利用无人机标定雷达精度的新方法*
2015-09-28刘冬利庞海滨
刘冬利,张 驿,庞海滨,杨 辉
(1.大连海事大学 信息工程学院,辽宁 大连116026;2.海军大连舰艇学院信息作战系,辽宁 大连116018;3.海军驻中国西南电子技术研究所军事代表室,成都610036;4.海军大连舰艇学院研究生管理大队,辽宁 大连116018)
1 引言
三坐标雷达在提供目标方位、距离的同时,还通过测量目标仰角提供高度值,是非常重要的对空预警探测装备[1]。为保持三坐标雷达良好的工作状态,需定期对其测量精度进行标定。文献[2-5]分别介绍了以标校塔、高空气球、移动高架有源应答源、军用飞机或民航ADS-B系统作为雷达精度标定源的标定方法。这些方法各有不足之处:标校塔和高空气球的位置固定,资源稀少,进行标定需要雷达转场,组织实施不方便;移动高架有源应答源高度有限,雷达可测量的仰角范围小;军用飞机申请程序复杂,标定周期长,实施成本高;民航ADS-B系统提供的仰角真值与雷达测量值时间对准困难,标定精度差。另外,这些方法普遍依赖GPS获取真值,战时无法保证工作可靠性。现有三坐标雷达标定系统的标定源和真值获取设备存在的上述问题影响了它们的推广和应用,无法满足日益增长的雷达装备保障需求。因此,本文通过优化标定源设计,重新选择真值获取设备,提出了一种利用旋翼无人机标定三坐标雷达精度的新方法。
2 总体方案
2.1 系统设计
标定系统主要由标定源、真值获取系统、雷达数据录取及解算设备三部分组成。下面分别对这三部分进行设计。
为使标定源具有良好的机动性和可探测性,标定源设计采用旋翼无人机搭载龙伯球角反射体。采用旋翼无人机具有以下优点:连续飞行时间长,可保证标定期间采集足够的真值数据;飞行距离远,飞行高度可达1000 m,可标定的距离和仰角范围大;通过飞控设备操纵,既可随时改变飞行姿态,又能够实现悬停,便于飞行航路规划,不需要调整舰艇姿态即可标定舰载三坐标雷达的所有阵面。无人机本身雷达反射截面积较小,通过加载龙伯球角反射体能够显著提高雷达回波强度,使其雷达散射截面积在2 m2以上。
为保证真值数据的精度和可靠性,真值获取系统采用3台可实时获取位置数据并进行存储的卫星定位接收机组成的局域差分定位系统[6]。卫星定位系统采用由我国自主发展、独立运行的“北斗”定位系统,能够确保真值获取系统良好的可靠性和安全性。差分系统采用事后差分处理方式:标定时,以一台“北斗”终端作为差分定位系统的基准站放置在岸上开阔地带,另外两台作为移动站分别安置在旋翼无人机和舰艇等效中心处,3台“北斗”终端同时记录数据。标定结束后,将基准站和移动站记录数据导出,汇总解算出标定源的精确位置。值得注意的是,基准站与移动站的距离在有效范围内应尽可能拉大,以提高差分定位精度。
为提高标定系统的简洁性和可操作性,将雷达测量数据录取与预处理、真值处理、雷达测量误差解算等功能全部整合到雷达数据录取及解算设备中,上述功能及人机交互界面通过运行采用VC语言编写的“雷达标定系统软件”实现。雷达数据录取及解算设备通过串口等网络通信端口与雷达和真值设备建立连接,进行数据交换。它在无人机飞行过程中通过网络通信端口自动接入舰艇作战系统实时截取雷达测量值,在无人机飞行结束后由3台“北斗”终端导入真值数据。对获取的测量值和真值进行必要的处理后,根据数理统计相关理论最终解算出雷达系统误差。
综上所述,本文提出的三坐标雷达标定系统组成结构如图1所示。
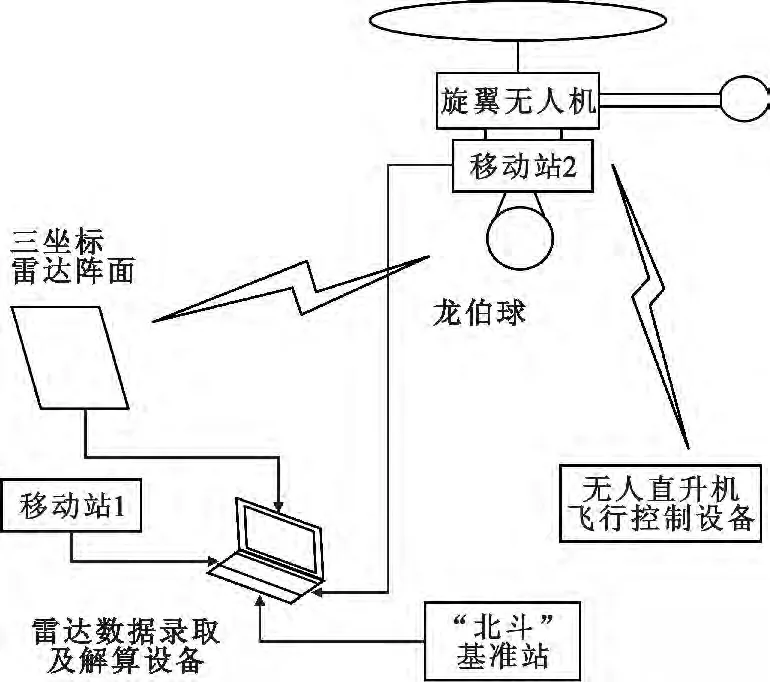
图1 标定系统组成结构Fig.1 The calibration system structure
根据以上的系统结构功能分析,图2给出了整个标定工作流程。

图2 标定工作流程Fig.2 The calibration work process
2.2 真值获取系统精度需求分析
雷达精度标定要求真值精度至少是雷达测量精度的3倍以上。由于卫星定位系统的差分定位数据精度优于1 m,因此由其获取的距离真值能够满足标定要求。下面对仰角真值精度需求进行分析。
仰角真值数据的误差Δα主要受真值设备的高度测量误差Δh和标定源与雷达的距离R影响,它们之间的关系可以用下式表示:
假设高度测量误差Δh分别为1 m、5 m、10 m,对目标距离R和仰角测量精度Δα之间的关系进行仿真分析,结果见图3。

图3 不同高度测量误差下仰角真值误差与标定源距离的关系Fig.3 The relationship between elevation true value error and distance of calibration resource with different height measurement error
可以看出,为使Δα小于特定值,当Δh增大,R的最小值也必须增大。为便于标定的组织实施,应利用差分技术使Δh最小,降低标定对R最小值的要求。另外,雷达标定还要求R的最小值需同时大于雷达远场条件和雷达距离探测盲区。由于三坐标雷达的远场条件一般小于其距离探测盲区,因此,舰载三坐标雷达与标定源距离R的最小值为其距离探测盲区。如图3所示,当 Δh为1 m时,R大于1.2 km,则 Δα 小于0.05°。R 为1.2 km时标定源在三坐标雷达的距离探测盲区之外,而且Δα为0.05°时高于雷达仰角测量精度数倍,此时仰角真值数据的精度可以满足标定要求。由于卫星定位系统的差分定位精度Δh小于1 m,因此利用其获取目标仰角真值精度能够满足三坐标雷达仰角标定的要求。同理,也可证明利用卫星定位系统获取的方位真值数据精度能够满足三坐标雷达方位标定的要求。
3 关键技术
3.1 标定源的航路规划及一体化设计
标定源的航路规划就是对标定源的航迹及飞行时间进行规划,主要考虑以下三个方面因素:一是为确保在标定时获取足够的雷达测量数据有效点数;二是要满足三坐标雷达标定对于标定源仰角和距离的要求;三是便于标定活动的组织实施,保证飞行安全。为此,一般选择无人直升机飞行高度在300~500 m(不需要航空管制申请),飞行速度为50 km/h(保持飞行的稳定性),连续有效飞行10 min左右(获取足够的雷达测量数据有效点数)。标定源的一体化设计就是采用合理的龙伯球角反射器加载方式,使其与无人直升机的散射中心重合。那么对被标雷达而言,无人直升机仍然是“点目标”,易被标定雷达可靠发现和稳定跟踪。
3.2 真值数据处理技术
真值数据处理分为差分定位、坐标转换和插值处理三个步骤。差分技术分为伪距差分和载波相位差分两种[7]。大地测量和工程测量上常采用载波相位差分技术,就是把基准站采集的载波相位实时发给用户接收机,通过求差解算位置坐标。载波相位差分的定位精度可达厘米级,经过坐标转换后能够获取较高的目标仰角、方位角和距离真值精度。差分后的目标真值数据所在坐标系为大地坐标系,而雷达测量值为站心极坐标系。为解算雷达测量系统误差,需统一真值数据与雷达测量数据的坐标系,先将真值数据由大地坐标系转换到空间直角坐标系,再转换到站心极坐标系。“北斗”真值设备的数据采集频率可达5 Hz,通过插值处理,能够进一步增加单位时间内的真值数据密度,减小真值数据与雷达测量数据的时间对准误差,使其能够最优逼近雷达测量值时刻真值。
3.3 雷达测量数据提取
对雷达测量数据的录取主要有三种方式:一是通过数据录取终端接入水面舰艇作战系统,然后截获作战系统网络上雷达发送的目标探测数据报文;二是从带目标探测数据存储功能的雷达显控终端上下载目标航迹数据;三是通过和雷达输出接口匹配的数据录取设备获得目标点迹数据。为保证录取设备的通用性,上述三种方式均应考虑。在标定过程中,雷达数据录取设备与三坐标雷达对接,接收雷达送出的目标数据,记录在移动存储介质上。雷达标定系统的测量值与真值必须采用统一的时间基准,本系统以“北斗”时间作为时间基准。为保证雷达测量数据的有效点数,标定时还需合理设置雷达扫描速率和数据率。
3.4 雷达测量数据预处理
在雷达标定过程中,受海况、舰船摇荡、转动惯性等因素的影响,雷达测量数据存在一定的噪声和异常的跳变点,即通常所称的“野值”。为避免“野值”对雷达标定精度造成的不利影响,应当通过雷达测量数据的预处理将“野值”予以剔除[2]。为保证标定过程的有效性及标定精度,根据雷达测量信号的特点,测量数据预处理采取如下方法和步骤:先利用“小波阈值法”消除噪声数据,再利用“外推拟合法”有效剔除野值。其中,野值剔除采用了“3σ”准则,即从一次差中查出大于3倍标准误差的误差点。这里说的3倍标准差的标准有两种做法,一种是用雷达指标的标准误差做标准,另一种是以雷达实测值的标准误差作为标准。为更好地贴近雷达实际状况,应采用后一种做法。
4 试验测试
4.1 试验条件简介
根据该方案制成的样机已对停靠在码头上的舰艇进行了某型雷达精度标定试验。在航路上设置4个航路点构成近似平行四边形形状,使无人直升机沿着“1”→“2”→“3”→“4”4个航路点定高(300 m)飞行。无人直升机飞行过程中距离舰艇最远4.8 km左右,整个飞行时间30 min。无人直升机的飞行航路如图4所示。

图4 无人直升机飞行航路Fig.4 The flying route of unmanned gyroplane
4.2 试验结果与分析
试验完毕后,“雷达标定系统软件”先对提取出的雷达测量数据进行消除噪声和剔除野值处理,得到有效的测量值,并依次对由“北斗”真值设备获取的原始数据进行差分、坐标转换和插值处理,得到目标真值。本次试验对雷达的仰角、方位角和距离测量误差进行了标定,这里只对仰角标定的试验结果进行介绍。
图5显示了雷达测量数据经过噪声消除后产生的变化。消除噪声后,再根据“3σ”准则对测量数据中的野值进行剔除。图6为野值剔除后剩余的测量数据与真值数据的对比。

图5 噪声消除前后的目标仰角测量值对比Fig.5 The comparison of target elevation observed value before and after noise elimination

图6 剔除野值后目标仰角测量值与真值对比Fig.6 The comparison of target elevation observed value and true value after outliers eliminating
为保证雷达试验结果的准确、可靠,必须获取足够的测量点数。雷达试验的最小测量点数与测量值估计精度和试验对象设备的精度有关[8]。根据本次试验对象的技术性能参数,计算得出标定所需最小测量点数为25。这里选取目标仰角变化较大的30个连续测量数据,经过野值剔除后剩余28个测量数据,能够满足雷达标定对于测量点数的要求。
在完成对目标仰角测量值和真值的一系列预处理过程后,通过解算得出了三坐标雷达仰角测量的系统误差,证明了该系统的可用性。三坐标雷达的维修保障人员可以根据标定结果对雷达仰角测量的系统误差进行校正。
5 结束语
本文针对三坐标雷达在实际使用中及维修后缺乏精度标定设备,对三坐标雷达精度标定方法及工程实现进行了研究,提出了采用搭载龙伯球和“北斗”定位系统的旋翼无人机作为标定源,以差分定位为真值获取手段的雷达标定新方法。该方法获取的真值精度高,标定结果准确可靠,能够如实反映雷达系统误差大小。与传统雷达标定方法相比,该方法使用成本低,组织工作简洁,实施条件宽松,能够实现对三坐标雷达全高度、全方位的标定,而且可以通过对旋翼无人机的飞行控制实现静态和动态两种标定方式,具有较高的军事和经济效益。
[1]丁鹭飞,耿富录.雷达原理[M].西安:西安电子科技大学出版社,2003.DING Lufei,GENG Fulu.Principle of radar[M].Xi’an:Xidian University Press,2003.(in Chinese)
[2]陈相麟,蒋谱成,蒋寿庭.雷达试验[M].北京:国防工业出版社,2004.CHEN Xianglin,JIANG Pucheng,JIANG Shouting.Radar tests[M].Beijing:National Defence Industry Press,2004.(in Chinese)
[3]姚景顺,杨世兴.舰载雷达的动态标校[J].火力与指挥控制,2008,33(3):128 -130,134.YAO Jingshun,YANG Shixing.Dynamic Precision Adjusting Shipboard Radar[J].Fire Control and Com man d Control,2008,33(3):128 -130,134.(in Chinese)
[4]徐永明,冯兵.舰载雷达标定方法探讨[J].中国雷达,2006(3):1- 5.XU Yongming,FENG Bing.Discussion for calibration measurements of the Ship - born radar[J].China Radar,2006(3):1 -5.(in Chinese)
[5]苑文亮,唐小明,朱洪伟,等.基于ADS-B数据的雷达标校新方法[J].舰船电子工程,2010,30(3):147 -150.YUAN Wenliang,TANG Xiaoming,ZHU Hongwei,et al.A new method for radar calibration based on ADS-B data[J].Ship Electronic Engineering,2010,30(3):147 -150.(in Chinese)
[6]徐绍锉,张华海,杨志强,等.GPS测量原理及应用[M].武汉:武汉大学出版社,2001:79-89.XU Shaocuo,ZHANG Huahai,YANG Zhiqiang,et al.Principle and application of GPS measurement[M].Wuhan:Wuhan University Press,2001:79 -89.(in Chinese)
[7]沙定国.实用误差理论与数据处理[M].北京:北京理工大学出版社,1993:67-70.SHA Dingguo.Practical theory of errors and data processing[M].Beijing:Beijing Institute of Technology Press,1993:67 -70.(in Chinese)
