基于杂波数据Frobenius范数拟合的阵元误差估计方法
2015-06-05姜磊,王彤
姜 磊,王 彤
(西安电子科技大学雷达信号处理国家重点实验室,陕西西安710071)
基于杂波数据Frobenius范数拟合的阵元误差估计方法
姜 磊,王 彤
(西安电子科技大学雷达信号处理国家重点实验室,陕西西安710071)
机载雷达的阵元误差会影响运动目标的参数估计与定位性能。为了解决这个问题,提出一种基于杂波数据Frobenius范数拟合的阵元误差估计方法。该方法首先利用杂波谱分布结构和雷达构型参数计算杂波空时导向矢量矩阵,接着利用截断的奇异值分解求解杂波幅度矢量并重构杂波数据,最后将实际的数据矩阵与重构的数据矩阵进行Frobenius范数拟合来估计阵元误差。数值仿真实验结果表明,该方法在低脉冲数目、低样本数目的情况下均具有较好的参数估计精度与稳健性。
机载雷达;阵元误差估计;杂波数据重构;截断奇异值分解;范数拟合
0 引 言
机载雷达在下视工作时会受到地面杂波的影响。由于载机与地面的相对运动,杂波多普勒谱会出现展宽,给运动目标检测带来困难。空时自适应处理[13](space time adaptive processing,STAP)是一种联合空域和时域的二维滤波技术,它可以有效抑制杂波,提高雷达对运动目标的检测能力。
在理想情况下,STAP可以取得较好的性能,然而在实际的工程应用中,机载雷达系统不可避免地存在着各种误差。在目前的技术水平下,时间维的精度通常较高,其误差一般可以忽略不计;空间维则不一样,由于制造工艺的限制,各个接收阵元之间的幅相特性常常存在不一致性。当雷达系统中存在阵元误差这种非理想因素时,基于STAP的运动目标参数估计与定位性能受到很大的影响[4-5]。因此,阵元误差的估计或校正具有重要的实际意义。
阵元误差的校正主要可以分为有源校正和自校正两类。有源校正[6-7]是利用外部精确已知的辅助信源对阵元误差进行离线校正的方法,该方法理论上可以取得较好效果,但对辅助信源有较高的性能要求,并且增加了系统的复杂度。本文关注于阵元误差的自校正方法。自校正是将阵元误差校正转化为一个参数估计问题,即利用接收的回波数据对阵元误差进行估计。对于机载动目标显示雷达来说,其接收的回波主要为杂波分量,此时就可以利用杂波数据来估计阵元误差。文献[8]提出基于相邻阵元干涉的方法,该方法以一个阵元作为参考,利用参考阵元与其他阵元接收回波间相位历程的关系来估计阵元误差。该方法运算量低,但是在杂噪比较低、驻留时间较短的情况下性能较差。文献[9]提出基于主瓣杂波特征矢量的方法,该方法取主瓣杂波对应的多普勒频率的数据计算空域协方差矩阵,然后将空域协方差矩阵特征分解取最大特征值对应的特征矢量作为实际的导向矢量。该方法在雷达多普勒分辨率较高时可以取得较好的效果,然而机载动目标显示雷达为了实现对运动目标较高的重访率,其在单个波位发射的脉冲数目较少,此时主瓣杂波特征矢量法性能下降。文献[10]提出基于杂波子空间的方法,该方法利用杂波分布构型参数与实际数据,分别构造理论杂波正交补空间与实际杂波子空间,然后利用两者的正交性估计阵元误差。该方法在雷达相干积累时间较短的情况下,可以取得较好的效果,然而内杂波运动、通道失配等因素会导致子空间泄漏[11],此时子空间正交性下降,阵元误差估计性能出现下降。
为了提高阵元误差的估计精度与稳健性,本文提出一种基于杂波数据Frobenius范数拟合的阵元误差估计方法。该方法通过拟合实际接收的杂波数据与由杂波谱分布轨迹重构得到的杂波数据来得到阵元误差的估计。仿真实验分析表明,本文方法在低样本数目、低脉冲数目的情况下均能取得良好的参数估计精度与稳健性。
1 信号模型
机载脉冲多普勒雷达几何结构如图1所示。载机速度为v,速度方向沿x轴正方向,载机高度为h。阵列为由N个阵元组成的等距线阵,阵元间距为d,阵列轴向沿x轴方向。雷达在一个相干处理间隔内发射M个脉冲,脉冲重复频率为fr,雷达工作波长为λ,地面杂波块相对于雷达的方位角与俯仰角分别为φ与θ。雷达在接收时对每个阵元的回波数据进行采样、录取。

图1 机载雷达平台几何结构
按照图1的平台几何结构,地面杂波块相对于雷达的归一化多普勒频率为

归一化空间频率

则杂波块对应的时域导向矢量与空域导向矢量可以表示为

对应于单个距离环,各个阵元接收的杂波分量的信号形式为

式中,⊙表示Hadamard积;⊗表示Kronecker积;α为不同方位角对应的杂波块的接收电压幅度;ts为阵元响应矢量,具体形式为

式中,γi为阵元幅度误差;βi为阵元相位误差。将式(3)进行适当整理,可以得到

式中,v=vt⊗vs为杂波空时导向矢量;t=1⊗ts为锥削矢量,表示阵元对杂波信号的调制。
雷达在每个距离单元接收的空时快拍数据为

式中,xn表示高斯白噪声分量。
2 算法原理
2.1 基于截断的奇异值分解的杂波数据重构


此时在角度多普勒域将杂波离散化采样后,重构的杂波信号可以表示为

为了使实际的量测数据与重构的杂波数据之间均方误差最小,可以得到以下优化问题:

式中,‖·‖F表示Frobenius范数;X=[x1,…,xK]为量测的数据矩阵。
将式(9)展开,可以得到

式(10)可以等效为K个独立的优化问题,即

式中,‖·‖2表示2范数。
式(11)是一个线性欠定最小二乘问题,理论上可以采用正规方程或QR分解法求解。但由于空时导向矢量矩阵V是一个超完备矩阵,其列矢量之间存在相关性。在这种情况下,矩阵V的条件数cond(V)数值过大:

式中,cond(·)表示矩阵的条件数;σmax、σmin分别为V的最大与最小奇异值。
根据扰动分析理论[12],最小二乘方法参数估计精度的界限为

由式(13)可以看出,当cond(V)数值过大时,线性系统式(11)的敏感程度较高,微小的噪声扰动将导致估计值严重偏离实际值。
为了提高数值求解的稳健性,本文采用截断的奇异值分解(truncated singular value decomposition,TSVD)方法[1314]求解式(11)。此时,将导向矢量矩阵V展开,并且对其进行秩r截断,可以得到

式中,ui、wi与σi分别对应于V的左奇异矢量、右奇异矢量与奇异值。r为V的数值秩(或称为有效秩),可以按照以下准则计算

式中,η为一个接近于1的常数。选取使式(15)成立的最小q值作为V的数值秩r。
根据式(14)可以计算得到秩r截断后新的导向矢量矩阵的条件数为cond(Vr)=σ1/σr,其远小于原有的量测矩阵的条件数cond(V)=σ1/σNM。因此,线性系统的稳健性得到提高。
此时式(11)对应的优化问题需修正为

对应的解为

2.2 基于Frobenius范数拟合的阵元误差估计
由于杂波信号通过天线时会受到阵元误差的影响,为了提高重构的杂波信号的准确性,需对做相应处理,以补偿阵元误差带来的影响。由式(5)可知,阵元对杂波信号的调制表现为理想杂波信号点积上锥削矢量。按照这个模型,将重构的杂波信号修正为

此时可以通过拟合实际的量测数据与补偿后重构的杂波数据来估计,对应的目标函数为

根据分块矩阵的加法性质,式(19)可以展开表示为

式(20)可以等效表示为

式中,Yk=diag()。
根据Kronecker积的性质可以得到

式中,IN为N×N维的单位阵。
将式(22)代入式(21)中,同时令P=(1⊗IN),可以得到

根据矩阵Frobenius范数的性质,可以得到

式中,vec(·)为矩阵矢量化算子,表示将矩阵按列重排为一个列矢量。
因此,式(23)可以等效表示为
式中,Zk=YkP。
根据分块矩阵乘法性质,式(25)做适当整理可以得到

此时可以看出,式(26)为一个无约束最小二乘问题,对应的解为

本文所提出的基于杂波数据Frobenius范数拟合的阵元误差估计方法的主要步骤如下所示:
步骤1利用式(1)、式(2)与式(7)计算杂波谱线对应的基矩阵V;
步骤2利用式(8)、式(17)重构杂波数据矩阵;
步骤3利用式(19)、式(27)估计阵元误差。
3 仿真分析
本节通过计算机仿真实验验证本文方法的性能。仿真实验参数设置为:雷达载频为1 200 MHz;脉冲重复频率为2 000 Hz;天线阵元数目为10,阵元间距为0.125 m;载机高度为5 km,速度为100 m/s;杂噪比为50 d B;阵元误差中幅度误差为5%,相位误差为5°;计算数值秩时的门限设为0.99。仿真时考虑无去相关效应和有去相关效应(内杂波运动、通道起伏等非理想因素导致)两者情况,其中杂波去相关的形式参考文献[11]所提出的数学模型。实验中将本文提出的杂波数据Frobenius范数拟合法与文献[8]提出的相邻阵元干涉法,文献[9]提出的主瓣杂波特征矢量法以及文献[10]提出的杂波子空间正交法进行对比分析。文中以均方根误差(root mean square error,RMSE)为准则衡量各方法性能,相应的形式为

实验1中设置脉冲数目为128,分析各方法性能和距离样本数目的关系,所得结果如图2、图3所示。由图2、图3可以看出,在样本数目较少的情况下,杂波子空间正交法与Frobenius范数拟合法优于相邻阵元干涉法与主瓣杂波特征矢量法。这是因为相邻阵元干涉法与主瓣杂波特征矢量法在样本数目较少的情况下受到噪声起伏扰动的影响较大。由图2、图3还可以看出,当存在去相关效应时,Frobenius范数拟合法优于杂波子空间正交法,这是因为去相关效应会导致杂波子空间扩散,从而使得杂波子空间向噪声子空间泄漏,两者之间的正交性减弱,杂波子空间正交法性能下降,而Frobenius范数拟合法是一种基于范数拟合的参数化估计方法,其利用数据矩阵本身而不是对应的子空间来估计阵元误差,使得其对子空间泄漏问题具有稳健性。

图2 幅度误差RMSE随距离样本数目变化曲线
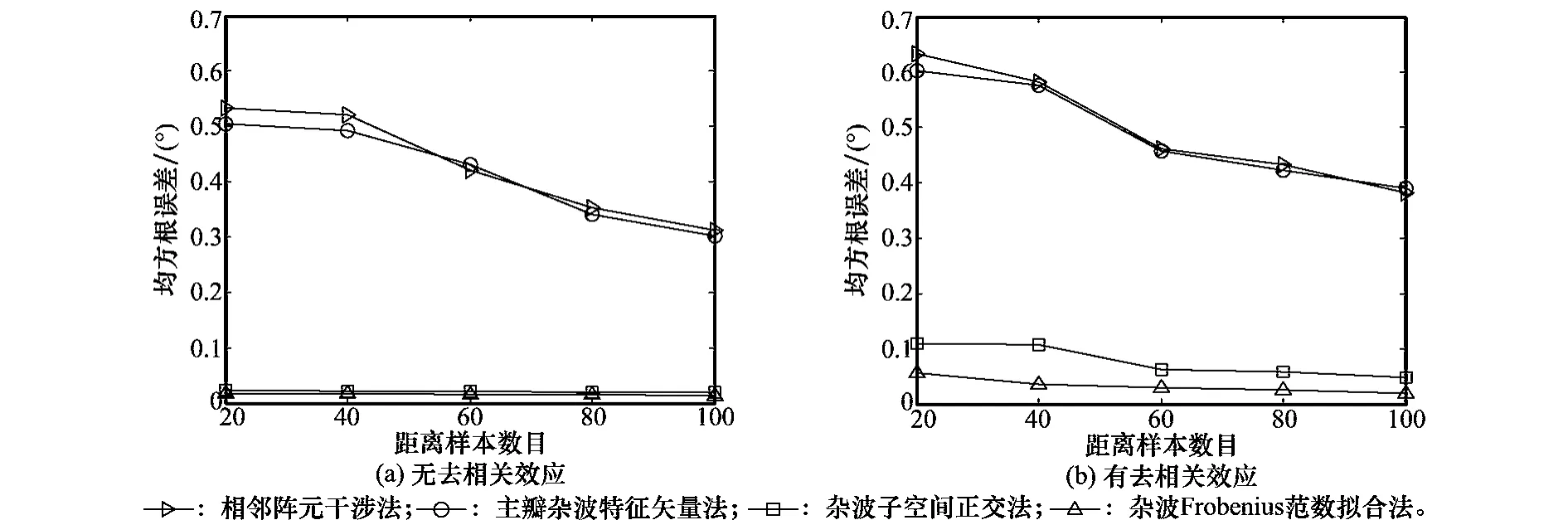
图3 相位误差RMSE随距离样本数目变化曲线
实验2中设置距离样本数目为100,分析各算法性能和发射脉冲数目的关系,所得结果如图4、图5所示。由图4、图5可以看出,在脉冲数目较少的情况下,杂波子空间正交法与Frobenius范数拟合法优于相邻阵元干涉法与主瓣杂波特征矢量法。这是因为在脉冲数目较少的情况下,多普勒分辨率较低,天线主瓣对应的多普勒带宽较大。此时,相邻阵元干涉法和主瓣杂波特征矢量法假设的主瓣杂波近似于单频信号的模型不再成立,而Frobenius范数拟合法是一种基于原始空时数据拟合的方法,与多普勒分辨率的好坏无关,只要杂波谱线准确,就可以获得良好的参数估计精度。

图4 幅度误差RMSE随脉冲数目变化曲线

图5 相位误差RMSE随脉冲数目变化曲线
实验3中设置脉冲数目为32,距离样本数目为20,分析本文方法性能与计算数值秩时的门限η的关系,所得结果如图6所示。由图6可以看出,当η在0.99~0.998之间变化时,算法性能变化不大。这是因为空时导向矢量矩阵V奇异值分解后得到的奇异值分为主奇异值与次奇异值两部分。次奇异值是导致线性系统数值求解不稳健的因素,而次奇异值的数值极小,其占总的奇异值能量的比重较小。η设为0.99或者0.998计算得到的数值秩r变化不大,因此参数估计性能也相对保持平稳。需要指出的是,η取值不宜过于接近于1,因为此时计算得到的r接近于NM,TSVD方法退化为传统的正规方程法。

图6 阵元误差RMSE随数值秩门限变化曲线
实验4中设置脉冲数目为64,距离样本数目为60,分析系统参数存在误差时本文方法的性能。Frobenius范数拟合法在计算杂波分布曲线时需要利用系统构型参数,其可以通过惯性导航系统(inertial navigation system,INS)获得。实际中由于INS的精度问题,雷达获取的参数与实际的参数之间存在偏差,因此需要研究系统参数误差对本文方法的影响。实验所得结果如图7所示。由图7可以看出,当存在系统参数误差时,相邻阵元干涉法、主瓣杂波特征矢量法、杂波子空间正交法以及Frobenius范数拟合法性能均出现下降。对于相邻阵元干涉法与主瓣杂波特征矢量法,这是由于杂波多普勒中心计算不准确;对于杂波子空间正交法与Frobenius范数拟合法,这是由于杂波分布曲线位置不准确。因此,本文所提出的Frobenius范数拟合法在实施时,对系统构型参数的精确性有较高要求。

图7 阵元误差RMSE随惯导精度变化曲线
4 结 论
本文提出了一种基于杂波数据Frobenius范数拟合的阵元误差估计方法,其基本思想是通过拟合由杂波分布谱线重构的数据和实际的接收数据来估计阵元误差。仿真实验结果表明,该方法在低样本数目、低脉冲数目的情况下均能有较好的参数估计性能。此外,当存在去相关效应时,该方法仍然具有较好的参数估计精度,说明其具有较好的稳健性。需要指出的是,本文方法能取得良好性能的重要前提条件是杂波分布曲线准确已知,这就要求系统的构型参数足够精确。若系统参数不准,将造成本文方法性能下降。一种不依赖于系统参数的全自适应的范数拟合方法值得进一步研究。
[1]Melvin W L.A STAP overview[J].IEEE Aerospace and Electronic Systems Magazine,2004,19(1):19- 35.
[2]Liu W J,Xie W C,Wang Y L.AMF and ACE detectors based on diagonal loading[J].Systems Engineering and Electronics,2013,35(3):463- 468.(刘维建,谢文冲,王永良.基于对角加载的自适应匹配滤波器和自适应相干估计器[J]系统工程与电子技术,2013,35(3):463- 468.)
[3]Li H,Zheng J Z,Wu R B,et al.Novel parameter estimation method for moving targets based on reconstructing signals and L1 norm[J].Systems Engineering and Electronics,2014,36(11):2172- 2177.(李海,郑景忠,吴仁彪,等.基于重构信号和L1范数的动目标参数估计方法[J].系统工程与电子技术,2014,36(11):2172- 2177.)
[4]Blum R S,McDonald K F.Analysis of STAP algorithms for cases with mismatched steering and clutter statistics[J].IEEE Trans.on Signal Processing,2000,48(2):301- 310.
[5]Hersey R K,Showman G A,Culpepper E.Clutter-based array calibration for enhanced geolocation accuracy[C]∥Proc.of the IEEE Radar Conference,2013:1- 5.
[6]Pawlak H,Jacob A F.An external calibration scheme for DBF antenna arrays[J].IEEE Trans.on Antennas and Propagation,2010,58(1):59- 67.
[7]Salas-Natera M A,Martinez Rodriguez-Osorio R,de Haro L.Procedure for measurement,characterization,and calibration of active antenna arrays[J].IEEE Trans.on Instrumentation and Measurement,2013,62(2):377- 391.
[8]Le Chevalier F,Savy L,Durniez F.Clutter calibration for spacetime airborne MTI radars[C]∥Proc.of the International Conference on Radar,1996:82- 85.
[9]Melvin W L,Showman G A.An approach to knowledge-aided covariance estimation[J].IEEE Trans.on Aerospace and Electronic Systems,2006,42(3):1021- 1042.
[10]Jiang L,Wang T.Array error estimation using subspace-based approach[J].Systems Engineering and Electronics,2014,36(4):656- 660.(姜磊,王彤.基于子空间的阵元误差估计方法[J].系统工程与电子技术,2014,36(4):656- 660.)
[11]Guerci J R,Bergin JS.Principal components,covariance matrix tapers,and the subspace leakage problem[J].IEEE Trans.on Aerospace and Electronic Systems,2002,38(1):152- 162.
[12]Hansen P C.Discrete inverse problems:insight and algorithms[M].Philadelphia:SIAM press,2010.
[13]Hansen P C.Truncated singular value decomposition solutions to discrete ill-posed problems with ill-determined numerical rank[J].SIAM Journal on Scientific and Statistical Computing,1990,11(3):503- 518.
[14]Gratton S,Titley-Peloquin D,Ilunga J T.Sensitivity and conditioning of the truncated total least squares solution[J].SIAM Journal on Matrix Analysis and Applications,2013,34(3):1257- 1276.
[15]Grant M,Boyd S.CVX:matlab software for disciplined convex programming,version 2.0[EB/OL].[2014- 11- 5].http:∥cvxr.com/cvx.
[16]Boyed S,Vandenberghe L.Convex optimization[M].Cambridge,U K:Cambridge University Press,2004.
Array error estimation based on Frobenius norm fitting of clutter data
JIANG Lei,WANG Tong
(National Lab of Radar Signal Processing,Xidian University,Xi’an 710071,China)
In the airborne radar system,the parameter estimation and geolocation accuracy of moving targets will be affected by array error.To deal with this problem,a array error estimation method based on Frobenious norm fitting of clutter data is proposed.Firstly,the clutter space-time steering matrix is computed by using the knowledge of clutter distribution and radar geometry parameters.Then,the truncated singular value decomposition method is utilized to estimate the clutter amplitude vector and reconstruct the clutter data.Finally,array error is estimated by minimizing the distance induced by the Frobenious norm between the
data and the reconstructed data.Numerical simulation results validate that the method can achieve a fine parameter estimation accuracy and provide robustness when the number of snapshots or pulses is limited.
airborne radar;array error estimation;reconstructed clutter data;truncated singular value decomposition;norm fitting
TN 959.73
A
10.3969/j.issn.1001-506X.2015.12.08
姜 磊(198-7- ),男,博士研究生,主要研究方向为阵列信号处理、空时自适应信号处理。
E-mail:jianglei0823@gmail.com
王 彤(197-4- ),男,教授,博士,主要研究方向为合成孔径雷达成像、机载雷达运动目标检测。
E-mail:twang@mail.xidian.edu.cn
1001-506X(2015)12-2713-06
2014- 12- 12;
2015- 03- 17;网络优先出版日期:2015- 05- 28。
网络优先出版地址:http://www.cnki.net/kcms/detail/11.2422.TN.20150528.0920.001.html
国家自然科学基金(61372133)资助课题
