基于LQR的二级旋转倒立摆电液控制系统研究
2015-11-26曾绍平张超
曾绍平,张超
(1.江西工业职业技术学院机械工程分院,江西南昌330039;
2.江苏城乡建设职业学院公用事业系,江苏常州213016)
0 前言
目前,顺着控制技术和计算机技术的快速发展,各种电液控制系统面向高度集成化、精确度高、非线性强和稳定性好的方向发展[1]。作为一种检测比较控制算法的实验平台,倒立摆 (Inverted Pendulum)装置在电液控制系统中得到广泛应用。原因在于倒立摆装置的特性 (高阶次、不稳定、强耦合、非线性等)与工业过程的非线性系统具有很强的相似性。倒立摆作为一个自然非线性不稳定系统,需要通过人为的控制,让其达到稳定状态,通过对该装置的系统的稳定性研究,能够揭示系统控制过程中的各种问题,如系统不确定性、传感器灵敏度、控制算法的可靠性等。对倒立摆的研究有很多,有对摆起控制方法的研究,有对倒立摆行程方面的研究,还有研究倒立摆仿真和控制器鲁棒性方面。而对于倒立摆的研究起源20世纪50年代,麻省理工学院专家成功地设计了一级倒立摆实验设备,该设备是参考火箭发射助推器原理设计出的[2]。进入60年代,倒立摆被人们以非线性的控制实例正式地推到研究人员的面前,其中以Schaefer和Cannon为代表的成功将Bang-Bang控制理论和倒立摆结构结合,实现了曲轴在倒立摆装置的稳定[3]。60年代后期和70年代初,倒立摆作为一个不稳定、严重非线性系统,专家学者提出了多种控制算法,并用其检验控制方法对不稳定、非线性和快速性系统的处理能力,受到世界各国科学家的重视[4-6]。
CASTILLO T B和SOOYONG J针对传统倒立摆行程问题设计了环形倒立摆结构,能够有效的克服行程限制,实现3个自由度的多方向运动[6-7]。文献 [8]在能量的甩控基础上对单摆甩起时间进行了最优化的求解,给出了最短时间的计算模型;文献 [9]改进了基于滑块的鲁棒控制的滑模趋近律,减小了系统输出的振动性,缩短了趋近运动时间;文献 [10]研究了控制系统的鲁棒性和抖振之间的关系,表明二者关系成反比关系,有一定的矛盾性。本文针对控制系统的鲁棒性和抖振状况,以旋转倒立摆装置 (行程无限制)为研究对象,建立理论模型,并设计Linear Quadratic Regulator(LQR,线性二次型调节器)控制器,测试选着合适的Q、R参数,通过计算机仿真研究倒立摆控制系统的控制效果即鲁棒性以及抖振状况,从实时图中可以看出二级倒立摆装置在跟踪输入方波时,有一定的抖振现象,在出现人工干扰状况下,系统能够及时反应达到平衡状态,表现出较强的鲁棒性,并对抖振现象有一定的削弱作用。说明文中设计的控制方法对二级倒立摆的控制是十分优越的一种控制方法。
1 二级旋转倒立摆理论模型
1.1 二级旋转倒立摆物理模型
文中研究的旋转倒立摆装置,相比于研究较多的直线倒立摆装置具有行程无限制的特点。其主要结构如图1所示,主要有自由摆杆和驱动臂组成。驱动臂围点O做旋转运动,因为在驱动臂运动过程中,增加了离心力,表现为具有3个自由度,旋转运动过程给控制带了更大的难度。进入对控制算法提出了更高的要求。自由摆杆分为上摆杆和下摆杆,在驱动臂运动过程中,分别绕中心点O1和O2做自由运动,保持倒立状态。

图1 二级倒立摆物理模型
对图1中的二级倒立摆物理模型参数进行设定,设驱动臂的长度为L0,旋转转动惯量为J0,τ为驱动臂上的控制力矩,C0为驱动臂的摩擦力矩系数,θ0、·θ为驱动臂的转角和角速度;下摆杆的质量为m,01杆长为L1,摆杆质心到转轴O1的距离为l1,设C1为下摆杆的摩擦力矩系数,θ、·θ为下摆杆的转角和角11速度;m2、L2、l2分别表示为上摆杆的质量、杆长和摆杆质心到转轴O2的距离,设C2为上摆杆的摩擦力矩系数。针对以上物理模型设定的相关参数变量,建立旋转二级倒立摆理论模型。
1.2 理论模型的建立
在忽略各种空气流动干扰因素下,根据1.1中设定的物理模型参数,以驱动臂所处位置为势能的零位置,进行理论推导,分别对驱动臂、下摆杆和上摆杆进行动能、势能和耗散能的求解。
(1)驱动臂的势能、动能和耗散能

式中:T0、V0、D0分别代表是驱动臂的动能、势能和耗散能。
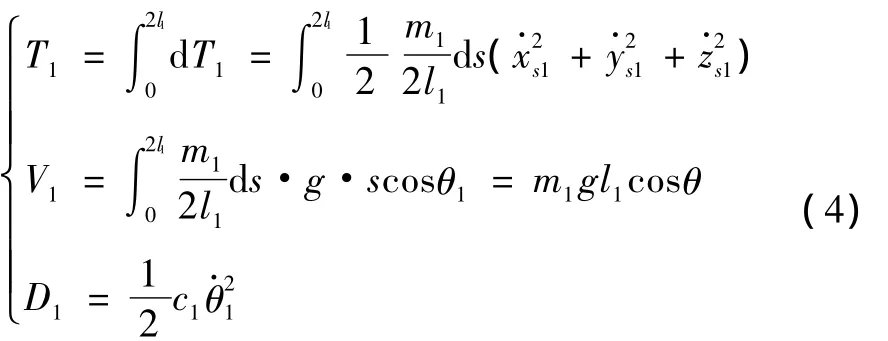
(2)下摆杆的势能、动能和耗散能
对下摆杆动能、势能、耗散能的求解过程,需要将通过坐标之间的转换矩阵,进行不同坐标系的质量的坐标转化。通过一次转动和一个平动完成坐标系Oxyz→O1x1y1z1的转换,其转换矩阵为:

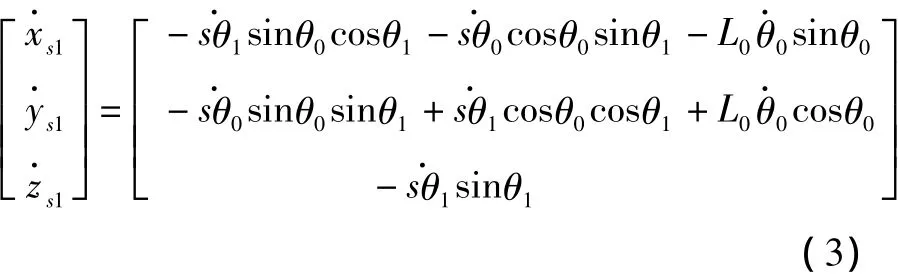
根据公式 (2),实现下摆杆坐标到旋转杆坐标之间的转换,得到下摆杆质点的速度:
(3)上摆杆的势能、动能和耗散能
根据下摆杆能量求解过程方法,对上摆杆坐标系到下摆杆坐标以及再到旋转臂坐标系进行齐次矩阵变换,视Oxyz→O1x1y1z1→O2x2y2z2为坐标系的在OTO1基础上的一个平动,表达式如下:

将上摆杆上的一点坐标 (xs2,ys2,zs2,1)转化到驱动臂坐标中的表达式为:

对公式 (6)右边的转换坐标进行求导,得到上摆杆上该质点的速度,根据上摆杆对质心的转动惯量J2和势能、动能以及耗散求解公式,求得上摆杆的动能、势能和耗散能分别为:

(4)系统总势能、动能和耗散能
系统的总动能、势能和耗散能包括对驱动臂、下摆杆、驱动臂的能量总和,如下所示:

(5)拉格朗日法建立微分方程
根据拉格朗日函数和拉格朗日方程建立系统的微分方程:
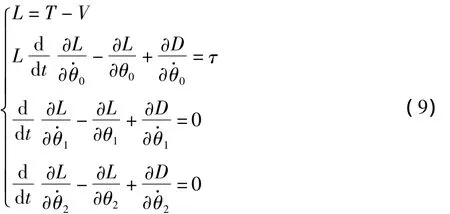
求解微分方程,得到旋转二级倒立摆系统的数学模型:

其中:F = [τ、0、0]T,Θ = [θ0、θ1、θ2]T,G =[0、 -(m1gl1+ m2gL1)sinθ1、 -m2gl2sinθ2],M 和 C是3×3的系数矩阵,求解系数表达式如下:
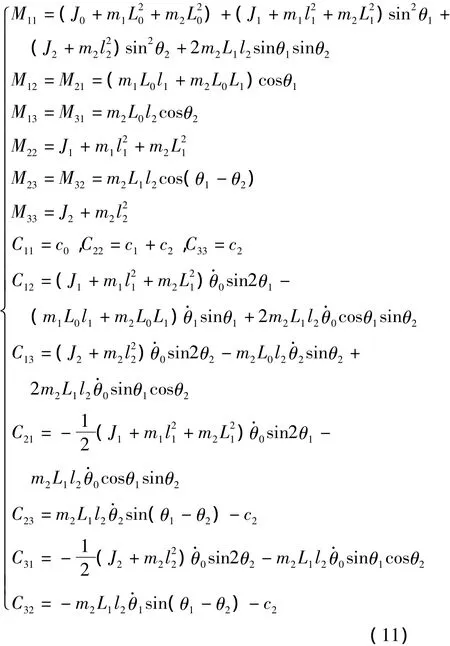
至此二级倒立摆系统的数学模型和参数定义已经完成。
2 理论参数的确定
对二级倒立摆系统的数学模型中设计的结构参数进行取值,如表1所示。
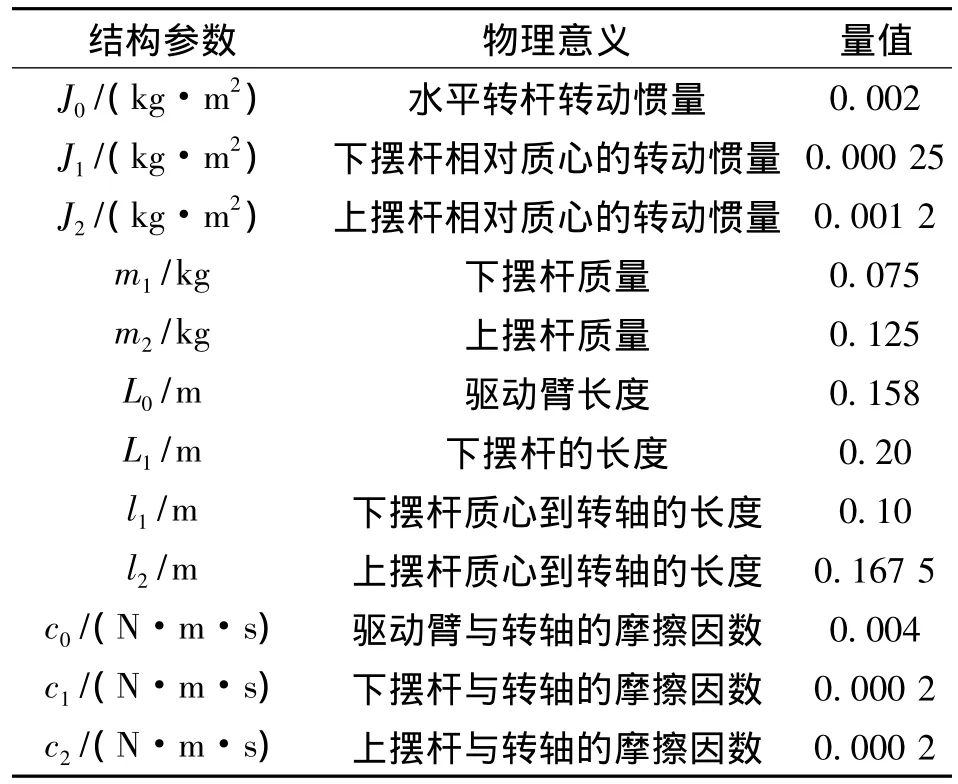
表1 旋转二级倒立摆模型结构参数
倒立摆在平衡位置时θ1和θ2都接近于零度,可利用近似关系sinθ=0,cosθ=1,并忽略高次项,对非线性模型在不稳定平衡位置进行线性化。
如果取 u = Vm,取状态变量为 X =[θ0、θ1、θ2、目的是为了补偿当控制器作用时,由于不可避免的系统测量偏差所引起的稳态误差。将已知参数代入后可得状态方程为:

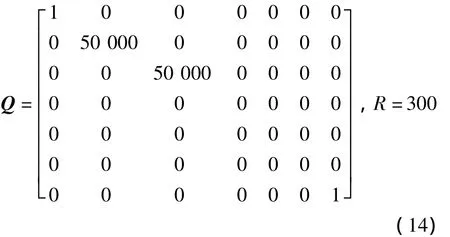
基于LQR最优控制对二级倒立摆系统的进行控制系统的设计,因此选定Q和R的参数分别为:
3 二级倒立摆LQR控制器设计与仿真实现
针对以上建立的旋转二级倒立摆数学模型,设计线性二次型调节器 (LQR),其特点系统的状态方程是线性的,性能指标函数表现为二次性函数,具有较明确的物理概念,能够处理各种扰动信号适用于时变系统。为使得二次性能指标函数达到最小,选着合适的参数输入使得系统具有较好的鲁棒性与稳定性。考虑系统被控对象的状态空间方程公式 (12)。其中,A为n×n维常数矩阵,X为n维状态向量,B为n×r维常数矩阵,u为r维控制向量,且不受约束。
对状态反馈控制律进行选着:

通过反馈控制方程 (15),基于控制系的性能指标最下化,求得最优控制矩阵K。进一步通过构造汉密尔顿 (Hamilton)函数并对其求导数和化简可得黎卡提 (Riccati)方程:

求解黎卡提 (Ricatti)方程可得状态控制律为:

求得最优控制矩阵K的表达式为:

可见,对线性二次型指标数学处理能够实现对反线性反馈规律进行线性表达,实现了系统状态的闭环控制和线性反馈闭,是系统的设计分析的一种有效方法。
在控制效果方面,LQR控制器能够对控制指标进行约束,从而能够控制指标变化的幅度,且可通过系统设计过程中的自然特性,考虑对控制量变化和跟踪误差来选择合适的LQR的加权矩阵Q和R的参数,从而求得最小的状态反馈增益矩阵K,表现出较强的鲁棒性。

完成了控制器的设计,就可以建立系统离线仿真,并参照第2部分相应参数Q和R的选取,进行控制系统的实时仿真。
4 二级倒立摆的实时仿真结果
根据第3部分选定的最佳状态反馈增益K,将K代入反馈控制器U=-KX中,实现实时仿真系统的仿真,获取各个状态变量的实时变化曲线。在仿真系统输入过程中,加入了一个幅值为1,频率为0.1的方波信号作为扰动,同时人为持续对倒立摆稳态状态进行干扰,从而观测控制效果如图2—6所示。
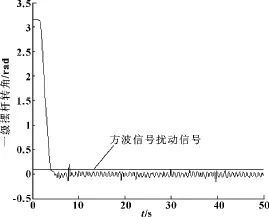
图2 一级摆杆转角

图3 二级摆杆转角

图4 一级摆杆角速度

图5 二级摆杆角速度
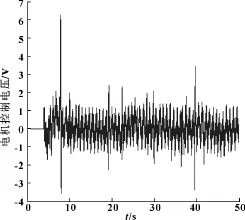
图6 电机控制电压变化曲线
图2 和图3分别一级摆杆和二级摆杆的角度的实时变化曲线。图2中,一级摆杆角度θ1的初始状态为3.3 rad,在5 s内,角度基本回归到0位,系统很快的到达平衡位置,由于系统输入0.1的方波信号作为扰动,故在平衡位置角度0.1 rad的范围内表现出一定的抖振,但是还是比较稳定,说明文中针对旋转二级倒立摆装置设置的控制器和选用的参数具有较好的控制效果,反应了控制系统的控制性能的快速性和稳定性。在图3中,二级摆杆的角度的变化大体跟随输入信号的方波变动而变化,整体表现出较好的稳定性,在3、8、20和40 s等个别时间点,表现出较大的波动,原因在于人为的对倒立摆稳定状态的干扰。在干扰效果上来看,人为干扰给系统的稳定控制带来了不稳定因素,但是摆角能够很快的回复到平衡位置,最大超调量不超过0.4 rad,最大恢复不超过2 s,表现出较快的反应速度,说明设计的控制系统能够对系统抖振有一定的削弱,具有较高的灵敏性。
设计系统的灵敏性还可从图4和图5中可以看出。图4和图5分别为一级摆杆和二级摆杆角速度变化曲线,对应与图2和图3可以看出,人工干扰情况下,角度超调量突然变大以及回归平衡位置,这个过程能够从角速度的突变曲线间接反应出系统的控制的实时性和灵敏度,表现出较好的抗干扰性和鲁棒性。
图6为电机控制电压变化曲线,控制曲线的电压幅值一般稳定在±2 V,只有在系统受到外部干扰状况下,电机电压输出曲线表现出较大的幅值变动,整个过程表现出良好的稳定性。
从图2—6,观察各个状态变量的实时变化曲线,总的来说,除了作为扰动信号的方波信号以外,人为的干扰给系统的的稳定性带来很大的波动。但文中设计的LQR控制器对二级倒立摆系统进行了有效的控制,能够很快对二级倒立摆进行精确的控制,使二级倒立摆在跟踪输入方波扰动时,能够迅速达到平衡状态并削弱抖振现象,控制摆角的精确度在10-3数量级,表现出较好的控制效果。
5 结论
从离线仿真及实时控制效果来看,此系统的控制指标是令人满意的,观察各个状态变量的实时变化曲线,可以得出,系统控制器的性能是很好的,对二级倒立摆进行了精确的控制。二级摆相对于一级摆自由度多了一个,非线性、抖振性和耦合特性等更加严重,给控制器提出了更高的要求。所设计的LQR控制器,通过反复测试选择合适的Q,R,选择最佳的参数对二级倒立摆系统进行了有效的控制,使二级倒立摆在跟踪输入方波扰动时,能够迅速达到平衡状态,削弱抖振现象,同时控制摆角的精确度在10-3数量级,证明文中设计的基于LQR方法对二级倒立摆的控制是十分优越的一种控制方法。
[1]陈刚,朱石沙,王启新,等.电液控制技术的发展与应用[J].机床与液压,2006(4):1-4.
[2]YANG JH,SHIM SY,SEO JH,et al.Swing-up Control for an Inverted Pendulum With Restricted Cart rail Length[J].International Journal of Control,Automation,and Systems,2009,7(4):674-680.
[3]彭恒,刘白雁,李秋敏,等.基于摹矩阵的倒立摆摆起的最优控制[J].控制工程,2008(S1):151-154.
[4]孙灵芳,孔辉,刘长国,等.倒立摆系统及研究现状[J].机床与液压,2008,36(7):305-310.
[5]冯帅,马州,周珂,等.虚拟线性倒立摆模型在行走机器人双腿支撑相中的应用[J].清华大学学报:自然科学版,2011(7):960-964.
[6]CASTILLO T B,OBREGÓN P G,ESPINOSA G O.Structurally Stable Regulation for a Class of Nonlinear Systems:Application to a Rotary Inverted Pendulum[J].Journal of Dynamic Systems,Measurement& Control,2006,128(4):18-19.
[7]SOOYONG J,WEN JT.Nonlinear Model Predictive Control for the Swing-up of a Rotary Inverted Pendulum[J].Journal of Dynamic Systems,Measurement& Control,2004,126(3):666-674.
[8]王铁军,张明廉.单摆甩起时间优化轨迹的计算方法[J].系统仿真学报,2004,16(5):1034-1037.
[9]姚中华,孙跃,唐春森,等.连续时间系统滑模趋近律的改进[J].重庆大学学报,2013,36(4):51-55.
[10]YAO Z H,SUN Y,TANG C S,et al.An Improve Sliding Mode Reaching Law for Continuous-time System[J].Journal of Chongqing University,2013,36(4):51-55.
[11]RONG X,OZGUNER U.Sliding Mode Control of a Class of Under Actuated Systems [J].Automatica,2008,44:233-241.