新型电动车用无刷直流电机回馈制动控制技术
2016-01-28宋哲
宋 哲
(中国科学院 电工研究所,北京 100190)
新型电动车用无刷直流电机回馈制动控制技术
宋哲
(中国科学院 电工研究所,北京100190)
摘要:分析了无刷直流电机低速能量回馈制动控制的基本原理;针对回馈电流恒定的制动方式中,电流经功率器件的二极管产生损耗较大的缺点,提出了基于同步整流技术的能量回馈制动控制新方法。该方法在回馈制动的续流阶段和充电阶段,反向导通功率管的开关器件代替二极管作为电流回路,以此降低回馈电路上的通态压降,减小功率损耗,达到高效驱动的目的。通过对该方法的分析,得出了调制导通功率器件的逻辑顺序,并根据工程应用进行了相关简化。仿真和试验结果表明,在制动中采用此方法既能高效回馈能量,又能明显缩短制动时间。
关键词:无刷直流电机; 同步整流; 回馈制动; 高效
0引言
无刷直流电机由于其无换向器、调速性能好等优点已广泛应用于电动车驱动系统中。在电动车运行过程中,有时要根据实际情况进行减速或制动。常见的制动方式有机械制动和电气制动,其中电气制动方式包括能耗制动、反接制动和回馈制动[1-3]。机械制动直接将机械能转化为热能,制动方式简单可靠[4];能耗制动是将系统的动能转换成电能消耗在制动电阻上[5];反接制动是将电机绕组接向电源的极性对调,制动效果明显,但是需要电源提供制动电流[6]。
上述制动方式,均不能有效地回收和利用能量,而回馈制动则可以将机械能转化为电能回馈到储能装置。其常用的控制方式有: 最大允许制动转矩控制方式、基于能量回馈曲线(制动曲线)的控制方式和回馈电流恒定的控制方式[7-9]。最大允许制动转矩控制方式能够提供最大回馈电流,但其制动的动态波动性较大,可靠性较低;基于能量回馈曲线的控制方式可以实现制动的安全平稳,但限制因素较多,控制复杂;回馈电流恒定的控制方式,由于控制方式简单,回馈效果较好,得到了广泛的研究和应用[10-12]。
采用回馈电流恒定的恒转矩制动控制方式时,电流经二极管产生较大压降,回馈电路的功率损耗比较明显,尤其是在低速大电流制动控制中[13-15]。对此,本文提出了基于同步整流的回馈制动控制新方法,即在回馈制动的同时利用同步整流技术,反向导通开关器件代替二极管作为电流回路。由于开关器件的通态电阻很小,因此利用同步整流技术可减小回路压降,降低功率损耗,实现高效回馈制动。
1回馈制动原理分析
回馈制动一般发生在电机转速低于额定转速时,因此称之为低速能量回馈制动[16]。在制动过程中电机产生与运行方向相反的电磁转矩,同时将电机的动能转化为电能回馈至蓄电池。但只有当电机端电压高于直流侧端电压时,电机才能向蓄电池输出电能。低速能量回馈制动时电机两相绕组串联后线电势的幅值2e总是低于蓄电池的直流母线电压Ud,因此无法直接回馈。由于电机绕组属感性元件,故可利用升压斩波原理[17]。一个PWM调制周期内电流波如图1所示。在一个PWM周期内,当t0~t1时,绕组电感储能,回路电流上升,此阶段称之为续流阶段;当t1~t2时,绕组电感放电,向蓄电池充电,回路电流下降,此阶段称之为充电阶段。
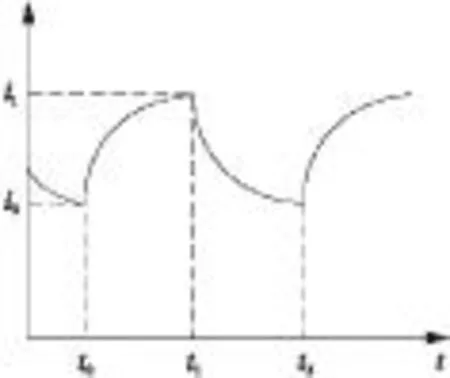
图1 一个PWM调制周期内电流波形
在回馈制动时,常采用半桥斩波的调制方式,即只对相同半桥上的3只功率器件进行PWM调制(如下半桥VT4、VT6、VT2);而另外半桥上的3只功率器件总保持截止(如上半桥VT1、VT3、VT5)。图2为电机制动时的功率管导通逻辑,上桥臂3个功率管全部关断,反电势为最大值相的下桥臂功率管斩波。
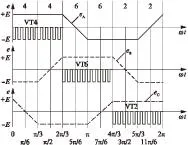
图2 回馈制动功率管导通逻辑
以A、B相导通时制动为例进行分析,该过程只有VT4有开关动作。在区间0~2π/3为续流阶段,调制导通VT4,通过PWM控制泵升电压和续流电流的大小,电流回路为A相→VT4→VD6→B相,电路原理如图3(a)所示;在区间2π/3~4π/3和4π/3~2π为充电阶段,调制关断VT4,此时泵升电压高于直流母线端电压,向蓄电池回馈能量,电流回路为A相→VD1→电源正→电源负→VD6→B相,电路原理如图3(b)所示。
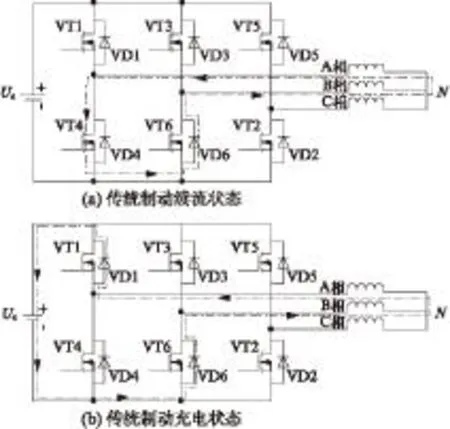
图3 回馈制动电流回路
根据制动时的导通逻辑,采用半桥斩波的调制方式,一个周期电机有3个状态,每120°电角度换相一次,功率管开关器件的导通顺序[18]如表1所示。
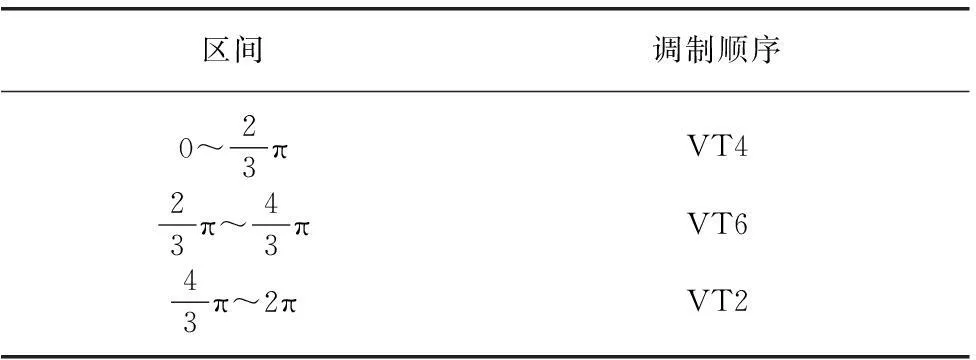
表1 回馈制动导通顺序
回馈电流i的大小与反电势的大小及功率管触发脉冲的占空比有关: 反电势越大,则回馈电流越大;占空比越大,则回馈电流越大。因此,在反电势一定的情况下,调节功率管开关器件的PWM占空比就能控制回馈电流i,进而控制制动转矩。在制动过程中,常采用回馈电流恒定的控制方式[19-21],转矩给定值与电机实际转矩的差值通过控制器调节PWM的占空比,从而控制回馈电流i的恒定,使制动转矩跟随给定转矩的参考值变化,实现制动的恒转矩闭环控制。
2新型控制方法分析
在恒转矩制动控制的续流阶段和充电阶段,回馈电流都会流经功率器件的二极管。由于二极管的通态压降较大,回馈电流明显减小,因而产生较大的功率损耗。为了减小回路压降,实现高效驱动,本文提出了基于同步整流的新型制动控制方式。利用功率器件可反向导通,且通态电阻较小的特点,在回馈制动中反向导通开关器件代替二极管作为电流回路,以此降低制动时电流回路的压降,减小功率损耗,提高能量回馈的系统效率。
以A、B相导通时制动为例,在0~2π/3为区间的续流阶段,调制导通VT4的同时导通VT6,代替VD6作为续流回路,电流回路为A相→VT4→VT6→B相,电路原理如图4(a)所示;在2π/3~4π/3和4π/3~2π的充电阶段,调制关断VT4同时开起VT1,代替VD1作为充电回路,电流回路为A相→VT1→电源正→电源负→VT6→B相,电路原理如图4(b)所示。
采用新型控制方法必须实时检测泵升电压,如果泵升电压高于直流母线电压,则在充电阶段可以调制导通VT1,代替VD1作为充电回路,以减小压降;如果泵升电压低于直流母线电压,则在充电阶段必须调制关断VT1,利用二极管VD1的单向导电性,截止电流反向,保证电磁转矩仍为制动性质。
根据以上分析,采用基于同步整流的回馈制动方法,一个周期电机同样有3个状态,也是每120°电角度换相一次,功率管开关器件的导通顺序如表2所示。
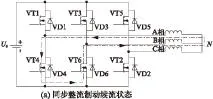
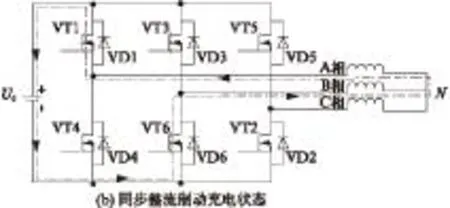
图4 同步整流的回馈制动
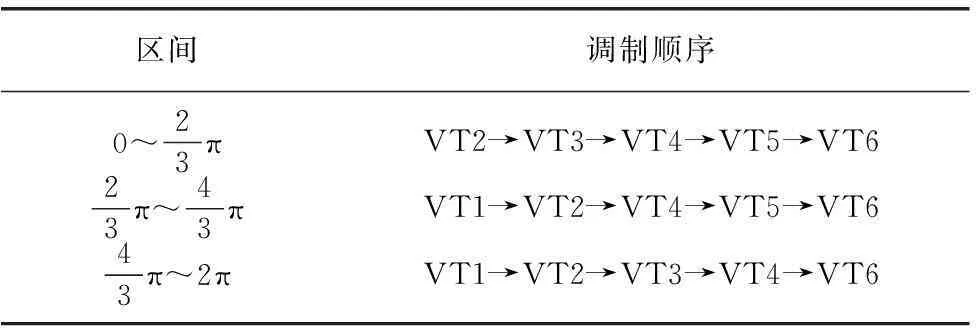
区间调制顺序0~23πVT2→VT3→VT4→VT5→VT623π~43πVT1→VT2→VT4→VT5→VT643π~2πVT1→VT2→VT3→VT4→VT6
但在实际应用中,考虑到制动的快速性和回馈的效果,同时为了使控制简单,常对以上导通顺序进行简化。仍以A、B相导通时进行制动为例,在0~2π/3的续流阶段,可以调制导通VT6,代替VD6作为续流回路;而充电阶段对应在2π/3~4π/3和4π/3~2π,与续流区间0~2π/3相邻的区间为2π/3~4π/3,制动的快速性决定了在区间4π/3~2π的回馈效果甚微,因此在充电阶段可只针对2π/3~4π/3区间进行同步整流。此时仍然需要实时检测泵升电压并同直流母线电压相比较,以保证制动性的电磁转矩。简化后功率管开关器件的导通顺序如表3所示:
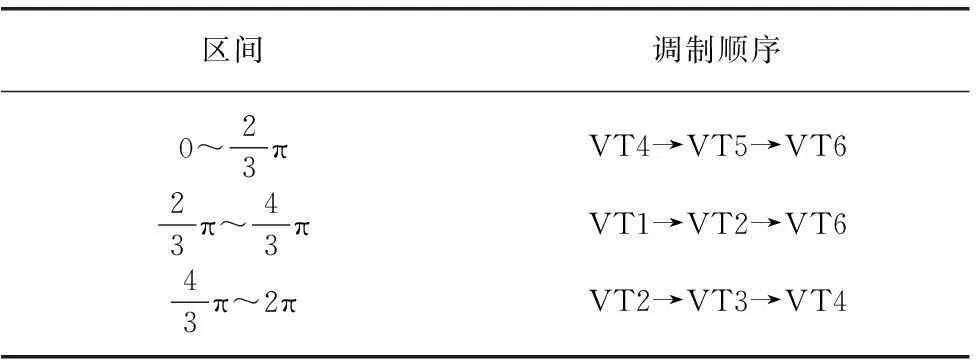
表3 简化后制动导通顺序
3试验研究
3.1仿真分析
基于MATLAB/Simulink建立无刷直流电机驱动系统,电动运行采用双闭环控制策略,回馈制动中采用PI控制,以实现回馈电流的恒流控制。使用的方波型无刷直流电机具体参数如下: 额定电压U=48V,额定功率P=185W,极对数p=4,每相电阻R=0.6Ω,每相电感L=0.93mH,开关频率f=15kHz。
图5为电机运行在2000r/min时,采用传统控制方法制动的电机转速和转矩仿真波形。可以看出,当转速降低到一定程度时,制动转矩和制动能力变小,转速的加速度减弱,转速下降趋于平缓。

图5 传统制动方法转速转矩仿真波形
图6为电机运行在2000r/min时,采用新型控制方法制动的电机转速和转矩仿真波形。开始制动时转速较高,泵升电压较大,在续流阶段和充电阶段均采用同步整流技术,制动转矩较大,转速下降明显;当转速降低到一定程度时,泵升电压减小,只在续流阶段采用同步整流技术,制动转矩减小,转速下降较为平缓。
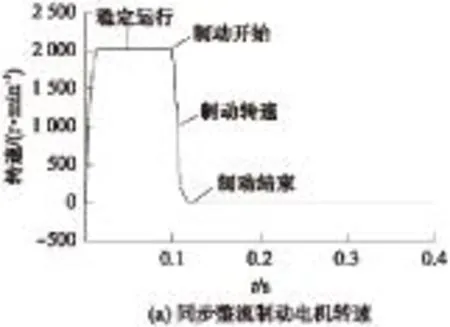
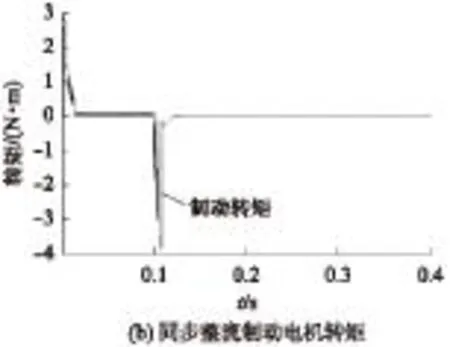
图6 同步整流制动转速转矩仿真波形
3.2试验分析
以ST公司的STM8S903K3为控制芯片搭建试验平台,通过芯片内部A/D模块实现电流的实时采样,利用软件编程完成数字PI的调节功能。图7~图9为电机运行在800r/min时,采用两种不同制动方法得到的试验波形。
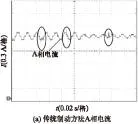
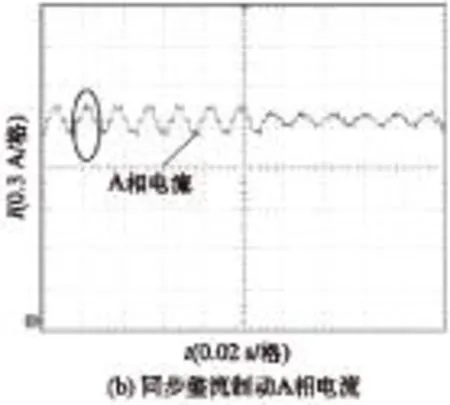
图7 A相电流试验波形
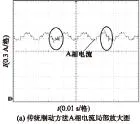

图8 A相电流局部放大波形
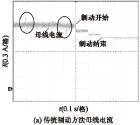
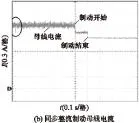
图9 直流母线电流试验波形
图7是回馈制动时A相电流的试验波形,图8是图7的局部放大。对比发现采用新型制动控制方式,单相电流波形更趋近于120°理想方波,基本消除了电流尖峰,有利于减小回路功耗,实现高效驱动。
图9是回馈制动时的直流母线电流试验波形。可以看出,采用传统制动方法得到的直流母线电流缓慢减小,制动时间稍长,约为0.2s;采用新型制动方法得到的直流母线电流迅速减小,制动时间较短,约为0.1s。当电机转速降低到一定程度时,动能减小,无法维持给定的参考转矩,PI控制器饱和,因此图9(a)中电流存在明显的波动变化。新型控制方法由于采用了同步整流技术,回路压降较小,制动迅速,因此图9(b)中电流波动变化不大。
4结语
为实现电动车用无刷直流电机高效回馈制动控制,提出了基于同步整流技术的能量回馈制动控制方式,得到以下结论:
(1) 本文以常用的PWM半桥斩波方式为例进行了分析,在传统恒转矩制动控制的基础上引入同步整流技术,形成了新型的控制方法,该方法同样适用于全桥斩波方式;
(2) 提出的新型回馈制动控制技术,不改变电路结构,采用软件编程实现,且不受系统开环、闭环控制策略影响;
(3) 试验验证了所提控制方式能够有效地实现无刷直流电机的回馈制动,取得较佳的制动和节能效果,为实际工程应用提供了新的方法和思路。
【参 考 文 献】
[1]LIN X Z, PING L. A novel control method of brake test bench [C]∥World Automation Congress Puerto Vallarta, Mexico: IEEE, 2012: 141-143.
[2]胡庆波,郑继文,吕征宇.混合动力中无刷直流电机反接制动PWM调制方式的研究[J].中国电机工程学报,2007,27(30): 87-91.
[3]YONG X X, YU T, JUN W Z, et al. Control of a BLDC motor for electromechanical cctuator[C]∥International Conference Electrical Machines and Systems. Wuhan, China: IEEE, 2008: 3266-3269.
[4]WALKER A M, LAMPERTH M U, WILKINS S. On friction braking demand with regenerative braking[C]∥20th Annual Brake Colloquium and Exhibition. Phoenix, AZ, USA: Electronics, 2002: 2581-2587.
[5]韦统振,吴理心,韩立博,等.基于超级电容器储能的交直流变频驱动系统制动能量综合回收利用方法研究[J].中国电机工程学报,2014,34(24): 4076-4083.
[6]DAS B, CHAKRABARTI S, KASARI P R, et al. Novel reverse regeneration technique of BLDC motor for capacitor charging[C]∥International Conference on Control, Instrumentation, Energy and Commun-ication, Calcutta, India: IEEE, 2014: 246-253.
[7]BING G C, ZHI F B, WEI Z. Research on control for regenerative braking of electric vehicle [C]∥International Conference on Vehicular Electronics and Safety. Shaan'xi, China: IEEE, 2005: 92-97.
[8]WILLIAMSON S S, EMADI A, RAJASHEKARA K. Comprehensive efficiency modeling of electric traction motor drives for hybrid electric vehicle propulsion applications[J]. IEEE Transactions on Vehicular Technology, 2007, 56(4): 1561-1572.
[9]ZHOU L, LUO Y, YANG D, et al. A novel brake control strategy for electric vehicles based on slip trial method [C]∥International Conference on Vehicular Electronics and Safety, Beijing, China: IEEE, 2007: 1-6.
[10]卢东斌,欧阳明高,谷靖,等.电动汽车永磁同步电机最优制动能量回馈控制[J].中国电机工程学报,2013,33(03): 83-91.
[11]JI F Z, LIU L J. Study on braking stability of electro-mechanical hybrid braking system in electric vehicles based on ECE Regulation[C]∥International Conference on Computer Distributed Control and Intelligent Environmental Monitoring, Changsha, China: IEEE, 2011: 19-20.
[12]BOBBA P B, RAJAGOPAL K R. Modeling and analysis of hybrid energy storage systems used in electric vehicles[C]∥IEEE International Conference on Power Electronics, Drives and Energy Systems. Bengaluru, India: IEEE, 2012: 1-6.
[13]NIAN X H, PENG F, ZHANG H. Regenerative braking system of electric vehicle driven by brushless DC motor[J]. IEEE Transactions on Industrial Electronics, 2014,61(10): 5798-5808.
[14]YAO N W, XI Z Z, XIAO F Y, et al. Position-sensorless hybrid sliding-mode control of electric vehicles with brushless DC motor[J]. IEEE Transactions on Vehicular Technology, 2011,60(2): 421-432.
[15]JIAN B C, BING G C. Fuzzy-logic-based sliding mode controller design for position-sensorless electric vehicle[J]. IEEE Transactions on Power Electr-onics, 2009,24(10): 2368-2378.
[16]ROWE A, SEN G G, DEMIDENKO S. Instrumentation and Control of a high power BLDC motor for small vehicle applications[C]∥IEEE International Instru-mentation and Measurement Techn-ology Conference, Graz, Austria: IEEE, 2012: 559-564.
[17]李广海,叶勇,蒋静坪.3kW开关磁阻电机的再生制动实现[J]. 中国电机工程学报,2004,24(2): 124-128.
[18]刘军,李金飞,俞金寿.无刷直流伺服电机四象限运行分析[J].上海交通大学学报,2009,43(12): 1910-1915.
[19]CUI W, ZHANG H, MA Y L, et al. Regenerative braking control method and optimal scheme for electric motorcycle[C]∥International Conference on Power Engineering, Energy and Electrical Drives. Malaga, Spain: IEEE, 2011: 1-6.
[20]JOICE C S, PARANJOTHI S R, KUMAR V J S. Digital control strategy for four quadrant operation of three phase BLDC motor with load variations[J]. IEEE Transactions on Industrial Informatics, 2013,9(2): 974-982.
[21]YANG M J, JHOU H L, MA B Y, et al. A cost-effective method of electric brake with energy regeneration for electric vehicles[J]. IEEE Transactions on Industrial Electronics, 2009,56(6): 2203-2212.
[主要栏目]
·综述·研究与设计·变频与调速·控制与应用技术
·应用·运行与保护·新产品介绍·新能源与风力发电
·电机系统节能·测试技术与检测设备·行业信息
引领技术发展趋势报道经典实用案例反映行业最新动态
A Novel Regenerative Braking Control Strategy of Brushless
DC Motor for Electric Vehicles
SONGZhe
(Institute of Electrical Engineering, Chinese Academy of Sciences, Beijing 100190, China)
Abstract:The principle of regenerative braking control of brushless DC motor was analyzed. A novel regenerative braking control strategy based on synchronous rectification was proposed to resolve the large loss problem of diode when the current through that used the traditional control. Conducting switches instead of diodes as a current loop reversely in the freewheeling state and the charge state, so the voltage drop on the power devices and the power losses reduced and the efficiency of the drive system improved. After analyzing the principle of the presented control method, logical modulation sequence of switches during braking was achieved and simplified according to engineering applications. Experimental results proved that using the new strategy in braking control not only improved efficiency of energy feedback but also decreased braking time.
Key words:brushless DC motor; synchronous rectification; regenerative braking; high efficiency
收稿日期:2015-06-03
中图分类号:TM 331
文献标志码:A
文章编号:1673-6540(2015)12-0079-06
通讯作者:宋哲