桥臂交替导通型多电平换流器的晶闸管换向方法
2015-09-19胡鹏飞周月宾林志勇
郭 捷,胡鹏飞,周月宾,林志勇
(1.国网河北省电力公司电力科学研究院,河北 石家庄 050021;2.浙江大学 电气工程学院,浙江 杭州 310027)
0 引言
模块化多电平换流器MMC(Modular Multilevel Converter)作为一种新型电压源型换流器VSC(Voltage Source Converter),已经在以柔性直流输电为典型应用的中高压领域展现出明显优势。文献[1-4]较早地提出了MMC的基本原理,文献[5-6]进一步讨论了其控制策略,文献[7]扩展了它在AC/AC换流器方面的应用领域,文献[8]提出了适用于中压领域的PWM方法。MMC在基于VSC的高压直流输电系统中的实际应用包括西门子公司在美国旧金山建立的Trans Bay Cable工程[9]和中国电力科学研究院在上海建立的南汇风电场柔性直流输电示范工程[10-11]等。 MMC 具有以下优点[1-4,8-13]:与传统VSC相比,通过子模块串联提高换流器额定电压,实现难度低于前者的通过大量开关器件串联;换流器电平数可达到很多,在开关器件开关频率很低时也可实现较小的输出波形畸变;模块化设计提高了子模块冗余度,取消了正负极间的直流电容,而是把它分散在各子模块中,提高了换流器的可靠性和可维护性。但是,MMC也存在运行时换流器损耗较大、控制系统复杂、直流侧故障承受能力较低等缺点[14-16]。
在MMC的基础上,文献[15]提出的桥臂交替导通型多电平换流器A2MC(Alternate-Arm Multilevel Converter)的主要优点在于:桥臂与换流器电压同步交替导通,电压正半周由上桥臂形成,电压负半周由下桥臂形成,形成电压波形所需的子模块大为减少,降低了换流器损耗;发生直流侧短路故障时,在同相上下桥臂间并没有直接的故障电流通路,有利于故障电流的抑制[15-16]。A2MC的提出拓展了MMC的拓扑形式,特别是在经济性和可靠性要求较高的高压直流输电领域具有重要的实际意义。但在A2MC拓扑中,桥臂上的换向开关由IGBT串联而成,且在运行时需要承受直流全压,这就需要大量IGBT串联来提高换向开关的耐压,从而重新引入了传统VSC中IGBT串联困难的缺点,其进一步应用可能受到限制。
如果使用晶闸管代替IGBT作为换向开关,其优点在于:晶闸管的串联难度远小于IGBT,对均压电路的要求较低,易于实现;晶闸管的耐压高于IGBT,在同样耐压水平下,可以使用较少量的晶闸管;晶闸管成本远低于同等耐压水平和功率的IGBT。但晶闸管是一种半控型电力电子器件,如果直接使用晶闸管而不改进换流器的控制策略,则桥臂只有在交流电流落后交流电压的情况下才能成功关断,即换流器无法向系统提供无功。为了保证换流器具有有功、无功四象限运行的能力,换向时需要外部控制策略配合强制关断。
本文给出的方法使用串联晶闸管代替IGBT作为换向开关,并通过与之相适应的控制策略实现晶闸管的强制关断,从而在具有降低损耗和故障电流抑制能力等优点的前提下,降低了A2MC的成本和实现难度。
1 晶闸管换向方法的基本原理
1.1 主电路基本结构
主电路基本结构如图1所示。其主电路为三相桥式结构,共有6个桥臂,每个桥臂均由子模块组、缓冲电抗和换向开关串联组成。其中,子模块组由单相全H桥子模块串联而成,每个子模块内含2个带有反并联二极管的IGBT和1个直流电容;缓冲电抗起到对桥臂电流进行缓冲的作用;换向开关由带有反并联二极管的晶闸管串联而成。通过合理安排子模块和换向开关的导通状态,MMC就可以实现多电平的VSC功能。
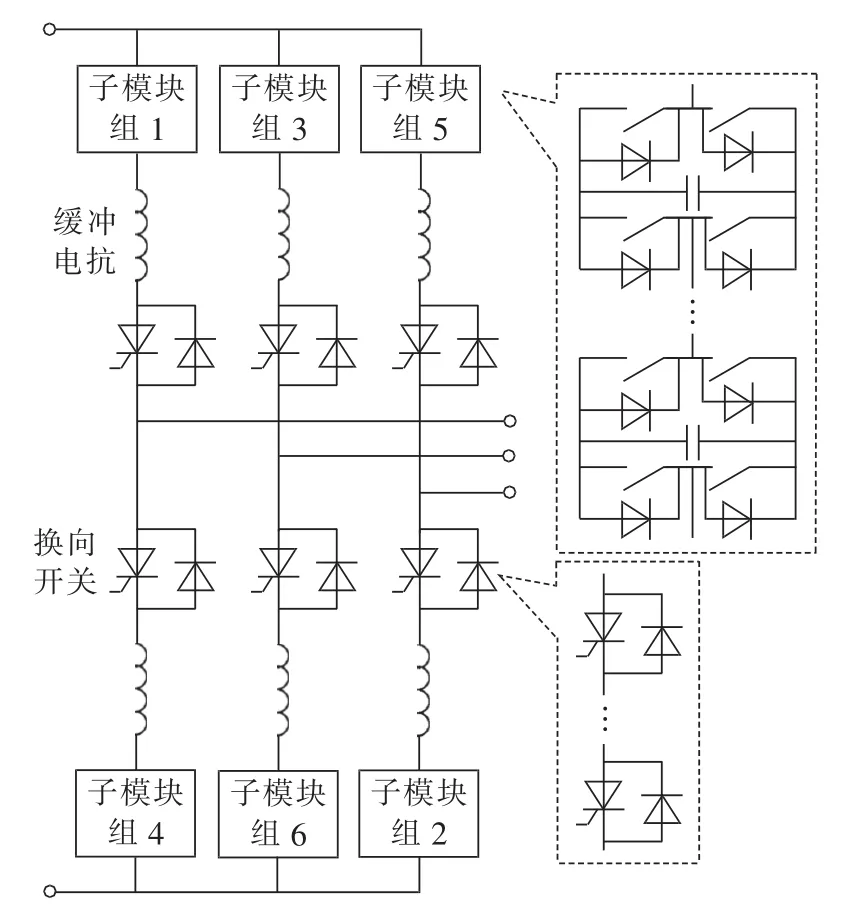
图1 晶闸管换向时主电路结构Fig.1 Main circuit for thyristor-switch strategy
1.2 基本原理
根据MMC的基本原理[1-4]可知,通过实施合理的调制控制策略,子模块组可以输出参考电压所期望的输出电压波形,并维持子模块电容间的电压平衡。具体的控制方法在第2节详细介绍。
根据桥臂交替导通[15]的原理,以A相为例,交流输出参考波0°~180°范围内,上桥臂的换向开关导通、下桥臂的换向开关关断时(如图2(a)所示),上桥臂子模块组输出电压uAP为:

其中,Udc为直流侧电压;uref_A为A相交流输出的参考电压。
交流输出参考波180°~360°范围内,上桥臂的换向开关关断、下桥臂的换向开关开通时(如图2(b)所示),下桥臂子模块组输出电压uAN为:

通过换向开关的导通状态与相应桥臂上子模块组的输出电压相配合,可以在该相交流输出端得到所需的正弦交流输出电压。
传统的A2MC,换向开关是由一组IGBT串联而成的[15],它的状态是通过驱动IGBT的栅极实现的。本文给出的方法中,换向开关由一组晶闸管串联而成。根据晶闸管的关断特性可知,晶闸管在门极触发信号消失后,需等待流过晶闸管的电流过零并在管子两端加反压后才能可靠关断。所以,对于给出的方法除了驱动晶闸管门极外,还需子模块组与之配合强制晶闸管电流过零,以实现上述的桥臂交替导通。

图2 桥臂交替导通原理Fig.2 Principle of alternate arm conducting
1.3 交直流侧电流关系及运行限制条件
A2MC为VSC,桥臂的交替过程及顺序由交流参考电压决定。理想情况下,交直流两侧的电流与交流电压之间的相位关系如图3所示;根据电流的对应关系可以把交流电压的一个周期划分为6个阶段,每阶段开通的桥臂与电流的对应关系如表1所示。
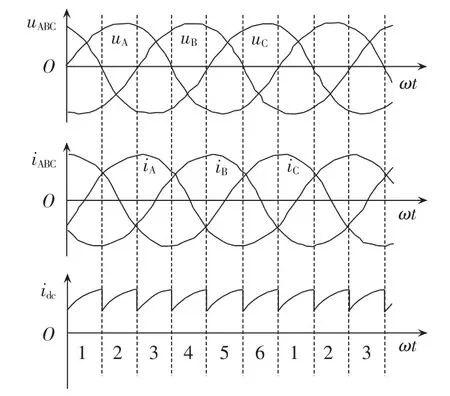
图3 交直流两侧的电流与交流电压相位关系Fig.3 Phase relationship between iABC/idcand uABC

表1 开通的桥臂与电流的对应关系Table 1 Relationship between idcand on-state arm
根据图3和表1的对应关系,可以计算出每一个阶段的平均直流电流Idc_1,它们均与1个工频周期内的平均电流Idc相等,为计算方便,以阶段2为例,有:
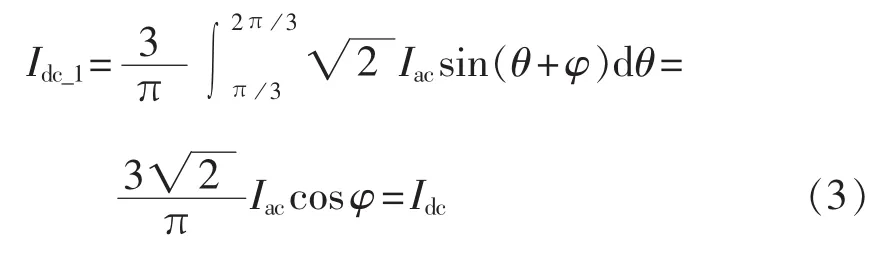
其中,Iac为交流电流有效值;cosφ为功率因数。还可以进一步求出直流侧的稳态功率:

交流侧三相稳态功率Pac可表示为:

其中,Uac为交流相电压有效值。
换流器在运行时,应满足交流侧与直流侧稳态功率相等的原则,从而保证子模块直流电容电压平均值稳定,不会出现过高或过低的失控状态。根据此原则,联立式(4)和(5)可以做如下推导:

式(6)描述了A2MC交、直流侧电压的关系,在进行系统设计时应基本满足这一关系。但是为了使额定直流电压取值方便,Udc可在较小的范围内与该理论值存在一定偏差,这一偏差会体现在稳态运行时的子模块平均电压上。由式(6)可以看出该换流器直流电压利用率高于传统VSC。
2 换流器控制策略
2.1 换向开关的控制策略
如前文所述,晶闸管串联而成的换向开关不能仅通过控制门极信号而实现自关断,需要强制关断。换向开关控制策略需要满足以下原则:尽量不添加或少添加额外辅助强制关断电路,降低换流器拓扑的复杂性;强制关断所需电流应由换流器内部提供,不应由交流侧提供,以免造成交流侧输出电流严重畸变;关断过程尽量迅速,减小对交流电压输出波形的影响。
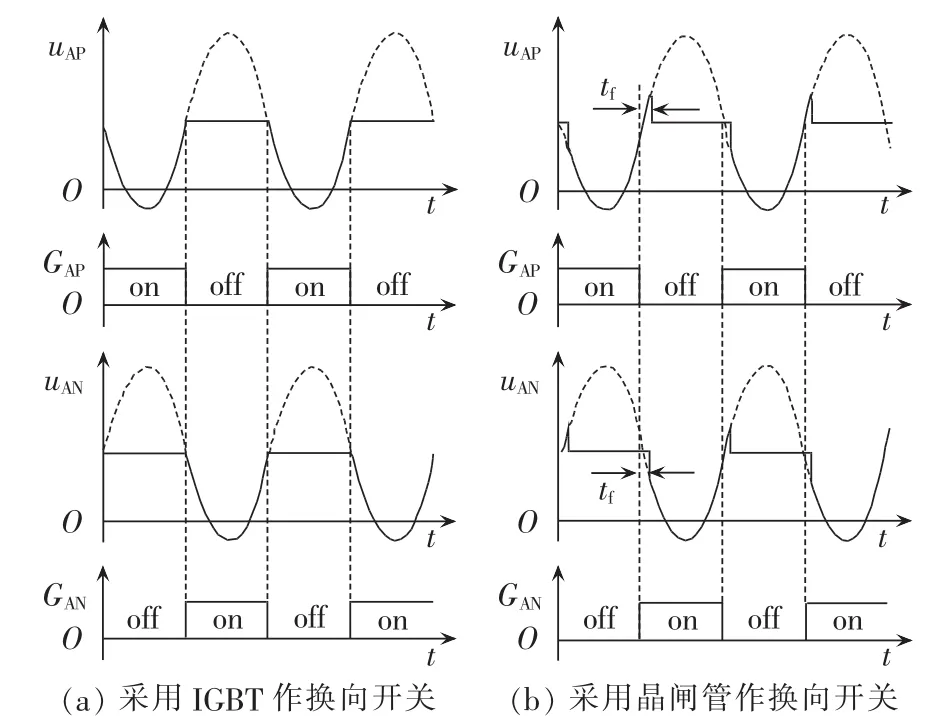
图4 上、下桥臂输出电压与门极信号配合情况Fig.4 Coorperation between output voltage and gate signal of upper/lower arm
图4中GAP为A相上桥臂换向开关门极信号,GAN为下桥臂门极信号。其中,图4(a)所示的是前述通过自关断器件作为换向开关时上下桥臂子模块组的输出电压和换向开关驱动信号的配合情况;图4(b)所示的是采用晶闸管作为换向开关时上下桥臂子模块组的输出电压和换向开关驱动信号的配合情况。具体做法是:当换向开关门极信号发生变化时,并不像图4(a)中所示的立即改变所对应子模块组的输出电压,而是继续保持门极信号改变前的输出电压一段时间tf(如图4(b)中箭头所指部分所示)。 此时,加在待关断换向开关上的电压为负,流过晶闸管的正向电流下降过零,由于此前该换向开关上的门极信号已经为关断,晶闸管将关断;待开通晶闸管上所加电压开始变为正,由于此前该换向开关上的门极信号已经为开通,晶闸管将开通。把上述由反压产生的电流设为if,则存在如下等式:

其中,Ls为桥臂缓冲电抗器。由于tf通常很小,且if初值为0,则存在近似等式:

在设计换向开关控制策略时,应保证下式成立:

其中,If_max为换向开始时开关内出现的最大正向电流。
在满足这一设计原则的前提下,在控制器设计时可实时检测桥臂电流,若换向时桥臂电流为正(即晶闸管内正向)则保持待关断桥臂的子模块组继续输出参考电压,直到桥臂电流反向。图5给出了一种可能的换向开关控制实例逻辑框图。图中tf分为tf1、tf2和tf33个阶段,除了tf2作为等待电流下降的时间外,tf1的作用是防止电流过零时判定结果发生抖动(典型值为数百微秒),tf3的作用是在已关断的晶闸管两端保持反压一段时间(典型值为数百微秒)。
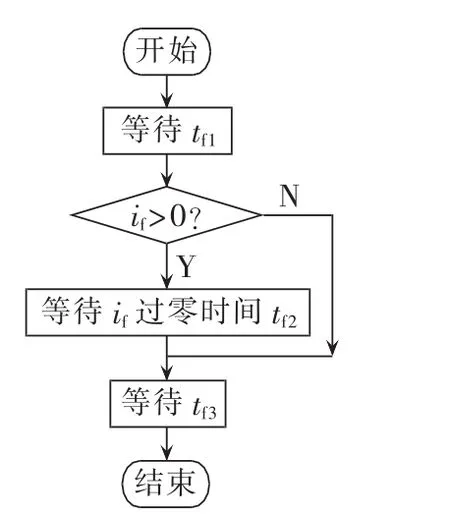
图5 换向开关控制实例Fig.5 Example of changeover switch control strategy
2.2 子模块控制策略
模块化多电平的子模块控制策略,即调制策略,主要分为PWM和最近电平调制(NLM)两大类。前者可以是载波移相PWM,也可以是SVPWM,其特点是在子模块较少的情况下仍可以获得满意的波形,畸变率低,但开关频率较高;后者把正弦波转化成阶梯波,通过选择性投切达到子模块均压的目的,其特点是在子模块较多的情况下可以获得满意波形且开关频率很低。所以,在已有工程和文献中,NLM方法应用于高电压、大功率的高压直流输电领域。
不同于传统MMC所使用的半H桥子模块,A2MC采用全H桥子模块。其主要特性区别在于,全H桥子模块除了可以产生正电平和零电平外,还可以产生负电平。这一特性产生的影响是:子模块组不仅可以输出正电压波形,亦可输出负电压波形,直流电压利用率有所提高;进行子模块排序时,在保证交流输出波形的前提下,桥臂电流为任意方向时,均可以实现子模块的充电或放电,使子模块均压控制更容易进行。
子模块控制的基本单位是位于每一桥臂上的子模块组。设每组子模块个数为M,其中冗余子模块(为了提高可靠性而热备用的子模块)个数为Mred,子模块直流电容额定电压为UC,则子模块组输出电压uAP的范围(以A相上桥臂为例)是:

由式(1)可以进一步得到,对于该子模块组应投入的子模块数,存在:

其中,NINT[]函数表示最近取整函数。若NAP为正,说明此时子模块组应有个子模块输出正电平,其余子模块输出零电平或正负电平成对输出;若NAP为负,说明此时子模块组应有个子模块输出负电平,其余子模块输出零电平或正负电平成对输出。这里所述的正负电平成对输出表示有一对子模块,其中一个输出正电平,另一个输出负电平,二者电平之和为零。具体控制哪一个子模块输出所需电平,应由桥臂电流方向决定。
为了更清晰地描述子模块控制策略,下面给出一种可能的子模块控制实例框图(以A相上桥臂为例),如图6所示。设桥臂电流iAP的正方向为从子模块组的正极流入,Ncou的定义如下:

其中,MIN[]为取最小值函数;NCMAX为投入个子模块后余下子模块中电压大于UC+Ucon的子模块数;NCMIN为投入个子模块后余下子模块中电压小于UC-Ucon的子模块数;Ucon为预先设定的子模块零输出的阈值。取最小值的作用在于保证子模块正负电平成对出现,设置阈值的作用在于控制电压本身已经非常接近额定值的子模块不参与充放电。
3 仿真验证
3.1 系统参数
为了验证A2MC的晶闸管换向方法,在PSCAD/EMTDC平台搭建了三相35kV的240子模块换流器的计算机仿真模型。模型交流侧通过三相电抗器接入无穷大系统,直流侧接入理想直流电压源。控制系统结构如图7所示。主电路参数及控制系统参数如下:Uac=35kV,Udc=±22.5 kV,UC=1 kV,Ucon=0.1 kV,C=3000 μF,Ls=3 mH,换流器交流电抗的电感值Lac=15 mH,换流器交流电抗的阻值Rac=0.24 Ω,M=40,PI控制器参数 K1=13.2 V/A、K2=2.64×103V/(A·S)、K3=13.2 V/A、K4=2.64×103V/(A·S)。
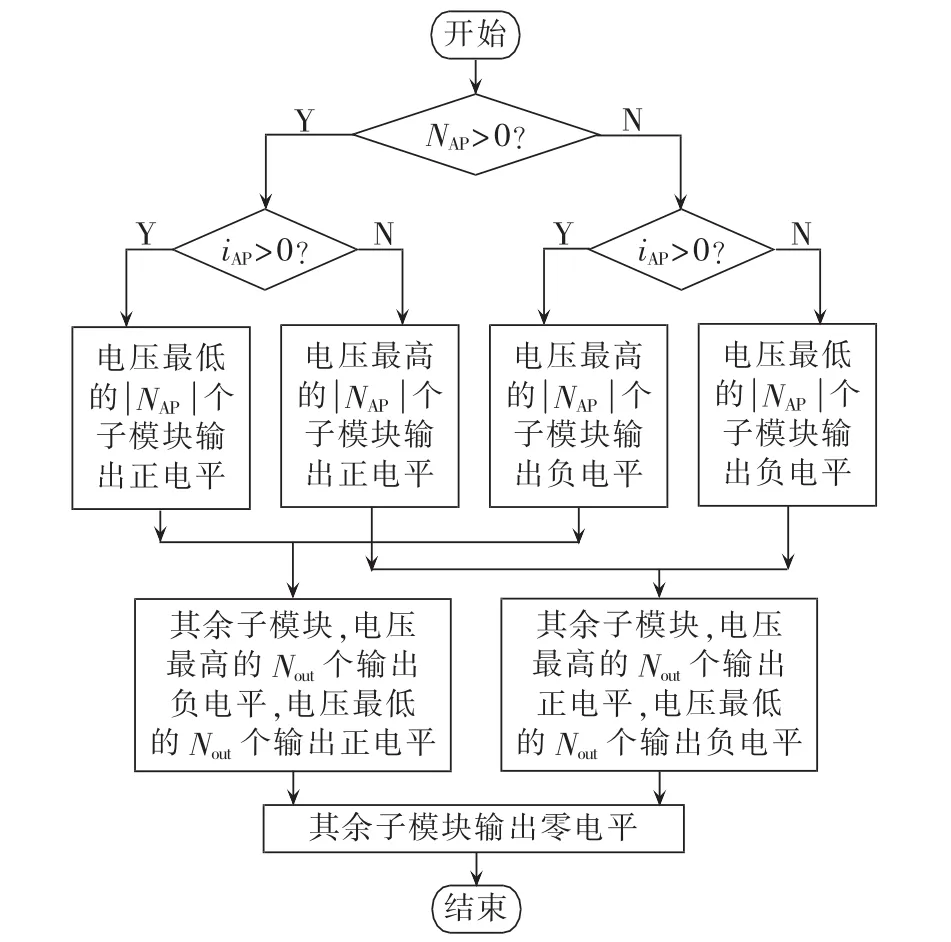
图6 子模块控制实例Fig.6 Example of submodule control strategy

图7 换流器控制实例Fig.7 Example of converter control strategy
3.2 仿真结果
图8为换流器向交流系统输出有功20MW、无功10 Mvar时0.1 s的换向过程仿真波形。换流器启动后经约0.03 s的过渡过程达到稳态。可得如下结论。
a.uac为换流器输出交流电压,iac为注入换流器的交流电流,稳态电流总畸变率小于3%。
b.ithy_P(实线)和 ithy_N(虚线)分别为 A 相上、下桥臂换向开关内流过的电流波形,uthy_P(实线)和uthy_N(虚线)分别为A相上、下桥臂换向开关两端的电压波形,2组波形体现了换向开关的换相过程。以第0.5s出现的换向过程为例,此时刻下桥臂开始导通,ithy_P和ithy_N迅速下降,其中ithy_N经由下桥臂换向开关的反并联二极管流通;经过约1~2 ms后,ithy_P过零,上桥臂晶闸管强制关断,uthy_P因恢复阻断而上升,电流iac转而由ithy_N提供,上下桥臂交替成功。

图8 换向过程仿真结果(0.1 s)Fig.8 Simulative results of switching process(0.1 s)
c.idc为直流侧注入换流器的电流,为了清晰体现换向过程对直流电流的影响,仿真中直流侧为理想电源未加滤波[15]。直流电流包括直流分量、6脉波动分量和高频分量,其中6脉波动分量由于桥臂交替导通产生,高频分量由于晶闸管强迫关断和子模块电压平衡控制造成。实际中由于直流侧阻抗和直流线路电容(特别是直流电缆线路)的影响,直流电流波动会有一定程度的改善。
d.uAP为A相上桥臂输出电压,GAP为A相上桥臂门极信号,显示出通过生成参考电压时的时间延迟进行了强迫关断。
换向过程仿真结果验证了A2MC的晶闸管换向方法的基本原理、换向开关控制策略和子模块控制策略,证明了使用晶闸管代替A2MC中的IGBT作为换向开关是可行的。
图9所示为换流器有功、无功给定值阶跃变化时的仿真波形,可得如下结论。
a.P和Q实线波形分别为换流器输出到交流系统的有功和无功功率,虚线波形为其所对应的有功、无功给定值。0 s时,有功给定值阶跃为15 MW,无功给定值阶跃为5 Mvar,在经历约0.1 s的调节过程后,有功、无功均达到并稳定在给定值;0.25 s时,无功给定值阶跃到-5 Mvar,在经历约0.05 s调节过程后,无功达到并稳定在给定值;0.5 s时,有功给定值阶跃为-15 MW,无功给定值阶跃为5 Mvar,在经历约0.1 s的调节过程后,有功、无功均达到并稳定在给定值;0.75 s时,无功给定值阶跃到-5 Mvar,在经历约0.05 s的调节过程后,无功达到并稳定在给定值。
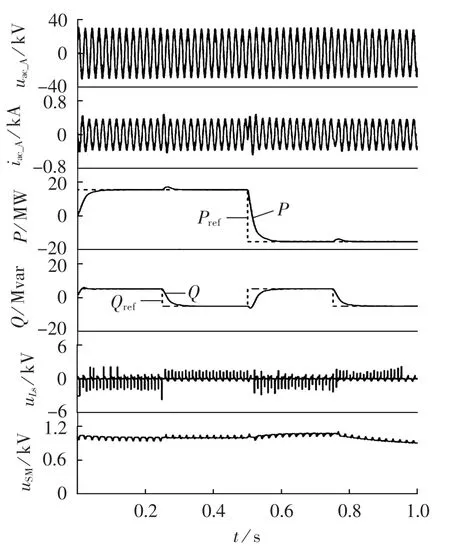
图9 功率阶跃仿真结果(1 s)Fig.9 Simulative results of power step change(1 s)
b.uLs为强制关断在桥臂电抗Ls上产生的尖峰电压,可以限制在-4~3 kV的范围内;uSM为A相子模块电压,波动范围约为±10%,子模块电压波动主要是子模块选择性投切造成的,可以通过合理选择桥臂缓冲电抗、子模块电容参数加以改善。
功率阶跃仿真结果验证了:在控制系统的调节下,换流器可以稳定运行在有功、无功的4个象限,实现有功、无功的双向可控;系统可以对给定值阶跃做出迅速响应,并在此过程中保持桥臂电抗尖峰电压和子模块电压波动均处在合理水平。
4 结论
a.给出了A2MC的晶闸管换向方法。尽管采用了桥臂交替导通的运行方式,但与传统A2MC不同的是换向开关采用了串联晶闸管,并通过强制关断策略,在保证A2MC运行特性不变的前提下,降低了成本和开关器件均压难度。
b.针对晶闸管换向开关的换向要求,给出了适用于所提出换向方法的控制策略。通过桥臂上的子模块组电压输出与晶闸管的门极信号控制相配合,对换向开关进行强制关断。
c.建立三相35 kV的240子模块换流器的计算机仿真模型,验证了晶闸管换向方法的基本工作原理,证明了理论分析和控制策略的可行性。
