高动态临近空间飞行器海上组网测控方案设计*
2015-09-28李宇波杨维维朱利伟
李宇波,周 纯,杨维维,朱利伟
(中国卫星海上测控部,江苏 江阴214431)
1 引言
临近空间通常是指地球表面以上20~100 km高度之间的空域,该空域高于普通航空飞行器的最大高度而又低于轨道飞行器的最低高度[1],兼具航空航天的空间特点。临近空间飞行器按飞行速度可分为低动态临近空间飞行器和高动态临近空间飞行器两大类,前者包括高空气球、飞艇、高空/超高空长航时无人机等,主要用于对地观测、通信中继等;后者包括高超音速飞行器、亚轨道飞行器、火箭/组合巡航型飞行器等,主要用作远程快速机动平台。
为验证高动态临近空间飞行器性能,一般需进行飞行验证试验,要求测控系统提供测控支持,获取飞行试验数据,对飞行器进行必要控制。与航天测控任务相比,高动态临近空间飞行器测控特点主要归纳为四个方面,即全程测控、多目标测控、高动态测控和长时间“黑障区”测控。
高动态临近空间飞行器飞行试验一般可采用陆基多站接力测控、中继卫星天基测控、陆海空一体化测控等模式。陆基多站接力测控模式优点是陆上站众多,且可使用车载站沿航区灵活布置,较好满足高动态临近空间飞行器测控需求;存在不足在于该模式仅适用于陆上飞行试验,不能满足海上飞行试验尤其是远程飞行试验测控要求。天基测控模式具有覆盖范围广、数据传输速率高、调度灵活等优点,同时还可以有效降低使用成本,但是,也存在测控手段单一、“黑障区”测控存在跟踪丢失风险[2]、目标机动段存在跟踪丢失风险[3]以及对终端设备要求高等不足。陆海空一体化测控模式可以满足高动态临近空间飞行器海上飞行试验的需求,但是需要有海岛站、远洋靶场、远程测量飞机等提供支持,目前这些条件受限。
我国高动态临近空间飞行器飞行试验主要采用陆基多站接力测控模式。随着技术发展,后续将开展高动态临近空间飞行器海上飞行试验,现有测控模式将不能适应,亟需开展新的测控模式研究。目前,国内相关研究侧重于测控需求与技术特征分析,对高动态临近空间飞行器海上测控系统建设尚无公开论述。本文综合考虑测控需求及测量船、临近空间飞艇各自优势,提出一种海上组网测控新模式,并进行具体方案设计。
2 海上组网测控模式设想
由于高动态临近空间飞行器飞行高度低,当进入海上段飞行时,若仅依靠测量船进行测控,则需要的测量船数量较多(例如参加远程飞行试验时进行全程测控约需要11艘测量船),使用成本较高。为既实现全程测控,又减少测量船数量,可借鉴国外将临近空间飞艇作为信息获取与数据中继平台的思路,将测量船与临近空间飞艇结合起来进行高动态临近空间飞行器测控。
2.1 临近空间飞艇在信息获取与数据中继方面应用情况
临近空间飞艇飞行高度一般在20~50 km,载荷能力可以达到2000 kg以上,适合于作为远距离信息获取与数据中继平台。美国洛马公司研发的高空长航时验证艇,长152 m,直径48 m,有效载荷约2000 kg,可在20 km高空飞行一个月以上,对直径1200 km圆形区域进行监视并实时将监视数据传至地面。
美国海军也在开展高空机载中继与路由器飞行器(High Altitude Airborne Relay and Router,HAARR)项目研究[4],用于不同单元之间的通信。HAARR可以从舰船上出发,依靠电机和飞艇后部两个螺旋桨进行机动,留空时间30天,留空高度21 km。HAARR从舰船上出发一个月后返回,由另外一艘HAARR替换。
2.2 海上组网测控模式
测量船具有作业范围广、综合测控通信能力强、机动灵活等特点,临近空间飞艇具有覆盖范围大、滞空时间长、配置灵活等特点,为解决高动态临近空间飞行器海上测控对测量船数量需求较多的难题,可考虑将测量船与临近空间飞艇的优势结合起来进行海上组网测控,组成如图1所示,具体设想如下:
(1)相对跟踪目标飞行轨迹,临近空间飞艇布于前方,测量船布于后方,两者搭接对跟踪目标进行测控,并在两者对目标同时可见的弧段内形成备份。1艘测量船、1艘飞艇形成一个海上测控组合,根据跟踪目标飞行距离不同,可灵活配置相应数量的测控组合;
(2)鉴于临近空间飞艇尺寸不宜过大,载荷能力有限,可考虑先搭载遥测、光学测量设备,在有余量情况下再加装遥控、外测设备;
(3)测量船与临近空间飞艇可见,由测量船为飞艇提供下行通信路由支持[5],与采用卫星通信相比,可有效降低飞艇搭载通信设备的尺寸与重量;
(4)可采用测量船安装相控阵天线、飞艇安装小口径抛物面天线(利于增大天线波束)的方式进行多目标测控,必要时还可以采取测量船、飞艇分别跟踪不同目标的方式进行测控;
(5)当目标处于“黑障区”时,可采用测量船脉冲雷达(采用反射式跟踪方式)、光学设备及飞艇光学设备进行测量;
(6)由测量船作为飞艇的释放及回收平台。任务前,测量船根据要求将飞艇在相应海域释放,并进行测量船与飞艇间跟踪与通信联试;任务后,测量船再驶回飞艇所在海域,进行飞艇回收。
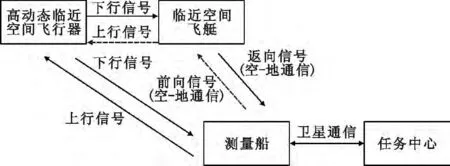
图1 海上组网测控模式示意图Fig.1 Maritime networking TT&C mode diagram
2.3 海上组网测控模式的优势
与陆基多站接力测控模式相比,海上组网测控模式可满足海上飞行试验尤其是远程飞行试验的测控要求。与天基测控模式相比,海上组网测控模式的优势主要有:
(1)信号传输路径损失小。中继卫星与跟踪目标间距离在36 000 km甚至以上,飞艇与跟踪目标间距离最大约2000 km,信号传输路径损失减小25 dB以上,可大大提高接收信号质量;
(2)对跟踪目标搭载终端设备要求低。飞艇对目标进行测控时,由于信号强度大,可直接接收其对地测控信号,不需要在目标上新安装测控终端;
(3)测控手段多样。可综合利用脉冲雷达、统一测控设备、光学设备对跟踪目标进行测量,且具备“黑障区”测量能力;
(4)目标机动段测量能力强。一般情况下,当跟踪目标采用全向测控天线时,由于测量船、飞艇接收跟踪目标信号存在较大余量,可适应目标姿态变化时信号增益变化,实现对目标连续跟踪。
3 海上组网测控方案设计
3.1 测量船对高动态临近空间飞行器跟踪范围计算分析
图2中,θ1为自测量船至跟踪目标的地心角(可用于表示测量船对目标的覆盖范围半径),E为最低跟踪仰角,re为地球半径,h为目标飞行高度,则


图2 测量船对跟踪目标覆盖范围示意图Fig.2 Cover range of TT&C ship to tracking target
目标飞行高度与测量船覆盖范围半径对应关系见图3。据图3分析,目标飞行高度越高,测量船对目标覆盖范围越大。另外,测量船最低跟踪仰角选择越小,其对目标覆盖范围也越大,但为了确保对目标进行外弹道测量和遥控,一般选择最低跟踪仰角7°对应的覆盖范围开展测控方案设计。
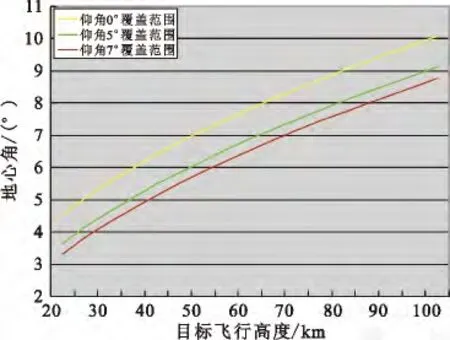
图3 目标飞行高度与测量船覆盖范围半径对应关系Fig.3 Relationship between flight altitude of target and cover radius of TT&C ship
3.2 飞艇对高动态临近空间飞行器跟踪范围计算分析
图4 中,θ2为自飞艇至跟踪目标的最大地心角(可用于表示飞艇对目标的覆盖范围半径,取飞艇至跟踪目标的测量线与地表相切),re为地球半径,h1为飞艇飞行高度,h2为目标飞行高度,则

图4 飞艇对跟踪目标覆盖范围示意图Fig.4 Cover range of airship to tracking target
当飞艇、跟踪目标取不同飞行高度时,飞艇对跟踪目标覆盖范围半径变化关系见图5。
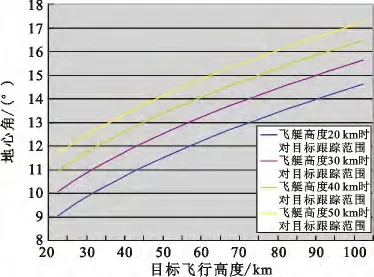
图5 目标飞行高度与飞艇覆盖范围半径对应关系Fig.5 Relationship between flight altitude of target and cover radius of airship
据图5分析,目标飞行高度越高,飞艇对目标覆盖范围越大;提升飞艇飞行高度,也可以提高对目标的覆盖范围。
3.3 海上组网测控方案设计
3.3.1 近中程高动态临近空间飞行器海上组网测控方案设计
对于飞行高度50 km以下的高动态临近空间飞行器,根据美国X-43、X-51技术验证试验情况,其飞行距离一般选择在1000~2000 km。对于此类任务,选择飞艇高度20 km、跟踪目标飞行高度20 km、目标飞行距离2000 km(对应地心角约18.0°)时,飞艇对跟踪目标覆盖范围半径约为地心角9.0°,测量船对跟踪目标、飞艇的仰角7°覆盖范围半径均为地心角3.3°,计算分析需要1艘飞艇、2艘测量船进行测控。具体部署时,可将飞艇布于飞行轨迹前段进行长弧段测量,并为测量船1跟踪提供引导;测量船1与飞艇搭接测量,并为飞艇提供通信支持;测量船2布于目标落区附近,与测量船1搭接进行末段和落点测量,两船之间通信采用卫星通信,具体见图6。

图6 测量船与飞艇部署关系示意图Fig.6 Disposition of TT&C ship and airship
3.3.2 远程高动态临近空间飞行器海上组网测控方案设计
对于飞行高度约100 km的高动态临近空间飞行器,由于要执行全球范围内远程快速打击任务,其飞行距离要求能覆盖半个地球,即地心角180°左右。对于此类任务,选择飞艇高度为20 km时,飞艇对跟踪目标的覆盖范围半径约为地心角14.6°,测量船对跟踪目标的仰角7°覆盖范围半径约为地心角8.7°,测量船对飞艇的仰角7°俯瞰范围约为地心角3.3°,计算分析共需要6艘飞艇、7艘测量船进行全程测控,具体示意见图7。其中,6艘飞艇与6艘测量船形成6个测控组合,搭接进行航区测量;测量船7布于目标落区附近,与测量船6搭接进行末段和落点测量。这种部署方式可充分利用飞艇、测量船各自的测控优势,将飞艇、测量船组合成一个海空一体化的测控网,满足此类型高动态临近空间飞行器全程飞行的测控要求。

图7 多船、多飞艇组网测控示意图Fig.7 Networking TT&C using multiple TT&C ships and airships
实际情况下,在部分弧段有陆上站(首区站、海外站)可用时,也可用陆上站代替部分测量船。
4 海上组网测控关键技术分析
4.1 动平台宽带数据传输技术
为降低飞艇通信载荷重量,选择将飞艇获取的测量数据发送至测量船由测量船代传至任务中心。通常情况下,飞艇接收到的遥测数据、数传数据、光学图像数据量较大,需要进行宽带传输,而飞艇、测量船都属于动平台,需开展海-空动平台之间的宽带数据传输技术研究。在现阶段,可以考虑利用飞机、大型无人机搭载通信载荷开展相关试验,积累技术经验。
4.2 高动态目标捕获跟踪技术
测量船、飞艇在对高动态临近空间飞行器测控时,目标在天线波束内驻留时间短,给角度捕获和跟踪带来较大困难,后续需结合测控频段选择、引导捕获策略设计等开展研究,并可通过跟踪搭载测控信标/应答机的飞机、无人机开展相关试验。
4.3 长时间“黑障区”跟踪技术
对于在临近空间长期飞行的高动态飞行器,其“黑障区”测量手段主要包括光学测量和雷达测量。目前,对于目标长时间处于“黑障区”时的目标特性变化、稳定跟踪方法等尚缺乏研究。后续可结合参加航天器陆上、海上再入飞行任务时积累试验数据,并开展相关技术验证工作。
4.4 大型飞艇的释放与回收技术
临近空间飞艇体积较大,测量船尚缺乏飞艇海上释放与回收经验,需开展必要的技术研究。同时,也可以考虑探索利用无人岛屿释放、回收大型飞艇的可行性。
5 结束语
利用测量船与临近空间飞艇开展海上组网测控具有测控手段多样、设备配置简单、通信保障方便、部署灵活机动的特点,可以满足高动态临近空间飞行器飞行试验全程测控、多目标测控、高动态测控、长时间“黑障”区测控的需求,对我国后续开展高动态临近空间飞行器海上测控系统建设是一种有益的探索。同时,这种测控模式在传统的航天测控任务中也可应用,有助于提高测控弧段覆盖率,提升测控系统完成任务的可靠性,具有广阔的应用前景。
本文主要从理论分析层面进行了高动态临近空间飞行器海上组网测控的方案设计,动平台宽带数据传输、高动态目标捕获跟踪、长时间“黑障区”跟踪、大型飞艇的释放与回收等一系列关键技术后续还有待进一步开展研究。
[1]沈海军,程凯,杨莉.近空间飞行器[M].北京:航空工业出版社,2012.SHEN Haijun,CHENG Kai,YANG Li.Near Space Aerocraft[M].Beijing:Aviation Industry Press,2012.(in Chinese)
[2]徐茂格,席文君.近空间高超音速飞行器射频通信“黑障”研究[J].电讯技术,2009,49(10):49 -52.XU Maoge,XI Wenjun.Study on Blackout in Near Space Hypersonic Vehicle Radio Frequency Communication[J].Telecommunication Engineering,2009,49(10):49 - 52.(in Chinese)
[3]柴霖,吴潜,雷厉.近空间高动态飞行器测控系统发展趋势分析[J].电讯技术,2008,48(1):13 -19.CHAI Lin,WU Qian,LEI Li.Analysis of Development Trend of the TT&C Communica tion System for Near Space High Dynamic Vehicles[J].Telecommunication Engineering,2008,48(1):13 -19.(in Chinese)
[4]曹秀云.美国临近空间飞行器技术发展概述[J].现代军事,2007(3):54-58.CAO Xiuyun.United States of America Near Space Vehicles Technology Development Overview[J].Modern Military,2007(3):54 -58.(in Chinese)
[5]刘嘉兴.近空间跟踪与数据中继系统的初步设想[J].电讯技术,2008,48(5):46 -50.LIU Jiaxing.A Tentative Idea for Nearspace Tracking and Data Relay System(TDRS)[J].Telecommunication Engineering,2008,48(5):46 -50.(in Chinese)
