蛇形臂机器人装配系统研究*
2015-05-30中航工业北京航空制造工程研究所
中航工业北京航空制造工程研究所
数字化制造技术航空科技重点实验室 姚艳彬 杜兆才 魏志强
目前,飞机中存在大量诸如盒段、进(排)气道等具有复杂狭窄内腔特征的零部件需要进行装配作业。例如,翼盒内腔需要进行涂胶、去毛刺、多余物清除等装配作业。飞机复杂狭窄内腔的装配质量直接影响飞机的安全性、疲劳寿命以及稳定性。对于复杂狭窄内腔装配,人工操作难度高、劳动强度大、效率低。常规的自动装配系统由于尺寸的限制也很难完成此类作业。蛇形臂机器人具有长径比大、自由度多、运动灵活以及环境适应能力强等优点,是解决复杂狭窄内腔装配难题的最佳方案。
目前,国外许多研究机构已经对应用于安检、医疗以及航空制造等领域的蛇形机械臂机器人进行了比较深入的研究。美国波士顿大学研制了一种用于临床医疗手术的蛇形臂机器人Concentric-tube[1-2],该机器人由3个空心柔性管嵌套组成,共有6个自由度,通过改变每跟管子旋转的角度和伸出的距离,就可以改变整个机器人的长度和弯曲度实现机器人形状的控制,进而完成相关的医疗手术。MICHAEL和IAN[3]设计了一种名为Elephant's Trunk的用于抓取物体的蛇形臂机器人。该机械臂由16个虎克铰构成,该蛇形臂结构紧凑,变形更加均匀平滑。在后续工作中,IAN和MICHAEL建立了Elephant's Trunk Manipulator的数学模型,使用基于图像的形状检测法对该机械臂的性能进行了进一步研究。英国OC Robotics公司为空客英国公司开发了一类蛇形臂机器人[4],能够钻入机翼内部进行检测、紧固和密封(见图1),为蛇形臂机器人在航空制造领域的工程化应用前进了一大步,但其核心技术仍处于技术封锁状态。

图1 OC Robotics蛇形臂机器人
国内开展蛇形臂机器人的研究起步较晚,因此取得的相关研究成果相对较少。HU 和WANG等[5]研制了一种新型的结肠镜蛇形臂机器人(见图2)。该机器人总长600mm,直径12mm,共分5段,每段具有2个自由度,机器人每段均通过钢丝绳由直流电机驱动。在航空基金项目“飞机装配用蛇形臂结构研究”的支持下,北京航空制造工程研究所研制了一套具有8个自由度的蛇形臂机器人原理样机(见图3)。
总之,目前面向飞机复杂狭窄内腔装配的蛇形臂机器人技术,在航空制造发达国家已处于技术验证和初期应用阶段,但其相关核心技术仍处于技术封锁状态。国内关于蛇形臂机器人的研究已取得了一定的成果,但与国外相比,无论在理论研究还是工程化应用方面都存在很大差距,面向飞机装配的蛇形臂机器人研究尚未见诸报道。基于国内外研究情况,针对飞机复杂狭窄内腔装配需求,本文针对蛇形臂机器人装配系统进行了研究,涉及仿生机器人、飞机数字化柔性装配以及视觉导航等技术。
蛇形臂机器人装配系统总体架构
根据复杂狭窄内腔结构、装配需求以及蛇形臂机器人的特点,总结出面向复杂狭窄内腔的蛇形臂机器人装配系统总体架构如图4所示。
蛇形臂机器人装配系统主要包括蛇形臂机器人、视觉导航系统、末端执行器、移动定位系统以及上位机及远程操控系统5大模块。蛇形臂机器人是装配系统的核心,主要作用是根据装配任务移动末端执行器到目标位置;视觉导航系统一般安装在蛇形臂末端,用于空间场景识别、检测障碍物并向上位机反馈空间场景及障碍物位置特征,实现机器人避障运动;末端执行器主要用于执行涂胶、检测、去毛刺等装配作业;移动定位系统主要用于扩展蛇形臂机器人的运动范围,可根据任务需求使用工业机器人或AGV小车;上位机及远程操控系统主要用于监控系统运行状态并进行远程操作,可通过PC、笔记本或多功能操纵杆采用自动、半自动或手动模式操控机器人运动。
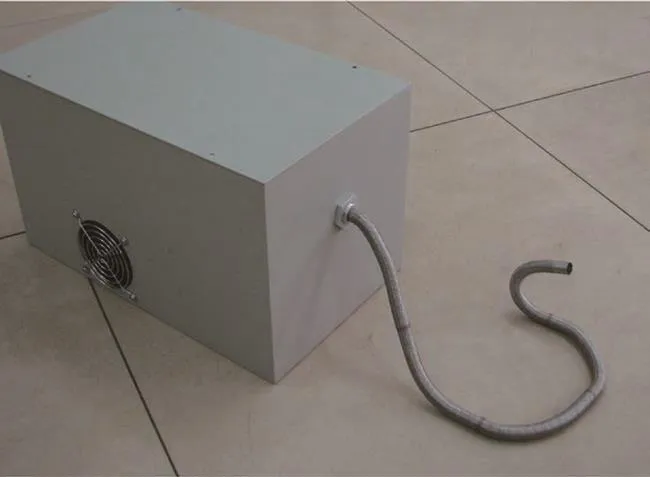
图2 结肠镜蛇形臂机器人

图3 8自由度蛇形臂机器人
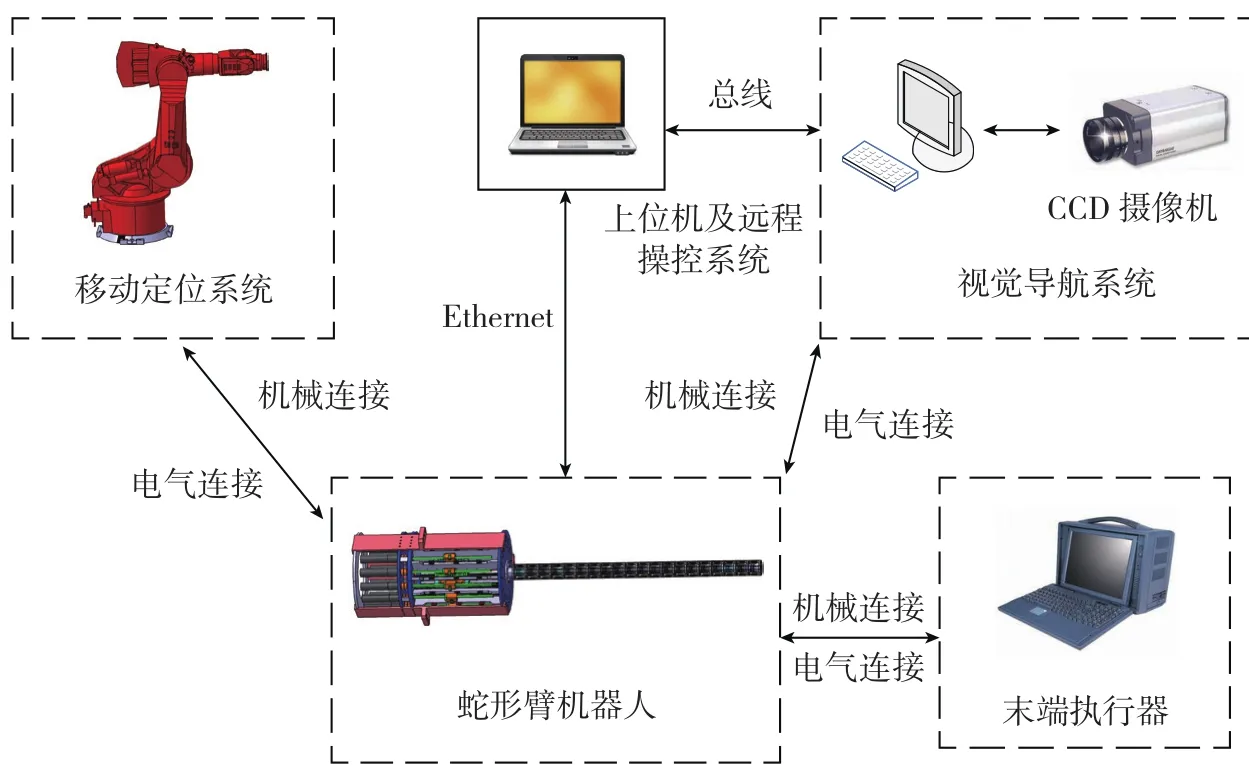
图4 蛇形臂机器人装配系统
蛇形臂机器人装配系统在飞机装配中得到应用,需突破蛇形臂结构仿生设计、非结构化环境视觉导航以及柔索驱动多轴协同控制3大关键技术。以下分别从蛇形臂机器人仿生结构、视觉导航系统和控制系统3方面对蛇形臂机器人装配系统进行论述和分析。
蛇形臂机器人仿生结构设计

图5 蛇类脊椎骨结构图
蛇类是爬行动物无肢进化的顶点,它的肌肉和骨骼组成的关节比较复杂, 具有多自由度[6]。一条蛇往往有100~400根脊椎骨。但每根脊椎骨的构造十分简单,每根脊椎骨的突起可以和相邻脊椎骨的凹陷结合(见图5), 形成一个类球铰结构。通过周围肌肉的伸缩, 实现关节间相对的转动。
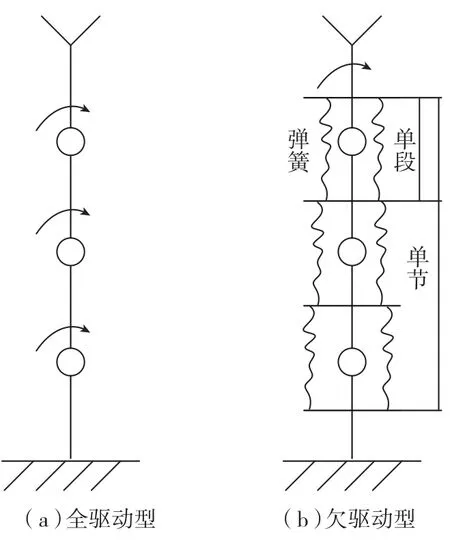
图6 蛇形臂结构示意图
根据蛇类脊椎骨结构特征及运动机理, 蛇形臂可采用一系列球铰或虎克铰串联构成中心脊椎。根据是否含有欠驱动关节以及关节驱动位置,蛇形臂可分为全驱动型和欠驱动型两类。全驱动型蛇形臂每个铰链均为主动关节(见图 6(a)),该类型机器人为超冗余度机器人范畴。欠驱动型蛇形臂由若干节串联构成,每节由若干段组成,每段包括一个铰链。每节末端铰链为主动关节,其余铰链均为被动关节,外部用弹簧保持刚度和形状(见图6(b))。该类型的蛇形臂机器人是一种仿连续体机器人。
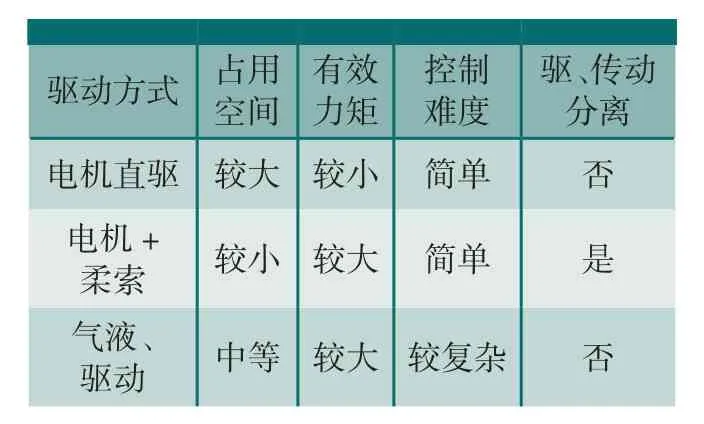
表1 蛇形臂驱动方式对比
适合蛇形臂的驱动方式有电机直驱、电机+柔索驱动和气液驱动,3种驱动方式的特点比较见表1。
经综合对比分析,电机+柔索的驱动方式适合用于面向飞机装配的蛇形臂机器人,采用该驱动方式的蛇形臂具有体积小、质量轻、结构相对简单且驱动与传动分离等优点。
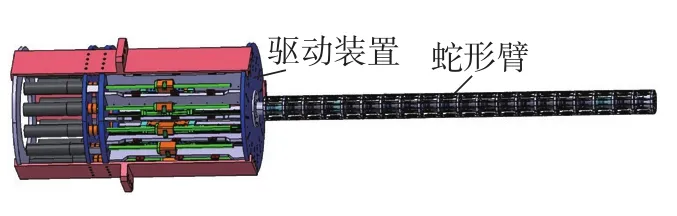
图7 蛇形臂机器人本体总体结构图
根据蛇形臂的结构和驱动特性,可将蛇形臂机器人本体可划分为蛇形臂模块以及驱动装置(见图7),驱动装置位于蛇形臂底部。
视觉导航系统
视觉导航系统用于向上位机和控制系统提供未知环境中的障碍物和目标等位置信息,进而指导蛇形臂机器人实现自主避障,完成狭窄空间内的装配作业。
1 硬件设计与实现
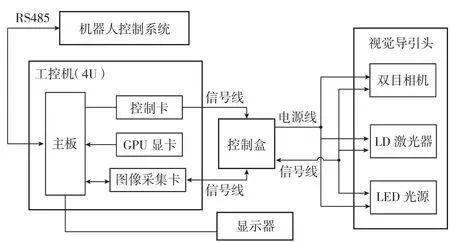
图8 视觉导航系统硬件连接示意图
视觉导航模块的硬件系统主要由两台微型相机、LD激光器、环形LED光源、控制盒、工控机以及实时图像显示器6部分组成。其中,两台微型相机安装在蛇形臂末端,其光轴为平行分布。图8为视觉导航系统硬件连接示意图。
微型相机的主要作用是辅助机器人识别场景中的障碍物和目标物体;LD激光器用于为视觉相机提供前方空间中物体的轮廓信息;LED照明光源主要是在黑暗的环境中提供照明;控制盒主要是为相机、激光器和光源提供电能,负责控制相机信号的采集与传输;工控机负责信息的处理和控制信号的发送;实时图像显示器用于将采集到的图像以及处理结果显示给操作用户。
2 软件设计与实现
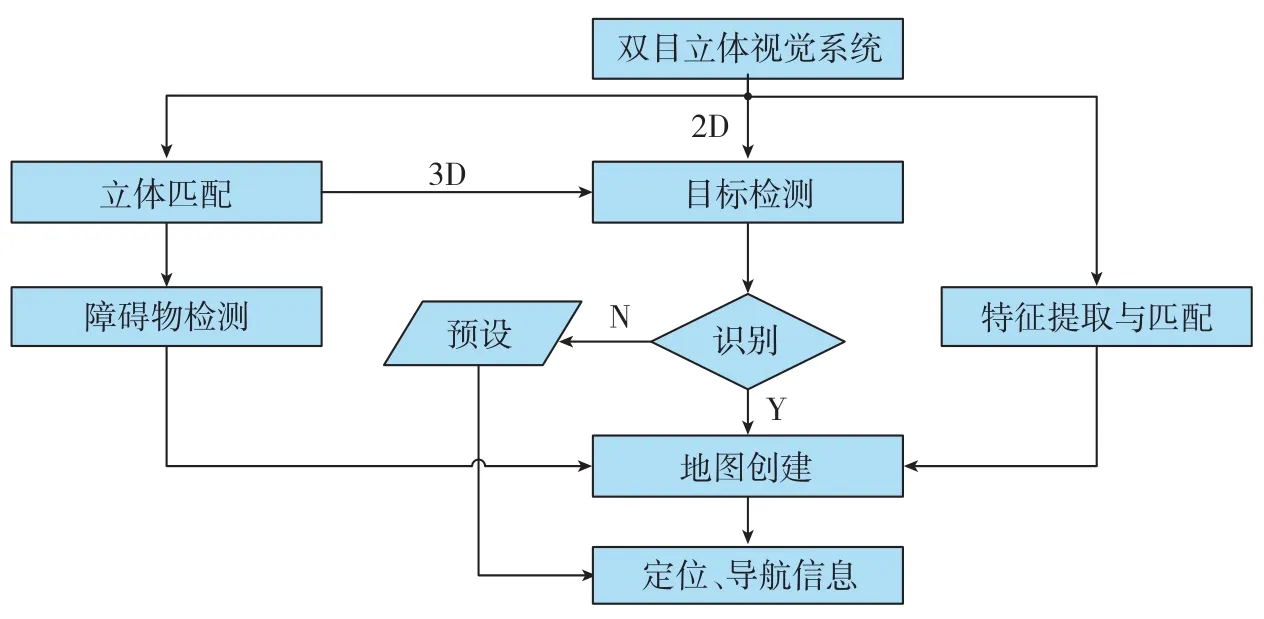
图9 视觉导航软件程序流程
视觉导航软件系统主要用于计算目标和障碍物的位置信息、双目立体视觉标定、图像显示以及光源光强控制等任务。根据任务和功能需求,视觉导航软件系统程序流程如图9所示。
控制系统设计
蛇形臂机器人采用柔索驱动,电机数量多,对多轴协调控制要求高,柔索驱动多轴协调控制的性能将直接决定蛇形臂的运动能力。
1 硬件设计与实现
蛇形臂机器人的实时性及复杂性对控制系统提出较高要求,为了实现系统精确控制,采用基于工控机IPC与UMAC多轴运动控制器的多轴协调控制方法。
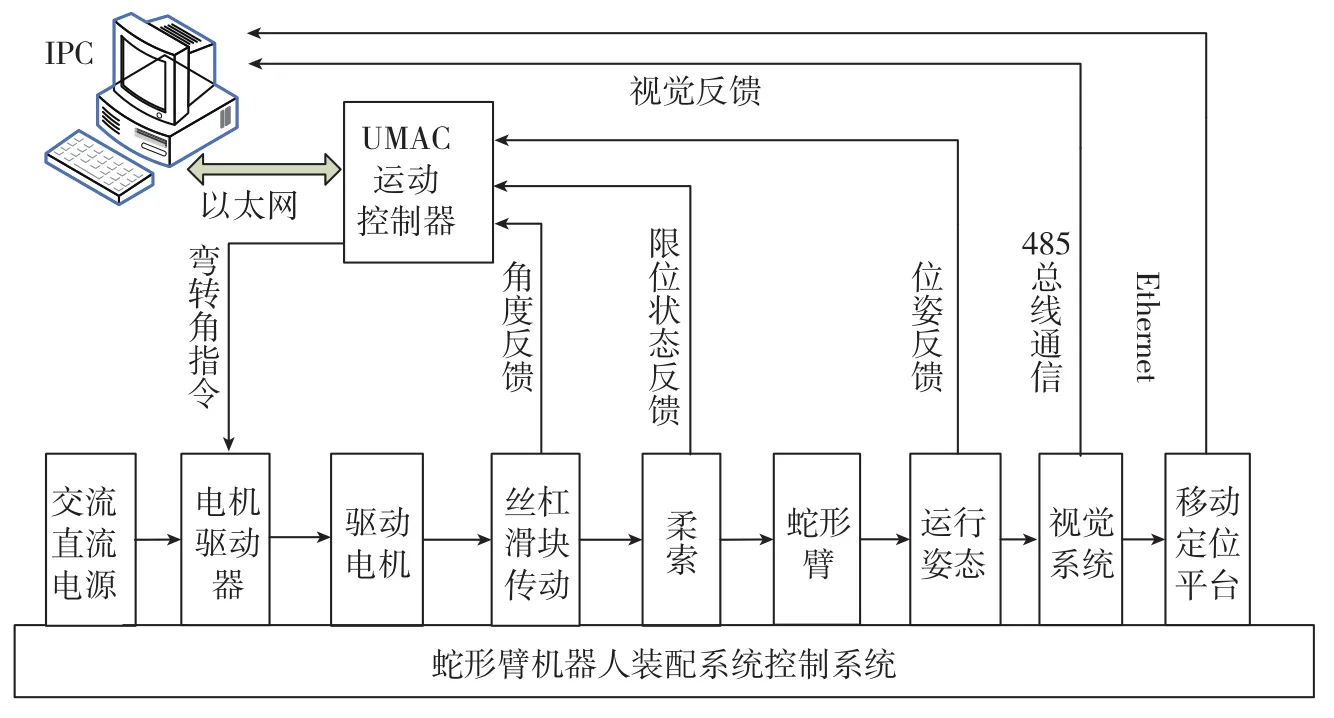
图10 控制系统总体方案
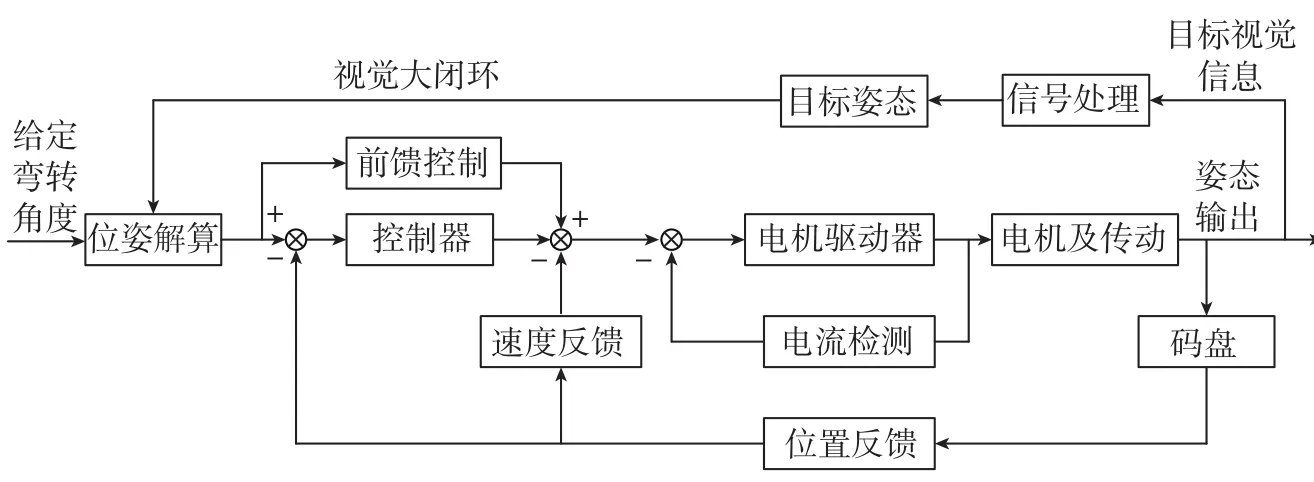
图11 控制系统原理框图
图10和图11分别为蛇形臂机器人装配系统控制系统总体方案和控制系统原理框图。IPC用于实现任务分配、后台管理调度和人机交互接口等功能,对蛇形臂、控制分系统、视觉分系统实现协调控制、指令发送、信息采集、状态监控等。同时,IPC是蛇形臂位姿指令的发送地和反馈信号的接收地,最终实现蛇形臂位姿伺服控制和反馈信号的存储;UMAC控制器可通过内部PLC程序实现控制面板操作与管理、功能选择与控制等,并通过I/O卡采集(或发送)各类信号,并充分发挥其内部资源,对信号进行隔离、滤波、调理等处理。
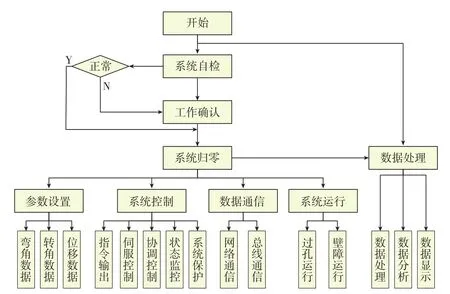
图12 软件系统功能模块及工作流程示意图
2 软件设计与实现
控制系统的软件设计是整个控制系统核心的部分,蛇形臂机器人装配系统的软件系统功能模块及工作流程如图12所示,软件系统主要包括参数设置、系统管理、数据通信、系统运行以及状态监控5大模块。
试验验证
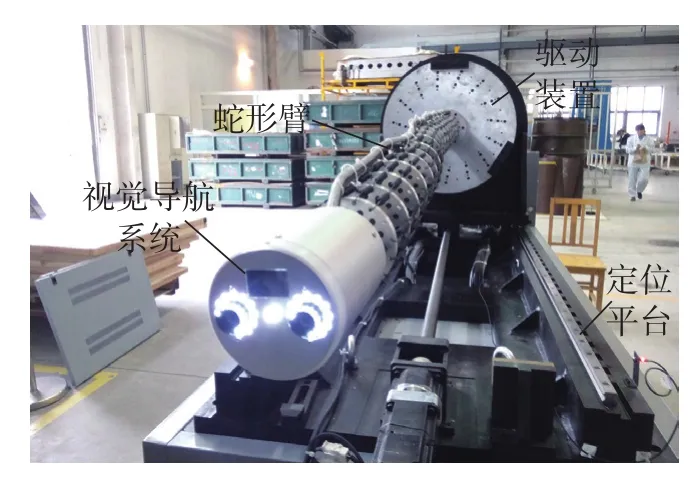
图13 蛇形臂机器人系统
针对飞机复杂狭窄内腔装配需求,研发了一套蛇形臂机器人装配(见图13)。该系统主要包括蛇形臂机器人、视觉导航系统以及移动定位平台。蛇形臂的质量为5kg,直径为90mm,长度为1500mm。
1 蛇形臂运动性能试验
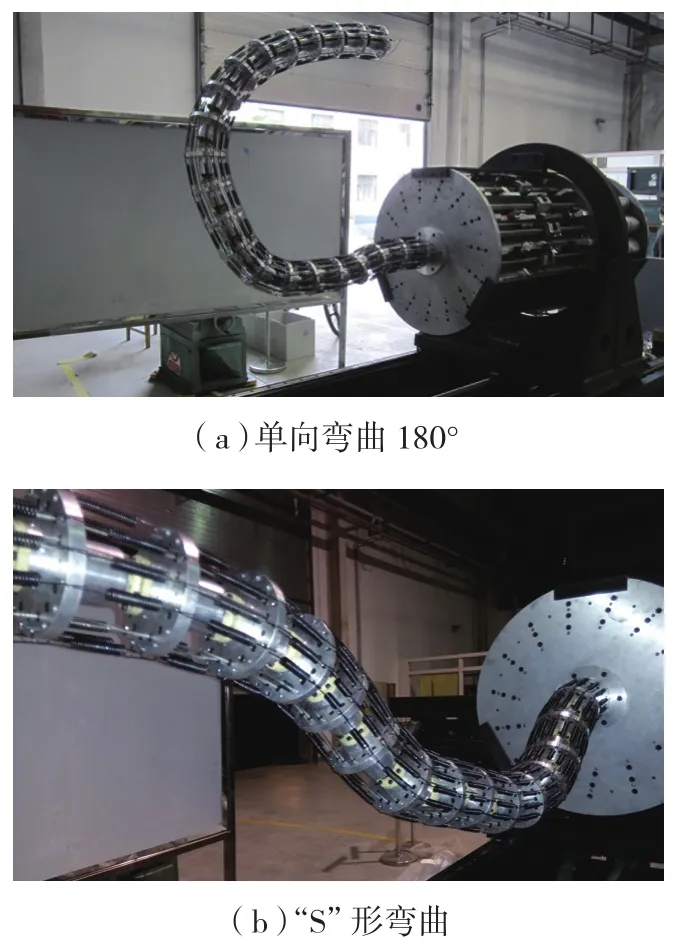
图14 蛇形臂运动性能试验
对蛇形臂的运动性能进行测试,如图14所示。试验结果表明,蛇形臂最大转动角度大于180°,外形可以灵活改变,可以实现预期动作。
2 狭窄空间避障运动试验
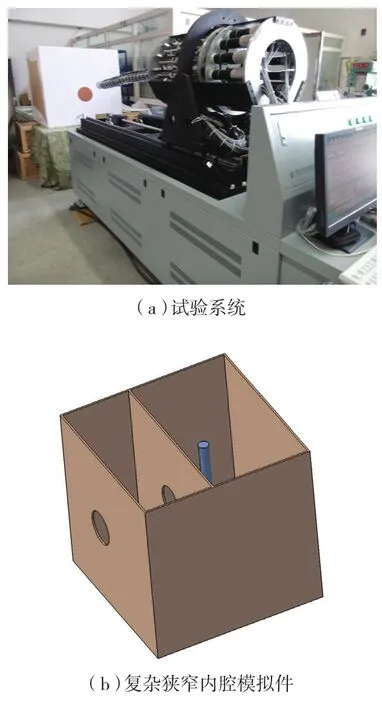
图15 避障运动试验系统
搭建如图15所示的避障运动试验系统,验证蛇形臂机器人装配系统的视觉导航和避障运动能力。验证环境为1000mm×1000mm×1000mm的立方体空间,立方体前板开孔用于穿过蛇形臂,立方体空间布置活动的挡板和圆柱体等障碍物。
图16为避障试验现场。试验结果显示,蛇形臂机器人系统运动稳定, 蛇形臂机器人能够在视觉系统的导引下实现自主避障运动。
结束语
本文总结出蛇形臂机器人装配系统总体架构,提出了一种蛇形臂仿生结构设计方法,设计并分析了蛇形臂机器人装配系统的视觉导航系统和控制系统。最后研制出一套蛇形臂机器人装配系统样机并进行了试验分析与验证。试验结果表明,蛇形臂最大转动角度大于180°,外形可以灵活改变,能够检测出障碍物并实现自主避障,进而验证了本文所提出的方法及系统合理性。
[1] PIERRE E. Dupont, JESSE Lock.design and control of concentric-tube robots.IEEE Transactions On Robotics, April 2010,26(2):209-225.
[2] JESSE L, GENEVIEVE L. Quasi static modeling of concentric tube robots with external loads. The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems,Taipei, China, 2010:2325-2332.
[3] MICHAEL W H, IAN D W. Kinematics and the implementation of an elephant's trunk manipulator and other continuum style robots.Journal of Robotic Systems, 2003, 20(2): 45-63.
[4] OC Robotics company. OC robotics applications & solutions[EB/OL].[2015-10].http://www.ocrobotics.com/applications--solutions/aerospace/.
[5] HU H, WANG P F, ZHAO B, et al.Design of a novel snake-like robotic colonscope.Proceedings of the 2009 IEEE International Conference on Robotics and Biomimetics.Guilin,China. December 2009:1957-1961.
[6] Kousuke Inoue, Kaita Nakamura,Masatoshi Suzuki, et al. Biological system models reproducing snakes' musculoskeletal system.The 2010 IEEE/RSJ International Conference on Intelligent Robots and Systems, Taipei, China 2010:2383-2388.