直升机结构响应主动控制技术工程化应用研究
2015-12-28张永孝李强
张永孝,李强
(中航工业西安飞行自动控制研究所 飞控部,陕西 西安710065)
0 引言
机体的振动水平是评价直升机性能的一项重要指标。直升机飞行时由于旋翼、尾桨、发动机等动部件产生的激振力的作用,机体始终处在一个复杂且恶劣的振动环境中,不仅降低了结构部件的疲劳寿命与可靠性,影响机载设备正常工作,甚至引起结构失效,而且会干扰飞行员等空勤人员正常工作(研究资料显示,直升机40%的事故都与振动有关[1]),降低乘员的舒适性。随着直升机飞行速度的不断提高,这种影响变得更加突出。因此,控制振动水平成为直升机研制过程中最为关键的技术问题之一。
随着客户(军用标准或适航条例)对直升机振动水平的要求越来越高,传统的被动振动控制方法已很难满足要求。例如,现有仅使用被动式吸振/隔振装置的直升机几乎不可能达到美国陆军颁布的指令性文件ADS-27中提出的直升机振动水平要求(关键部位小于0.05g)。因此,国内外均积极开展了直升机振动主动控制技术方面的研究。经过多年发展,国外目前已经开始工程化应用,而国内基本还处于理论研究和原理验证阶段,针对工程化应用方面的研究极少。
本文对目前常见的几种直升机振动主动控制技术进行了介绍和分析,提出了基于结构响应主动控制的直升机振动主动控制系统工程化方案,并详细介绍了目前在直升机结构响应主动控制工程化应用方面的研究情况、进展及目标,为推进国内直升机振动主动控制技术的成熟应用提供了思路。
1 直升机振动主动控制技术发展现状
目前直升机振动主动控制技术主要包括高阶谐波控制(Higher Harmonic Control,HHC)、独立桨叶控制(Individual Blade Control,IBC)、结构响应主动控制(Active Control of Structure Responses,ACSR)等方法,其中结构响应主动控制技术在国外已经开始工程化应用[2-3]。
1.1 高阶谐波控制技术
直升机振动的激振力主要来自旋翼产生的交变气动载荷。高阶谐波控制技术采用闭环控制系统,根据直升机飞行过程中实时监测的振动反馈信号,以一定的控制规律在飞行控制舵机指令上叠加额外指令,产生额外的桨距角变化从而达到降低甚至消除旋翼传给机身的桨叶载荷交变分量,进而解决直升机机体振动问题,其原理(见图1)是通过输入一个桨距高阶谐波操纵量,使得桨叶在各个方位角上所产生的气动力接近相等,将传给机身的交变载荷分量减至最小。高阶谐波控制技术的研究在国外已经持续数十年,完成了原理性试验(美国及法国分别在OH-6A和SA349型直升机上进行了试验验证,德国也进行过相关试验)[2-5]。由于高阶谐波控制算法及执行机构均面临很大的技术挑战,至今尚未进入工程应用阶段。直升机电传飞行控制系统的普遍应用有利于突破高阶谐波控制在执行机构等应用方面的限制,将有效促进高阶谐波控制进入工程应用阶段。
1.2 独立桨叶控制技术
独立桨叶控制技术是通过单独控制每片桨叶的运动从而控制旋翼的振动。其原理(见图2)是通过在挥舞变距杆或桨叶上安装作动器,根据飞行过程中实时监控的振动反馈信号,按照一定的控制规律改变桨叶的气动参数,使桨叶产生的气动力发生变化,进而消除旋翼的不良振动。美国与德国曾合作开展相关的风洞试验,试验结果表明减振效果明显,此外德国还在CH-53G型直升机上开展了相关的飞行试验[2-5]。独立桨叶控制技术从振动根源采取措施且其消耗功率低,是直升机减振的热点技术之一。但由于其伺服作动器小型化制造、机上安装等难度较大,目前还处于原理验证阶段,距工程应用还有一定差距。目前国内仅开展了相关理论研究和原理验证试验等工作。
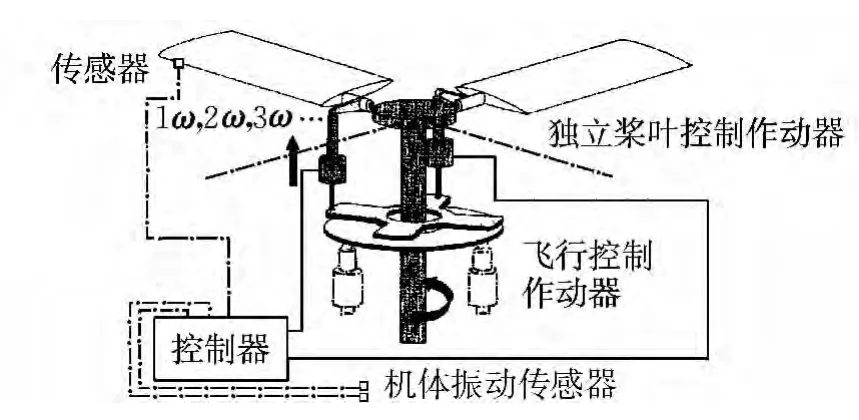
图2 独立桨叶控制原理图Fig.2 Schematic view of IBC
1.3 结构响应主动控制技术
与高阶谐波控制及独立桨叶控制相比,结构响应主动控制(见图3)的限制较少,不会导致桨叶弯矩和操纵载荷的增加,不会降低桨叶的失速裕度。结构响应主动控制是利用振动作动器的同频率、同幅值、反相位来抵消直升机机体振动。这种控制技术最早由英国韦斯特兰直升机公司于20世纪80年代提出,并在一架W30型直升机上进行飞行验证试验,试验中对比了采用结构响应主动控制技术与采用传统被动式减振技术的测试数据,发现前者的减振效果非常明显,并且在旋翼转速变化以及由过渡飞行转入悬停等飞行状态发生较大变化时,依然能够有效降低机体振动。
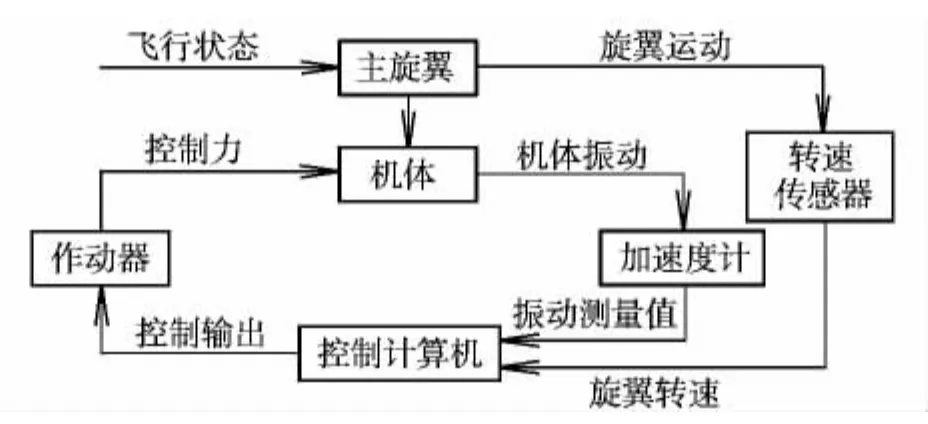
图3 结构响应主动控制原理图Fig.3 Schematic view of ACSR
相比于重量代价大、减振频率单一且不具备自检能力无法实现故障隔离的传统被动式减振技术,结构响应振动主动控制技术具有明显的优势,此外还具有工程上易实现等其他振动主动控制技术所不具备的优势。因此,在英国韦斯特兰直升机公司利用W30直升机进行了飞行测试后,美、德、法等国均开始投入大量人力、物力重点突破相关关键技术,包括多通道自适应控制律设计、高功率重量比作动器研制、作动器和传感器位置及数量优选等,并先后在EH101,CH-47,UH-60M,S-92 等多种机型上成功进行了飞行试验。近年来,上述国家的技术已逐渐发展成熟,S-92,UH-60M,EC225/EC725等直升机已正式装备了基于结构响应主动控制技术的振动主动控制系统,使直升机关键部位处的振动水平降至0.05g以下,这是采用被动式减振/隔振等措施所难以达到的[3-9]。
此外,在目前已经成为直升机技术研究热点的高速直升机方面,减振更是需要且必须突破的关键技术之一。美国西科斯基直升机公司在其最新研发的高速直升机X2上,为抑制高速飞行时严重非定常气动载荷所引起的强烈机体振动,将基于结构响应主动控制技术的振动主动控制系统列为该机必须装备的机载系统之一[7]。
国内对结构响应控制技术的研究起步于20世纪90年代,南京航空航天大学对相关关键技术均进行了深入的研究,包括大量的理论方法研究和模型试验研究,并采用基于自适应滤波的具有在线识别功能的时域自适应控制算法,以Z11轻型直升机为验证机在国内首次进行了直升机振动主动控制技术飞行试验,验证了算法的有效性,但也暴露出控制算法的稳定性和鲁棒性还有待进一步提高[6]。此外,国内相关研究尚未涉及故障监控与重构、多作动器间控制分配、同步协调等工程化问题,因此,国内在实现直升机振动主动控制技术的工程应用还有很长的路要走。
2 直升机结构响应主动控制系统
结构响应主动控制技术结合了反共振隔振概念与现代控制技术,通过一套传感器(加速度计)对直升机机体的主要激振载荷进行测量,经过控制器(控制计算机)对测量数据进行分析与计算(控制算法),获得相应的控制指令,通过作动装置(振动抑制作动器)施加在机体上,使机体产生一个反向振动与其固有振动相抵消,从而达到减振目的。
2.1 系统组成及原理
直升机结构响应主动控制系统包括控制计算机、伺服控制器、振动抑制作动器、加速度传感器、转速传感器、控制面板和电源转换器等部件,如图4所示。其中控制算法及软件、控制计算机及伺服作动分系统是直升机结构响应主动控制系统的关键部件和研制难点。
控制计算机负责采集分布于直升机关键部位的加速度传感器信号和旋翼转速传感器信号,得到机体振动信号及旋翼转速信号,振动控制算法利用控制计算机采集到的振动和转速信号完成控制律计算、生成控制律指令,并输出至伺服控制器,伺服控制器根据控制计算机发来的指令通过驱动电路驱动作动器输出相应力,该输出力激发的振动与机体固有振动相互抵消,从而达到减振目的。
控制面板作为系统与飞行员的交互界面,在上面设置有系统启动/关闭及自检测等开关与系统故障告警灯。加速度传感器及转速传感器可以采购成熟的货架产品。
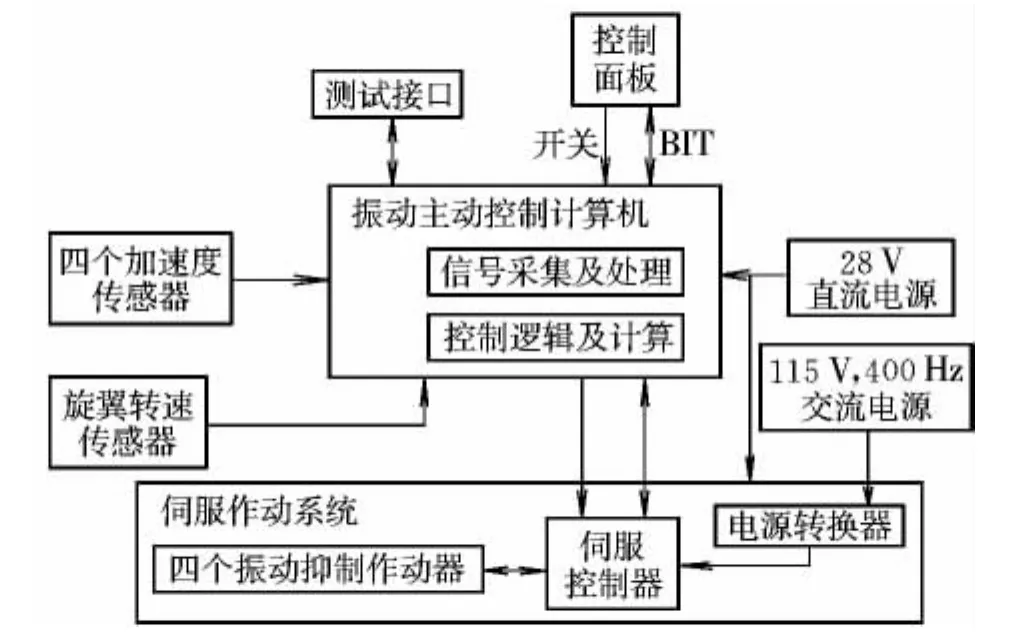
图4 直升机结构响应主动控制系统Fig.4 Active control system of helicopter structure response
2.2 系统重构
系统重构是在故障被检测确定之后,按照预定的方案对系统进行一定的再组织。例如当监控到部分传感器或作动器故障时,可以通过进行控制算法重构或切断系统输出,以补偿因故障而导致降级的控制品质或避免因故障而导致的危害。
由于结构响应主动控制技术的原理是用振动来抵消振动,所以当控制系统由于故障而施加非预期的激励时,将不仅无法降低机体振动,反而会加剧机体原有振动。在直升机振动主动控制系统的设计中应采取自监控等必要措施进行故障监控与故障隔离,避免此种情况的发生。在系统设计中可以借鉴飞行控制系统等机载系统采用的成熟通用技术,实现直升机振动主动控制系统故障监控与故障隔离功能。
2.3 控制算法及软件
直升机结构响应主动控制算法主要分为频域法和时域法两大类。
在频域法中,等待、采样和计算都需要较长的时间,其修正速率较慢。而且频域法一般都要经过几个信号周期才能修正一次,所以对所需要抵消的振动响应的跟踪能力不如时域法,控制的收敛速度就受到极大影响。相反如果采用时域控制律设计法,则能消除两个额外的等待时间,可以预见,控制的收敛速度将会得到极大提高。
在直升机结构响应主动控制系统中,两类算法均可使用。国外所见的研究和应用绝大部分都是在频域内进行的,国内对于时域法的研究较多。
2.4 控制计算机
控制计算机是直升机振动主动控制系统的核心部件。振动主动控制计算机具备以下主要功能:加速度传感器信号采集、旋翼转速传感器信号采集、控制律计算、控制策略、故障重构以及控制分配等。
如前所述,作为直升机结构响应主动控制系统的核心部件,具备以下主要功能:加速度传感器信号采集、旋翼转速传感器信号采集、控制律计算、系统调度以及故障监控与隔离等。此外,为了确保加速度传感器信号的同步性,为控制算法提供可靠机体振动状态信息,控制计算机在信号采集时应采取并行采集等方式,以提高多传感器信号的同步性。
2.5 伺服作动分系统
伺服作动分系统由伺服控制器和多台作动器组成。伺服控制器接受控制计算机的指令信号,并将指令信号按照一定比例系数放大后作为作动器的输出力信号,利用伺服控制电路控制作动器输出与指令信号频率相同、幅值成比例的直线输出力,该力使机体产生的振动与机体原有振动是同频率、同幅值,但相位相反,即两个振动相互抵消,从而达到减振目的。根据输出力的产生方式,作动器分为电磁式、离心式和压电式,它们的工作原理如下:
(1)电磁式作动器
电磁式作动器由直线电机和弹簧组件构成(见图5)。直线电机的输出力驱动弹簧运动,设置直线电机输出力的频率与弹簧机械结构的固有频率相同,将激发弹簧结构实现共振,增大作动器输出力,实现对控制指令的精确跟随。
电磁式作动器采用音圈电机作为驱动部件。作动器利用加载于音圈电机的功率电流信号激发作动器结构共振,输出用于振动主动控制的作用力。作动器内部设置专门的调频质量块,通过改变调频质量块的大小,可微调作动器的固有频率,以适应不同的机体结构。
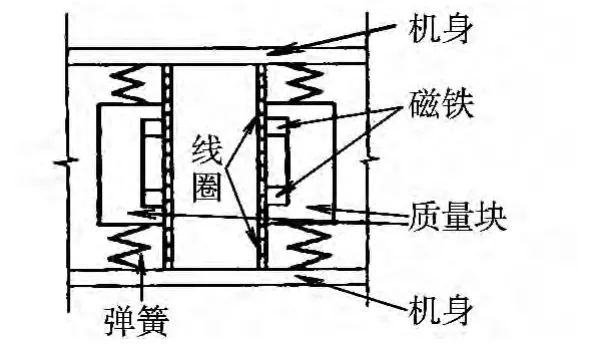
图5 电磁式作动器原理Fig.5 Schematic diagram of electromagnetic actuator
(2)离心式作动器
经过技术分析,离心式作动器在产品的体积重量、功率消耗、工作适应性及安装灵活性上均比电磁式作动器有明显优势,两种作动器的比较如表1所示。离心式作动器已成为国外直升机结构响应主动控制系统的主流配置。国外在黑鹰等直升机上已经大量使用离心式作动器,而国内相关原理验证试验中均采用电磁式作动器。以离心式作动器为参照物,在重量、体积及功耗方面,电磁式作动器均处于劣势,且离心式作动器还具有工作频率可调和、可靠性高等优势。离心式作动器虽然具有明显的应用优势,但其对伺服控制技术要求较高。

表1 电磁式与离心式作动器比较Table 1 Comparison of electromagnetic and centrifugal actuator
离心式作动器配置两组转向相反的偏心轮,在伺服电机的带动下偏心轮以恒定转速转动,偏心块的质量、偏心距、转速决定离心力的大小。如图6所示,同组偏心轮水平方向离心力分力抵消,仅对外产生垂直方向离心力分力,控制两组偏心轮旋转的相位差便可控制垂直方向离心力的矢量和,即最终输出力。
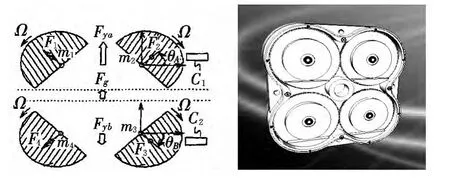
图6 离心式作动器原理Fig.6 Schematic diagram of centrifugal actuator
(3)压电式作动器
利用压电陶瓷等智能材料特性,采用多片压电纤维材料叠加的方式实现压电式作动器,目前欧洲直升机公司已经进行了试飞验证,国内目前还没有开展相关研究工作。
3 地面验证试验环境
为了验证系统功能及性能,建立直升机结构响应主动控制系统地面验证试验环境(国内外常见的验证环境见图7)。以试验模型为载体,利用激振器激振,模拟机上固有振动特性,通过安装在试验模型上的直升机结构响应主动控制系统进行振动控制,对比系统工作前后的振动差异,可以验证系统的性能等参数。
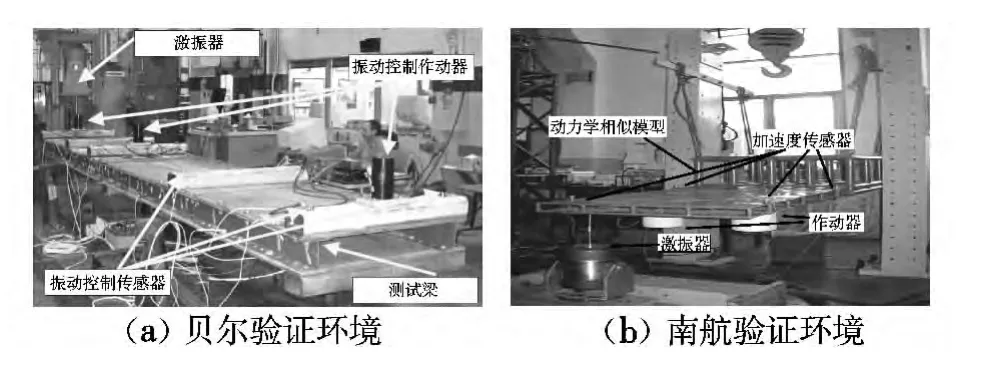
图7 国内外常见验证环境Fig.7 Laboratory test of BELL and NUAA
通过对国内外相关地面验证试验环境的分析,发现其工作原理是相同的(见图8)。其中机体动力学相似模型是对选取的目标直升机机体结构进行动力学特性分析后采取相应简化,最后将其等效为简单力学结构的组合。振动激励系统用于模拟机上振源激励机体动力学相似模型产生与真实直升机机体相似的振动,为直升机振动主动控制系统提供控制对象。通过在振动激励系统增加指令干扰,可以模拟直升机空中飞行时的扰动,使地面试验更加贴近实际飞行状态。地面验证试验环境将对完成直升机结构响应主动控制系统装机前的功能、性能及故障模拟试验提供有力支撑。
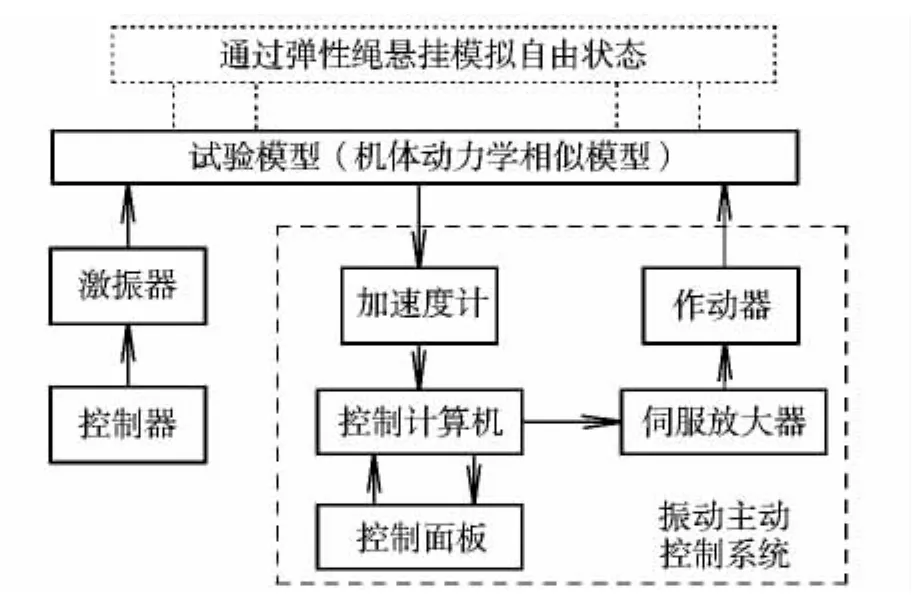
图8 地面验证试验原理Fig.8 Schematic diagram of laboratory test
4 结束语
直升机结构响应主动控制系统在国外已经实现工程化应用,甚至在西科斯基最新的高速直升机X2上已经成为解决大速度飞行时振动问题的必需系统。但是在工程实现方面,国外公开资料很少提及技术细节,国内也主要关注于控制算法及关键部件等技术点,没有开展面向工程化应用的系统性研究。
本文在介绍目前常见的几种直升机振动主动控制技术的基础上,针对直升机结构响应主动控制技术的工程化应用,对其系统方案、关键部件及地面验证技术进行了详细分析,对不同的控制算法和作动器等关键部件进行了对比,为后续直升机结构响应主动控制系统的工程化研制及推进国内直升机振动主动控制技术的成熟应用提供了思路。
[1] 刘孝辉,徐新喜,白松,等.军用直升机振动与噪声控制技术[J].直升机技术,2013(1):67-72.
[2] Vignal B,Krysinski T.Development and qualification of active vibration control system for the Eurocopter EC225/EC725[C]//American Helicopter Society 61st Annual Forum.Grapevine,USA,2005:96-106.
[3] 尹春望,童国荣.直升机振动水平控制技术途径探讨[J].直升机技术,2009(4):26-30.
[4] 梅振景.直升机结构响应鲁棒控制研究[D].南京:南京航空航天大学,2007.
[5] Wickramasinghe Viresh,Zimcik David,Chen Yong.A novel adaptive structural impedance control approach to suppress aircraft vibration and noise[R].RTO-MP-AVT-110,2004.
[6] 陆洋,顾仲权,凌爱民,等.直升机结构响应主动控制飞行试验[J].振动工程学报,2012,25(1):24-29.
[7] Blackwell R,Millott T.Dynamic design characteristics of the Sikorsky X2 technology demonstrator aircraft[C]//American Helicopter Society 65th Annual Forum.Montreal,Canada,2008:712-729.
[8] 陆轶,顾仲权.直升机结构响应主动控制作动器优化设计研究[J].振动与冲击,2007,26(3):23-26.
[9] 杨铁军,顾仲权.基于误差通道在线辨识的直升机结构振动主动控制研究[J].航空学报,2004,25(1):36-40.