多球平衡问题
2015-07-25邱为钢
邱为钢
(湖州师范学院理学院,浙江 湖州 313000)
多球平衡问题是中学物理竞赛训练常见题目,理想模型是多个光滑的球,约束在曲面(柱面或半球面)内,或者用绳子悬挂起来,求满足什么样的条件达到平衡.问题关键是求解受力平衡方程,常用方法是几何和三角函数法.其实用代数法(解析几何法)更加直观简单,且容易推广到三维空间.代数法是基于这样的思想:如果一个物理矢量,例如力,已经确定与一个几何矢量方向相同,那么这个物理矢量必定与这个几何矢量成比例关系,它们的分量之间也成比例关系,且分量之间的比例系数相同.这个比例系数是常数,有量纲.为集中讨论,本文只考虑悬挂多球平衡问题.
先讨论3球问题,用两个相同长度的绳子拴住两个一样的球,挂在天花板上的同一顶点上,两球接触,然后再把第3个球放在两球上,松手,看这3个球能否达到平衡.(这是假想模型,你试着做做实验看呢,有问题吗?)假定3球达到平衡,设第3个球的球心O为原点,坐标为(0,0),半径为r,质量为m.前两个球球心为O1,O2坐标分别为(x,-y),(-x,-y),半径为R,质量为M.天花板上顶点H坐标为(0,h),绳子长度为l,如图1所示.
两球的球心距离为OO1=R+r,即有
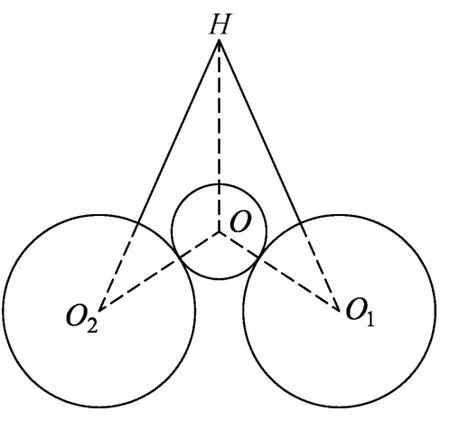
图1 悬挂了球示意图

顶点到球心距离为HO1=l+R,即有

绳子中张力方向与矢量相同,由对称性,设比例系数都为λ,即

两球的相互作用力方向与矢量相同,由对称性,设比例系数都为k,即

3个球受力平衡,两个绳子中张力和3个小球重力矢量和为0,即

对第1个小球来说,绳子张力,重力和第3个小球对它的作用力之和为0,即

由(6)式解得

由(5)式解得



第3个小球到绳子的距离d为

考虑实际约束条件,第3个小球碰不到绳子,即d>r,或者



不等式(12)成立的必要条件是对应的判别式大于等于0,计算得到

(13)式含义是质量比η越大,半径比τ越大,越容易达到平衡位形,这与实际经验相符.如果3个小球完全一样,那么(13)式取等号,这就意味着3球平衡问题只能取一种平衡位形,与文献[1]的结论一致.



4球受力平衡,3个绳子中张力和4个小球重力矢量和为0,即

对第1个小球来说,绳子张力,重力和第4个小球对它的作用力之和为0,即

由(18)式解得

由(17)式解得

由(19)和(20)式解得

第4个小球到绳子的距离d是

考虑实际约束条件,第4个小球碰不到绳子,即d>r,或者

(23)式两边平方,并利用(1)和(2)式,且定义半径比为τ=R/r,那么(23)式化为

不等式(24)成立的必要条件是对应的判别式大于等于零,计算得到

对比(25)和(13)式,说明实际4个小球比理想模型3个小球更加容易达到平衡,这也符合实际经验.如果4个小球完全一样,那么(25)式成立,这就意味着4球体系可以存在平衡位形,推广了文献[1]的结论.各个参数,例如坐标,张力等可以求解(1),(2),(19),(20)得到,不再具体给出.
由此看来,考虑一个物理问题,我们必须从实际出发,而不是只研究简化模型,例如实际问题是4球平衡,而为什么常见题目只考虑3球?还有,对于理论模型,能不能真的去实验一下,看看会不会发生你意料不到的问题.有问题了,就有可能有新的发现.
1 黄尚鹏.警惕3球平衡问题的陷阱[J].物理通报,2014(11):54-56.
