大型飞机襟缝翼自动保护控制律设计与仿真
2015-12-28朱妍王博安刚高亚奎
朱妍,王博,安刚,高亚奎
(中航工业西安飞机设计研究所 飞行控制律研究室,陕西 西安710089)
0 引言
大型飞机的襟缝翼用于起降阶段增升增阻,其偏角必须与飞行状态完全对应,因此该翼面的正确偏转对飞行安全起着举足轻重的作用[1]。如在起飞阶段,放下襟缝翼至起飞偏角来增大机翼面积、增加飞机升力,在达到一定起飞高度和速度后,才允许分步收起,减小阻力,继续爬升。此时若过早收起襟缝翼,则会引起升力不足,高度下降,甚至失速[2]。
当前国内对飞机襟缝翼的操纵都是通过飞行员手动完成。在整个过程中,飞行员必须注意力高度集中,通过操纵将大量飞行参数保持在一定范围内,工作负担十分繁重。因此,在飞控系统设计时必须对可能出现的飞行员误操作或危及飞机本体安全问题进行全面的分析,建立排除这些安全隐患的方法,使飞控系统具备减轻飞行员工作负担以及在出现错误操作时,及时有效地代替飞行员正确控制襟缝翼的能力。国外电传飞机如A340,B777等,均具有自动襟翼、自动缝翼功能,以提高飞机起降阶段的飞行安全[3]。
1 襟缝翼自动保护控制原理
在飞行阶段,襟缝翼的偏转需要满足起降阶段飞行安全的条件。若大速度时,襟缝翼保持较大偏角,则会超出机翼结构强度限制,引起结构破坏;小速度时,襟缝翼若保持较小偏角,则会引起飞机升力不足,甚至导致飞机失速,所以,必须将最大允许速度要求和最小失速速度要求来作为控制襟缝翼偏转的速度限制。适航标准25.107和25.125[4]中对运输类飞机的起飞和着陆阶段的速度要求都作了详细的规定,这些速度要求是以一定的失速速度Vs余量给出。而失速速度是随飞行状态和襟缝翼构型变化的数值,无法通过当前飞行速度V与适航要求的速度直接比较控制襟缝翼偏转。但在确定的飞行重量G和高度下,升力系数由飞机构型确定,由升力公式可知,此时飞行速度仅与升力系数Cy(δf)相关。因此,当飞机平飞时,可建立飞行速度和飞机构型的关系[5]:

飞机以不同高升力构型,保持最大允许速度和最小失速速度要求平飞时,由其襟缝翼偏角δf及飞机在该偏角下所对应的平飞升力系数,可确定出飞机的最小失速速度边界线和最大允许速度边界,示意图如图1所示。飞机在飞行中,通过当前平飞升力系数,在两条边界线中确定合理的襟缝翼偏角。
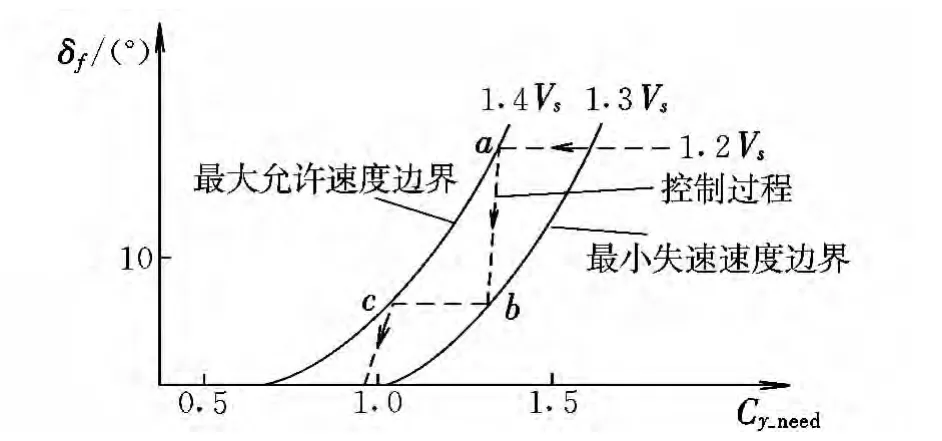
图1 起飞阶段襟缝翼自动收起过程示意图Fig.1 Schematic diagram for automatic retraction of flaps and slats during take-off
图1 表明了飞机在起飞阶段收起襟缝翼的过程。飞机以起飞构型,即襟缝翼处于起飞位置,加速到1.4Vs(a点),达到最大允许速度限制,此时收回襟缝翼。当襟缝翼偏角逐渐减小,引起升力系数减小,相应的失速边界增加,当飞行速度达到最小失速速度限制1.3Vs(b点),停止收起,襟缝翼保持此时偏角。飞机以此构型继续加速达到1.4Vs限制(c点)时,重复之前的过程,直到襟缝翼完全收起[2]。
2 算法描述
根据飞机在巡航、起飞和着陆构型的高升力偏角与该构型对应的平飞升力系数,可计算出相应的速度限制包线,如图2所示。
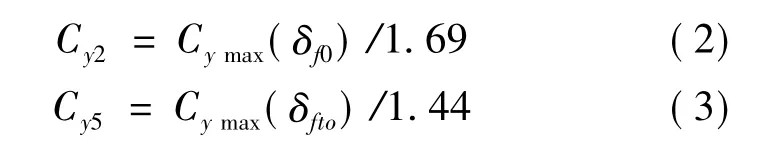
设 δf0,δfto,δfL分别为襟缝翼在巡航、起飞和着陆构型的偏角,为使飞行速度相对失速速度具有一定的安全余量,飞机以这三种构型,保持1.3,1.2和1.2倍[6]的最小失速速度要求平飞时的升力系数Cy2,Cy5和 Cy6计算公式如下:

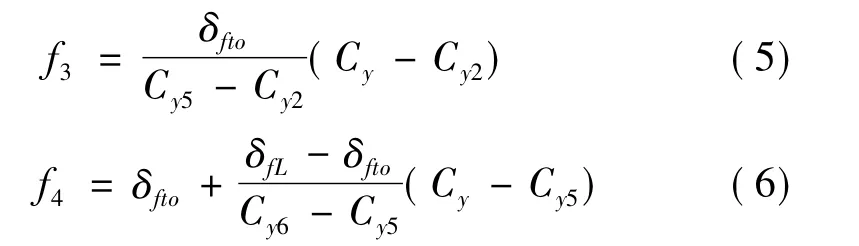
那么,图2中最小失速边界线 f3和f4计算方程为:
同理,飞机以这三种构型,保持1.6倍[6]的最大允许速度要求平飞时的升力系数Cy1,Cy3和Cy4的计算公式如下:

那么,最大失速允许边界线 f1和f2计算方程为:
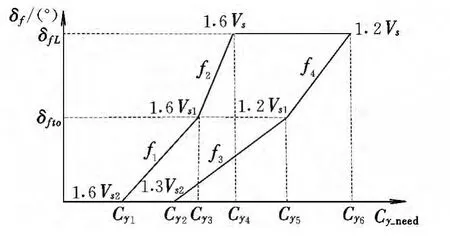
图2 飞行速度限制包线Fig.2 Flight velocity limitation Envelope
襟缝翼自动保护控制律在工作时,通过飞机当前飞行高度、速度、重量和襟缝翼偏度,根据升力公式计算平飞所需升力系数Cy_need,并在图2中的限制包线内判断和确定襟缝翼的合理偏角。具体控制律算法如下:
(1)当手柄位置xfs=0,襟缝翼偏角δ0f和偏转速率满足公式:
(2)当手柄位置xfs=1,襟缝翼偏角δ1f和偏转速率满足公式:

(3)当手柄位置xfs=2,襟缝翼偏角δ2f和偏转速率满足公式:
3 仿真结果及分析
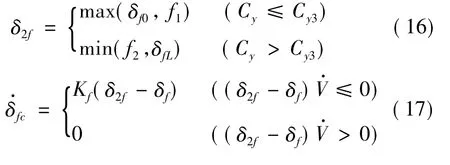
以某大型飞机为例,在飞机质量150 000 kg,仿真初始速度310 km/h、初始高度120 m,襟缝翼处于起飞构型、飞机继续爬升的状态,进行驾驶员未操纵襟缝翼的飞行仿真,如图3所示。仿真结果表明,襟缝翼手柄保持在起飞位置,在速度达到350 km/h时,满足最大允许速度条件,襟翼从25°收回至0°,缝翼从20°收回至0°,飞机保持继续爬升的趋势,未出现掉高、减速的现象。
图3 起飞阶段襟缝翼自动收起仿真曲线Fig.3 Simulation curves of automatic retraction of flaps and slats during take-off
以飞机质量160 000 kg,仿真初始速度346 km/h,飞行高度400 m,襟缝翼处于巡航构型、飞机持续下滑的状态,进行驾驶员未操纵襟缝翼的飞行仿真,如图4所示。仿真结果表明,襟缝翼手柄保持在巡航位置,在速度达到340 km/h时,满足最小失速速度条件,襟翼从0°偏转至40°,缝翼从0°偏转至30°,保持飞机下滑着陆状态。
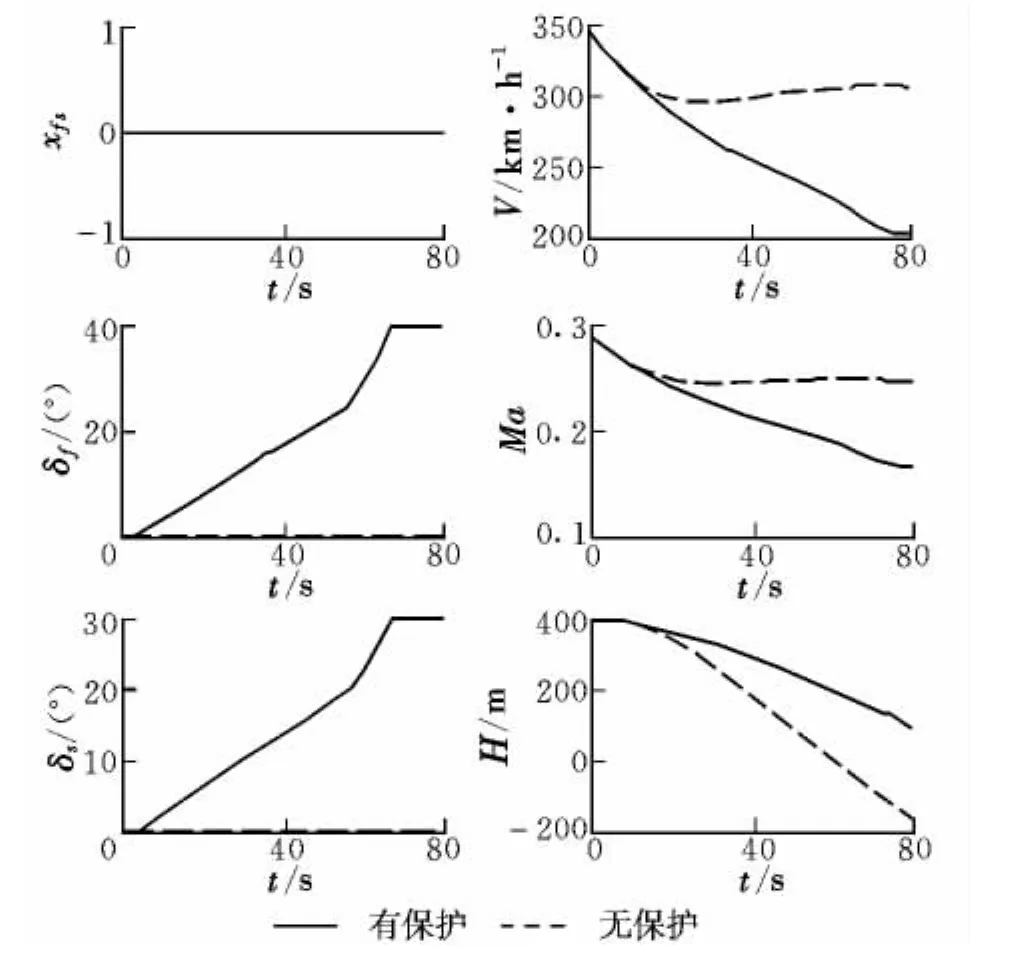
图4 着陆阶段襟缝翼自动放下仿真曲线Fig.4 Simulation curves of automatic extending of flaps and slats during landing
以飞机质量140 000 kg,仿真初始速度410 km/h,飞行高度1 000 m,襟缝翼处于巡航构型、飞机持续下滑的状态,进行驾驶员提前放下襟缝翼的飞行仿真,如图5所示。结果表明,在速度为500 km/h时,襟缝翼手柄从巡航位置放置到着陆位置,但此时飞行速度较大,达到最大速度边界,所以襟翼和缝翼未放下至着陆位置。
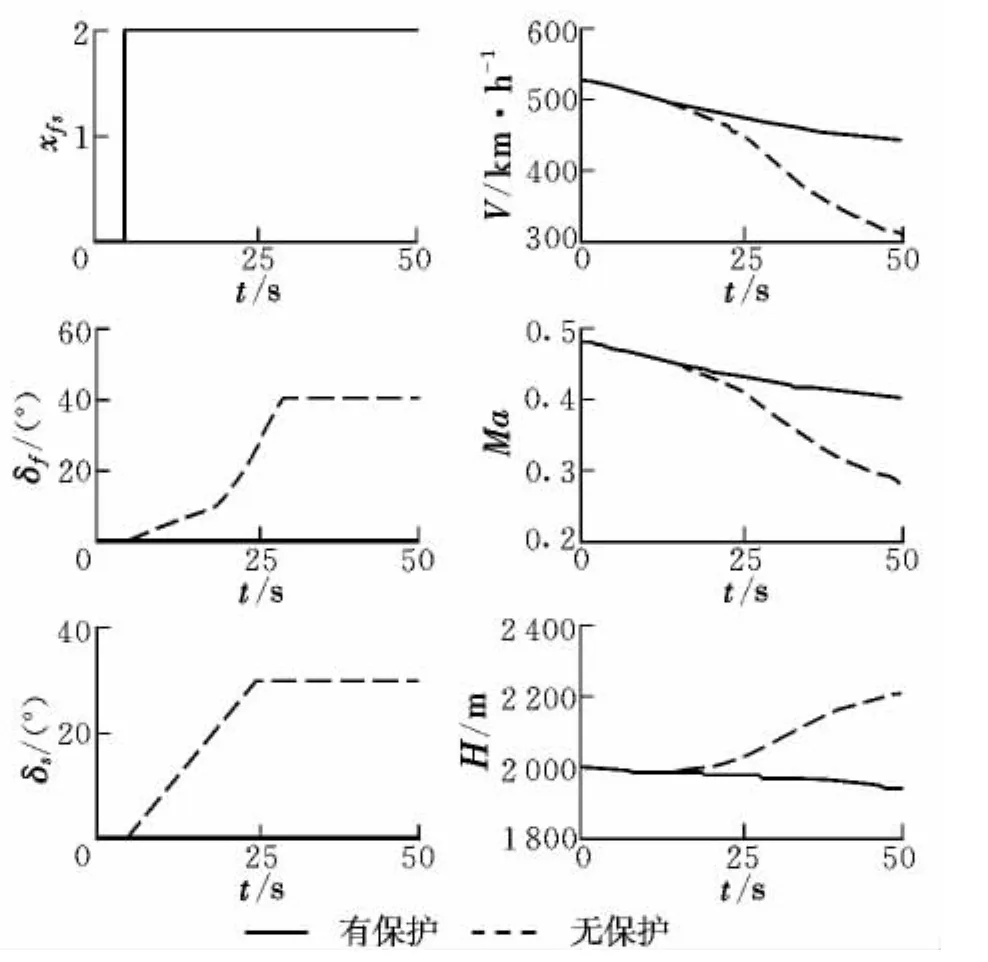
图5 着陆阶段阻止襟缝翼提前放下仿真曲线Fig.5 Simulation curves of prevention for early extending of flaps and slats during landing
以上仿真结果表明,采用上述控制律设计方法进行襟缝翼控制时,可在飞行速度未达到最大允许速度和最小失速速度限制条件时,完成飞行员手动操作襟缝翼;若飞行员操纵失误,达到限制条件时,自动偏转襟缝翼至合理偏度,达到安全保护的目的。
4 结束语
本文研究了飞行速度对襟缝翼构型的要求以及二者之间的关系,提出了一种大型飞机的襟缝翼控制律设计方法,保证了襟缝翼在飞行员误操纵的情况下,判断并控制襟缝翼偏转至正确位置。该方法原理简单、工程中易于实现,仿真结果验证了该控制律的有效性,对电传飞机高升力控制系统设计具有较高的参考价值。
[1] The Boeing Company Co-Chair Upset Recovery Industry.Airplane upset recovery training aid[Z].USA:Boeing Company,2004:21-24.
[2] ГС比施根斯.干线飞机空气动力学和飞行力学[M].孙荣科,译.北京:航空工业出版社,1996:280-282.
[3] Rudolph PK C.High lift systems on commercial subsonic airliners[R].NASA Contractor Report 4746,1996:59-74.
[4] 中国民用航空局.CCAR-25-R4 运输类飞机适航标准[S].北京:中国民用航空局,2011.
[5] 金长江,范立钦.飞行动力学[M].北京:国防工业出版社,1990:87-89.
[6] 《飞机设计手册》总编委会.飞机设计手册:第六册[M].北京:航空工业出版社,2002:713-735.
