环境等更高要求环境下的工作状态将是未来研究的重点,其评价也将更加全面、更加严格。
6 结束语
本文对Euro NCAP、IIHS、NHTSA和J-NCAP机构在AEB及FCW的评价方法方面进行了比较研究,Euro NCAP对AEB系统的评价考虑了低速城市工况以及中高速郊区工况,评价方法相对全面,测试规程也较具体详细;IIHS侧重于碰撞速度的降低来评价;NHTSA只对FCW进行3个测试场景的评价,对于AEB系统中自动制动的部分未有考虑;JNCAP评价方法与Euro NCAP方法相协调,但在具体试验分值分配上考虑了日本实际道路状况。
鉴于多国已经对AEB系统评价推出不同的测试规程,而适用于中国道路交通环境的AEB系统测试评价规程还未建立。中国应借鉴国外测试评价的方法与思路,研究中国实际道路交通环境,进而得出适于中国国情的AEB系统测试评价方法。1Robert Anderson, Samuel Doecke, James Mackenzie, et al. Potential benefits of autonomous emergency braking based on in-depth crash reconstruction and simulation, Centre for Automotive Safety Research, University of Adelaide, Austra⁃lia, Paper Number 13-0152.
参考文献
2Wesley Hulshof, Iain Knight, Alix Edwards, et al. Autono⁃mous emergency braking test results, Thatcham Research UK, Paper Number 13-0168.
3 Andreas Georgi , Marc Zimmermann et al. New approach of accident benefit analysis for rear end collision avoidance and mitigation systems, Robert Bosch Corporation,CR/AEV, Paper Number 09-0281.
4 European New Car Assessment Programme Test Protocol—AEB Systems Version 1.0,March 2013.
5 http://www.iihs.org/iihs/ratings/ratings-info/front-crash-pre⁃vention-tests.
6National Highway Traffic Safety Administration, Objective Tests for Automatic Crash Imminent Braking(CIB)Systems Final Report, September 2011.
7 National Highway Traffic Safety Administration, Forward Collision Warning System Confirmation Test, February 2013.
8http://www.nasva.go.jp/mamoru/active safety search/about_ active_safety.html.
9江丽君,贺锦鹏,刘卫国,等.自动紧急制动系统测试场景研究.汽车技术,2014(1):39~43.
10刘颖,贺锦鹏,刘卫国,等.自动紧急制动系统行人测试场景的研究.汽车技术,2014(3):35~39.
11李霖,朱西产,刘颖,等.涉及骑车人的典型交通危险场景.同济大学学报(自然科学版),2014,42(7):1082~ 1087.
12李霖,朱西产,董小飞,等.自主紧急制动系统避撞策略的研究.汽车工程,2015,37(2):168~174.
13白傑,边宁,刘永宏,等.车辆智能驾驶控制系统与技术平台的自主开发.汽车安全与节能学报,2013,4(2):121~129.
14马钧,曹静.基于中国市场特定需求的汽车先进驾驶辅助系统发展趋势研究.农业装备与车辆工程,2012(3):5~10,45.
15刘玉光,刘志新.各国新车评价规程(NCAP)测试评价技术的现状与发展.汽车安全与节能学报,2013,4(1):16~ 22.
(责任编辑文楫)
修改稿收到日期为2015年7月1日。
Status and Development of Autonomous Emergency Braking System for NCAP
Sun Yong, Guo Kuiyuan, Gao Mingqiu (China Automotive Technology and Research Center, Tianjin 300300)
【Abstract】Autonomous Emergency Braking (AEB) system plays an important role in avoiding collision or mitigating collision damage, and it has been included in active safety test of New Car Assessment Program (NCAP) in many countries. This paper discusses the principle, studies status of AEB, and compares the differences in testing and evaluation methods for NCAP, describes development tendency. The results show that Euro NCAP is rigorous and comprehensive, and they provide references for testing and evaluation method of AEB which is suitable for China road traffic environment.
Key words:AEB, NCAP, Testing, Evaluation
中图分类号:U467.1+4
文献标识码:A
文章编号:1000-3703(2016)02-0001-06
主题词:自主紧急制动新车评价规程测试评价