潜艇腐蚀相关静态电磁场分布规律的实验验证*
2016-03-04冯亚敏冯汉臣
冯亚敏 陈 聪 冯汉臣
(海军工程大学理学院 武汉 430033)
潜艇腐蚀相关静态电磁场分布规律的实验验证*
冯亚敏陈聪冯汉臣
(海军工程大学理学院武汉430033)
摘要:为对浅海环境中潜艇腐蚀相关静态电、磁场分布规律进行实验验证,根据场产生机理,提出对电场、磁场分布进行同步验证的实验方法,即同步测量水下2个深度平面上场源产生的标量电位及一条测线上的三分量磁感应强度,利用其中一个平面上的标量电位分布反演出场源参数,再据此预测另一平面上的标量电位及测线上的磁场分布,通过比较预测值与实测值,表明理论分析方法及结论的正确性.并在实验室中模拟三层平行分层浅海环境,借助潜艇缩比模型完成了上述实验验证过程,表明浅海中潜艇腐蚀相关静态电磁场分布规律的正确性.
关键词:兵器科学与技术;腐蚀相关静态电磁场;三层平行分层导电媒质模型;缩比模型;实验验证
冯亚敏(1991- ) :男,硕士生,主要研究领域为舰船水下电磁目标特性
*国家自然科学基金项目(批准号:51109215)、国防预研基金项目(批准号:51444070105JB11)资助
0引言
来源于腐蚀或防腐电流的水下静态电磁信号(corrosion related static electric field and magnetic field,CRE and CRM)是潜艇水下新的目标信号[1-3],其分布特征十分明显,可用于潜艇的探测、定位、打击等实际应用.近些年来,围绕其产生机理、建模方式及分布特征,国内外众多研究者纷纷投入大量精力来开展研究[4-8].其中针对腐蚀相关静态电场(CRE),相关的理论及实验研究开展比较全面,也得到了初步的应用.但同步产生的CRM却由于分层导电媒质的存在,相关理论发展较慢,实验室研究工作也开展较少[9-10].文献[11-12]对潜艇水下电磁分布特性进行了理论推导及仿真分析,但由于测试条件要求高,相应的理论分析方法及研究结果尚未得到实验验证.
由于CRE和CRM是同一个源在同一环境中产生的2种类型的场,二者满足Maxwell方程,且满足一定的约束关系,因此在对相应的理论分析方法及研究结果进行实验验证时,应对二者进行同步验证.据此本文提出在实验室中对潜艇CRE和CRM进行实验验证的方法,即模拟3层平行分层浅海环境,利用潜艇缩比模型,同步测量水下2个深度平面上的标量电位分布及一条测线上的三分量磁感应强度分布.通过某一平面上标量电位分布反演出场源参数,再以此为基础推算另一平面上的标量电位及测线上的磁场分布.通过比较预测值与实测值,来表明理论分析方法及所得结论的正确性.同时,本文在实验室中采用此方法完成了对浅海中潜艇腐蚀相关静态电磁场分布规律的实验验证,从而为进一步的应用研究奠定基础.
1实验验证方法
潜艇的腐蚀或防腐电流,在潜艇周围产生CRE,同时也激发CRM,CRE和CRM同步产生,两者相互约束.根据其产生机理,潜艇水下CRE和CRM的主体可以用水平电流线来进行模拟等效,而水平电流线可以视为水平直流电偶极子首尾相接而成.

图1 三层媒质模型
在图1所示的三层媒质模型中,z=0和z=D将空间分为3层,z=0为海水分界面,z=D为海底平面.媒质电容率、电导率分别为εi和σi,下标i=1,2,3,分别代表空气、海水、海床区域.设单个水平直流电偶极子源Idli位于海水中(x0,y0,z0)处,它所产生的矢量磁位和标量电位满足Maxwell方程,约束条件取为:·A+σΦ=0.设,则单个水平直流电偶极子在海水区域内的场点(x,y,z)处产生的标量电位Φ、矢量磁位A为
(1)
(2)
式中:ρ=[(x-x0)2+(y-y0)2]1/2;
R0=[ρ2+(z-z0)2]1/2;
r1k=[ρ2+(z-2kD+z0)2]1/2;
r2k=[ρ2+(z-2kD-z0)2]1/2;
r1m=[ρ2+(z+2mD-z0)2]1/2;
r2m=[ρ2+(z+2mD+z0)2]1/2.
因此一根起于x-、汇于x+的水平直流电流线在海水区域内场点(x,y,z)处产生的标量电位Φ′、矢量磁位A′为
(3)
(4)
一般应用领域,可假设海水磁导率为真空磁导率μ0,则场点处的电场强度和磁感应强度分别为:
(5)
在上述潜艇腐蚀相关静态电磁场的水平电流线模型中,等效场源参数如电流线起点x-、终点x+及电流I等都不能直接测出,只能依靠实测的场分布数据反演得到.由此,本文提出对浅海中潜艇腐蚀相关静态电磁场分布规律进行实验验证的方法是:在实验室中,同步测量潜艇缩比模型水下2个深度平面上的标量电位分布及一条测线上的三分量磁感应强度分布,用其中一个平面上的标量电位分布反演出场源参数,再藉此预测另一平面上的标量电位分布及测线上的三分量磁感应强度分布.通过比较预测值与实测值,来验证相关规律的正确性.
具体步骤如下.
1) 模拟浅海环境和场源浅海环境由空气、海水、海床构成,考虑最简单的平行分层,可采用如图1所示的3层平行分层媒质模型来进行模拟.采用潜艇缩比模型进行实验,并加装外加电流阴极保护系统.
2) 场分布的测量同步对水下两个深度平面上的标量电位分布及一条测线上的三分量磁感应强度分布进行测量.
3) 场源参数反演利用某一平面上的标量电位分布反演潜艇缩比模型的等效场源参数.
4) 预测场,并与实测值的比较以等效场源参数为基础,计算另一平面上的标量电位分布及测线上的磁场分布,并将结果与实测值对比,以验证浅海中潜艇腐蚀相关静态电磁场分布规律的正确性.
2模拟浅海中CRE和CRM的实测
实验室中模拟海洋环境,测量传感器布放示意图见图2.潜艇缩比模型采用外加电流阴极保护系统,其正负电中心连线与水平面平行,且取负电中心指向正电中心的方向为x轴正向,水面取为z=0平面.模拟海水电导率0.598 6S/m,水深0.78m.2排电场传感器(Ag-AgCl电极)距离海底0.40m和0.55m,每排5个,两两间距0.08m.磁传感器(9200CH磁强计)距离海底0.50m,与场源的横向距离0.45m.

图2 实验环境布置示意图
沿+x方向移动艇模,同步记录2排电场传感器及磁传感器输出,即可得到2个不同深度平面上相对某固定点的标量电位分布及一直线上的磁感应强度三分量分布.经滤波及去除背景后,结果见图3~5.

图3 z=0.23 m平面上的标量电位
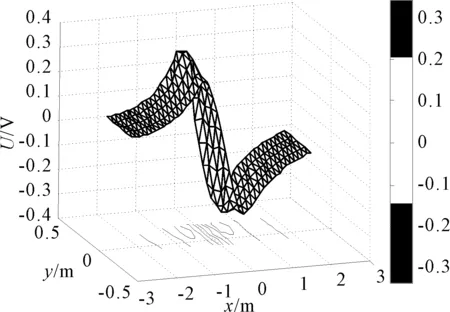
图4 z=0.38 m平面上的标量电位

图5 y=0.45 m直线上的磁感应强度
3等效场源参数的反演
采用相对均方误差来表示计算值与实测值的差异.相对均方误差定义为
(6)
式中:ai测为第i个点的实测值;ai算为第i个点的计算值;N为测量点的总数.
考虑3层海洋环境中潜艇腐蚀相关静态电磁场的水平电流线模型,在相对均方误差最小的目标下,搜索电流起点x-、电流终点x+、电流I的最佳值,这些最佳值即为等效场源参数.
选取z=0.23m平面上235个测点的标量电位数据进行场源参数拟合.拟合出的场源参数分别为:电流起点x-=-0.401m、电流终点x+=0.401m、电流I=0.482A,拟合场源在z=0.23m平面上所产生的标量电位与实测值相比,相对均方误差为14.6%.
4CRE和CRM分布的预测与比较
利用拟合出的场源参数,并结合潜艇腐蚀相关静态电磁场的水平电流线模型,对z=0.38m平面上的标量电位及磁传感器所在的平行于x的直线上的磁感应强度进行预测,并和实测结果进行对比,见图6~7.仍以相对均方误差来表示,每条测线上选取47个测点进行比较,5条测线上的标量电位的相对均方误差依次为:15.6%,27.3%,30.2%,24.1%,13.8%,y=-0.45m直线上的磁感应强度三个分量的相对均方误差依次为:11.6%,12.3%,15.2%.
误差主要来源于: (1) 由于实验在水池中开展,空间坐标测量存在一定的误差;(2) 电场和磁场传感器的测试误差;(3) 空间中存在的电磁杂波构成背景噪声;(4) 场源参数反演存在一定的误差,进而影响磁场预测值的准确性.
由图6~7可见,利用平面电场数据进行场源参数的拟合,并以拟合出的等效场源参数为基础对同一个场源同步产生的标量电位和磁感应强度进行预测,预测值和实测值的吻合程度较好,且与文献[11-12]所得场分布特点是一致的,由此表明浅海中潜艇腐蚀相关静态电磁场分布特征的理论分析方法及所得分布规律是正确的.

图6 z=0.38 m平面上的拟合标量电位与实测值的比较

图7 预测磁场和实测磁场的比较
5结论
1) 针对浅海中潜艇腐蚀相关静态电场、磁场的分布特征的实验验证,所提出来的实验验证方法是有效的;
2) 针对浅海中潜艇腐蚀相关静态电场、磁场的分布特征,文献[11]、[12]所采用的理论分析方法及所得到的分布规律是正确的.CRE和CRM量值可观,且分布特征十分明显,是非常有价值的目标特性,可用于目标探测、定位等实际应用.
参 考 文 献
[1]ADEY R, BAYNHAM J. Predicting corrosion related electrical and magnetic fields using BEM[C]. Conf. Proc. UDT Europe,London:NATO,2000:473-475.
[2]ADEY R, BAYNHAM J.Predicting corrosion related signatures [J]. Simulation of Electro-chemical Processes II. WIT Transactions on Engineering Sciences,2007,54:213-223.
[3]RODRIGO F J, MARíA-DOLORES B, SáNCHEZ A. Underwater threats detection based on electric field influences[C]. Conf. Proc. UDT Europe, Hamburg, Germany, NATO,2010.
[4]DYMARKOWSKI K, UCZCIWEK J. Ships detection based on measurement of electric field in disturbance existing region [C]. Conf. Proc.UDT Europe,London, NATO,2000.
[5]WIMMER S A, HOGAN E A, DEGIORGI V G. Dipole modelling and sensor design[J]. Simulation of Electro-chemical Processes II. WIT Transactions on
Engineering Sciences,2007,54:143-152.
[6]KEDDIE A J, POCOCK M D, DEGIORGI V G. Fast solution techniques for corrosion and signatures modeling[J]. Simulation of Electro-chemical Processes II. WIT Transactions on Engineering Sciences,2007,54:225-234.
[7]DEMILIER L, DURAND C, RANNOU C, et al. Corrosion related electromagnetic signatures measurements and modelling on a 1:40th scaled model [J]. Simulation of Electro-chemical Processes II. WIT Transactions on Engineering Sciences,2007,54:368-370.
[8]陈聪.舰船电磁场的模型研究及深度换算[D].武汉:海军工程大学,2008.
[9]RAWLINS P G. Aspects of corrosion related magnetic (CRM) signature management[C]. Conf. Proc. UDT Europe,1998:237-242.
[10]ALLAN P J. Investigations of the magnetic fields from ships due corrosion and its countermeasures [D]. Glasgow: University of Glasgow,2004.
[11]陈聪,姚陆锋,蒋治国,等.浅海中潜艇腐蚀相关磁场特征预测[J].兵工学报,2014,35(6):864-871.
[12]陈聪,魏勇,姚陆锋,等.基于电流线等效的潜艇磁场估算与仿真[J].电子与信息学报,2015,37(2):461-467.
Experimental Verification of the Distribution Regularities
of the Static Corrosion-related-electromagnetic
Field Produced by a Submarine
FENG YaminCHEN CongFENG Hanchen
(CollegeofSciences,NavyUniversityofEngineering,Wuhan430033,China)
Abstract:In order to carry out the experimental verification of the static corrosion-related- electromagnetic field distribution regularities produced by a submarine in the shallow marine environment, according to the generation mechanism of the field, the experimental method is put forward in which the electric field and magnetic field distribution are synchronously confirmed, that is to say, electric scalar potential on the two underwater plane and three-component magnetic induction intensity on a test line producted by field source are synchronously measured. Parameters of field source will be obtained by using the electric scalar potential distribution on one plane,and then, the distribution of the electric scalar potential on another plane and the three-component magnetic induction intensity on a test line can be predicted. By comparing the measured data and predicted data, the results show that the theoretical analysis method and the conclusion is correct.And the three-layered shallow sea environment is simulated in the laboratory, with the help of a submarine physical scale model, the experimental validation process above has been completed, which indicates the distribution regularities of the static corrosion-related-electromagnetic field produced by a submarine in the shallow marine environment is correct.
Key words:ordnance science and technology; static corrosion-related-electromagnetic field; three-layered conductive media model; physical scale model; experimental validation
收稿日期:2015-11-27
doi:10.3963/j.issn.2095-3844.2016.01.029
中图法分类号:O441.1
