五电平逆变器直接转矩控制算法改进
2015-04-07杜东泉韩如成罗方利陈鹏洪
杜东泉,韩如成,罗方利,陈鹏洪
(1.太原科技大学 电子信息工程学院,太原 030024;2.92325部队,山西 大同 037036)
五电平逆变器直接转矩控制算法改进
杜东泉1,韩如成1,罗方利1,陈鹏洪2
(1.太原科技大学 电子信息工程学院,太原 030024;2.92325部队,山西 大同 037036)
针对磁链和转矩双闭环控制的直接转矩控制系统在获得所需电压空间矢量时需要复杂的坐标变换,本文构建了级联型五电平逆变器异步电机直接转矩系统,提出了一种改进的获取电压空间矢量的方法,直接在αβ坐标系下对磁链和转矩进行调节,该方法能够有效减小磁链和转矩脉动,并且能够减小计算机实时的计算量。在Matlab/Simulink软件平台上搭建了级联型五电平逆变器异步电机直接转矩控制系统模型,采用60°坐标系下的SVPWM调制算法,对改进的快速获取电压矢量的方法进行验证,仿真表明,该算法在减少计算机工作量的同时,获得了较好的磁链轨迹和转矩响应曲线。
直接转矩控制;五电平逆变器;坐标变换;计算量;60°坐标系
高性能的交流电机调速主要有矢量控制和直接转矩控制[1]。传统直接转矩控制存在转矩脉动大、开关频率不固定和定子电流谐波大等缺点[2]。为了保持逆变器开关频率固定,减小电机转矩脉动,有学者提出了直接转矩系统中摒弃滞环比较器,而采用基于磁链和转矩的闭环控制。文献[3-6]将磁链和转矩双闭环调节与三电平逆变器相结合,采用SVPWM加以控制,取得了比较好的效果。
多电平逆变器的出现是为了使用低耐压等级开关器件实现高压大功率输出[7];而且其具有输出谐波含量低、开关应力小等特点,在中高压变频器和有源滤波器等方面有广泛的应用,具有很高的实用价值。多电平逆变器的拓扑结构从大的方面主要可以分为钳位式拓扑结构和级联式拓扑结构,两种拓扑结构差别较大,因此它们构成的逆变器具有各自不同的特点。对于级联式多电平逆变器虽然有需要多个直流电源供电的缺点,但是其不存在类似于钳位式多电平逆变器的均压问题,而且具有元器件少、控制简单以及容易实现模块化的优点,因而也得到了广泛的应用。
将级联型逆变器应用到直接转矩系统中,利用空间矢量调制算法,可以有效改善直接转矩系统中磁链、转矩脉动大的问题。本文以五电平逆变器供电的异步电机作为研究对象,建立基于磁链与转矩调节的双闭环直接转矩系统,在60°坐标系下完成SVPWM算法的调制;提出一种简化的获取电压空间矢量的方法,搭建了系统的仿真模型,验证了这种在αβ坐标下快速获取电压空间矢量方法的正确性和有效性。
1 直接转矩控制系统
传统的直接转矩控制系统中,因为滞环比较器和矢量开关表的使用,一个开关周期只能发出一个电压空间矢量,不能在一个周期中准确地对磁链和转矩进行补偿,存在着开关频率不固定、转矩脉动大和定子电流谐波大等缺点[2]。本文采用磁链和转矩的双闭环控制,并应用本文提出的快速获取所需施加电压空间矢量的方法,以达到改进磁链轨迹,减小输出脉动,以及减小计算量的目的。
图1给出了控制原理框图。系统主要模块由三相异步电动机,级联型五电平逆变器,定子磁链和电磁转矩观测器,转速、转矩和磁链的三个PI调节器等组成;系统中,ωref为转速给定值,ψref为磁链给定值,电磁转矩的给定值可以由转速观测器得来;定子磁链和转矩观测器与传统DTC系统相同,磁链和转矩给定值与观测值做差后,通过磁链和转矩调节器,输入到电压矢量计算模块,进行空间矢量调制得到驱动电机运行的PWM信号,使得电机运行在平稳状态下。
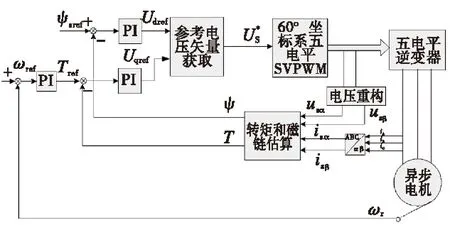
图1 五电平异步电机直接转矩控制系统结构框图Fig.1 The block diagram of five-level DTC system of induction motor
2 级联型五电平逆变器拓扑结构及坐标变换
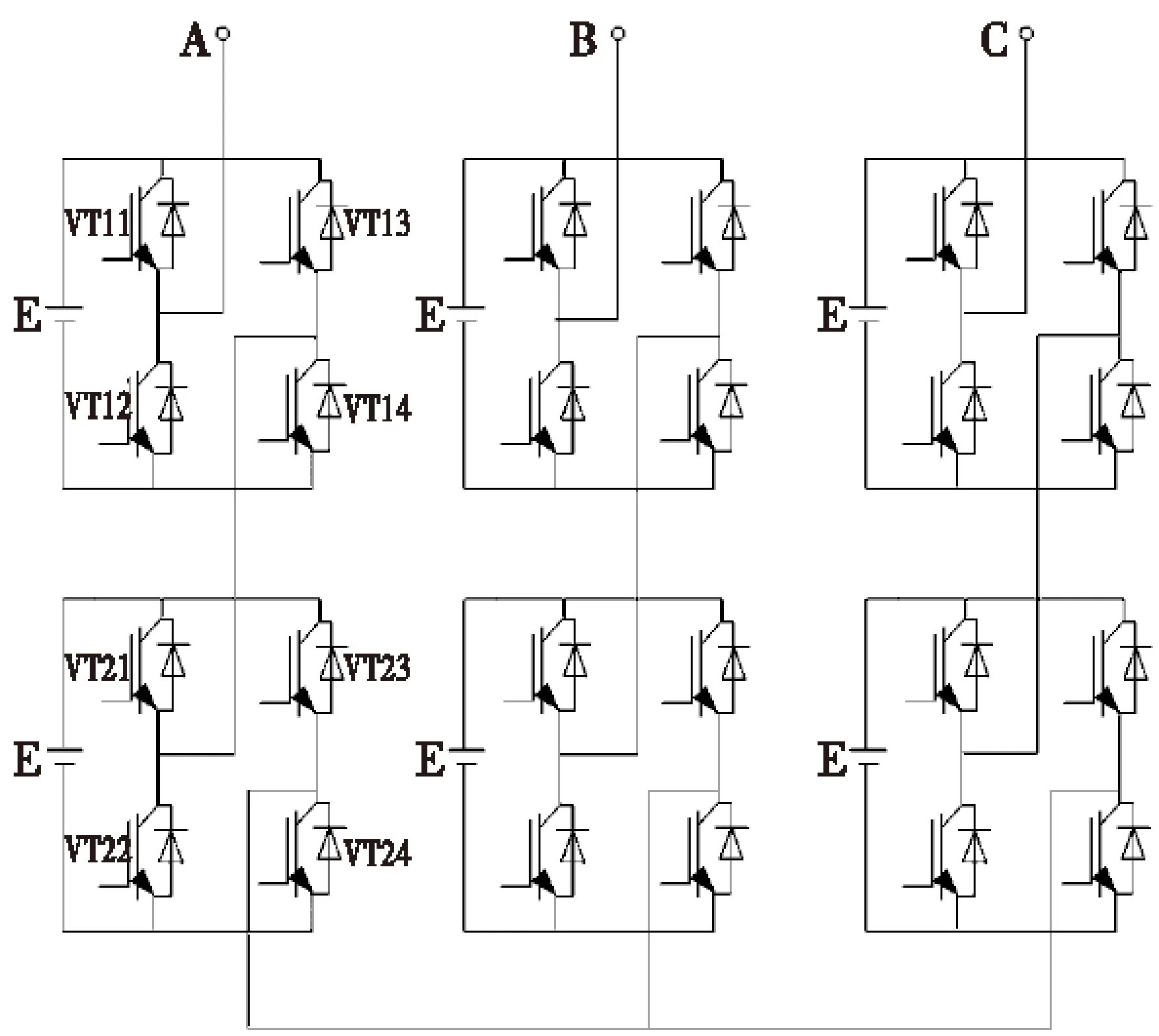
图2 级联型五电平逆变器拓扑结构
Fig.2 The main circuit topology of cascaded five-level inverter
图2为级联型五电平逆变器的拓扑结构,其中每相串联N=2个H桥单元,每个H桥单元可以输出的电压为E,0,-E;逆变器每一相可以输出的电压为:-2E,-E,0,E,2E,逆变器三相共输出53=125种电压空间矢量。
定义逆变器输出电压的空间矢量为us,则有:
(1)
式中:a=ej2π/3;a2=ej4π/3;
usa,usb,usc——逆变器输出的三相相电压;
usα,usβ——在αβ两相静止坐标系下α轴与β轴分量。
利用三相静止坐标系ABC到两相静止坐标系αβ下的坐标变换公式(式(2)),在αβ坐标下建立五电平逆变器的电压空间矢量,如图3.多电平逆变器具有大量的冗余矢量,冗余矢量的存在有助于改善逆变器的输出,但其增加了调制算法的难度。
(2)
在αβ坐标系中进行SVPWM调制,各个矢量的合成和作用时间的计算过程中,需要对三角函数进行大量的运算,计算机计算时需要耗费大量的时间,不利于在线计算。
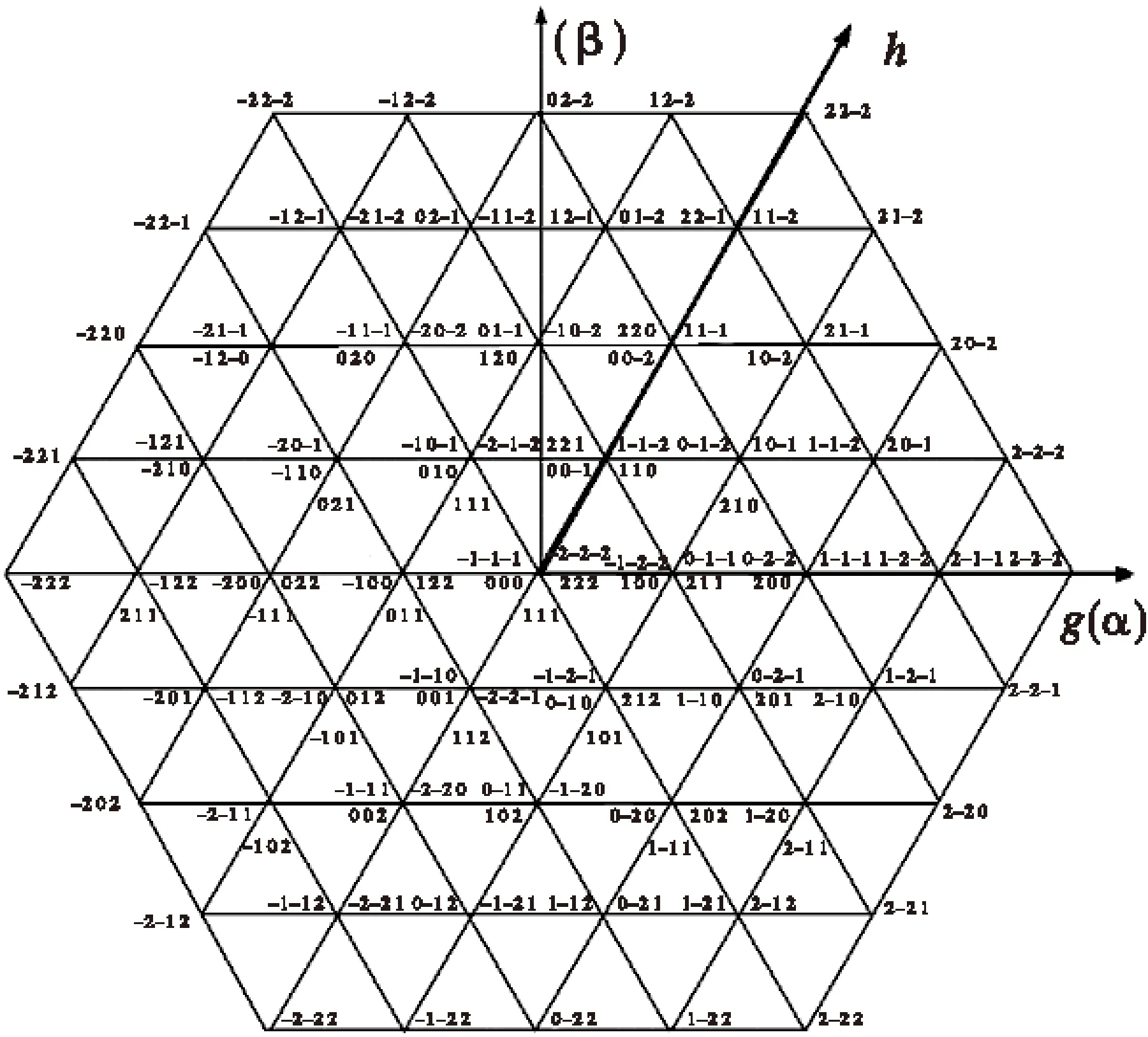
图3 在非正交坐标下的空间电压矢量图Fig.3 Space vector diagram under coordinate system for five-level inverter
考虑到图3中的六边形是由48个正三角形组成,因此在60°坐标系下可以简化矢量合成和作用时间的计算。式(3)给出了从两相静止αβ坐标系到非正交60°坐标系的坐标变换公式。
(3)

3 获取电压空间矢量的简化运算
直接转矩控制直接在静止坐标系中构建转矩和磁链的数学模型,对其磁链和转矩进行调节从而完成对电机性能的控制。感应电动机在αβ两相静止坐标系下的电压方程和转矩方程可以表示为:
(4)
(5)
(6)
(7)
定子磁链旋转坐标系dq中感应电机定子绕组端的电压方程为:
(8)
式中:p为微分算子。
转矩方程:
Te=1.5npψsisq
(9)
式中:ωs——定子电压角频率
(10)
式中:ωr——电机转速;
R——电机的转子电阻。
磁链模型可以表示为:
(11)
由式(8)-式(10)可以推导出:
(12)
(13)
从式(12)和式(13)可以看出转矩和定子磁链分别受dq坐标系上定子电压矢量分量usd和usq控制。分别改变定子电压分量usd和usq,可以对电机的定子磁链幅值和电磁转矩进行调节。
传统的基于转矩和磁链双闭环控制的直接转矩系统是在dq坐标系下获得udref和uqref定子电压指令值,而后需要将得到udref和uqref经dq/αβ坐标变换在αβ坐标下得到所需的电压矢量uαref和uβref.其中,dq/αβ坐标变换可以表示如下:
(14)
从变换矩阵中可以看出,dq/αβ坐标变换中涉及到大量的三角函数运算,在实时的在线计算中计算机处理三角函数运算需要占用较长的时间,从而影响系统的性能。文献[9]提出基于转矩角的直接转矩控制中,虽然也是在αβ坐标下直接获取电压空间矢量,但在计算转矩角时,仍然涉及到了三角函数的计算。本文介绍一种在αβ坐标系下快速获得udref和uqref定子电压指令值的方法,然后在60°坐标系下的五电平逆变器中获得相应的电压矢量及开关状态,可以避免引入三角函数,简化计算机的计算量,有利于实时的在线计算。如图4建立了某一时刻转矩和磁链调节器的原理图,首先介绍对磁链的调节。

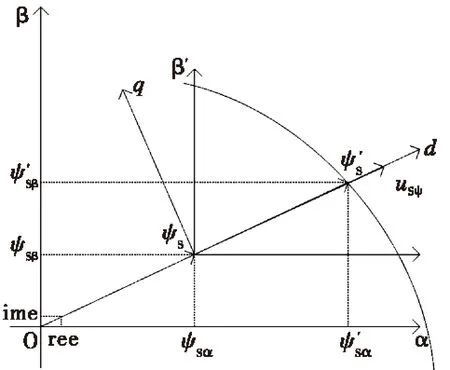
图4 坐标下对磁链的调节Fig.4 The regulation of flux on coordinate

从图中得到如下关系式:
(15)
(16)
通过平行四边形法则,便能得到改变磁链幅值的电压指令信usψ的值。

4 实验结果分析
为验证本文提出的基于磁链和转矩双闭环的级联型五电平逆变器异步电机直接转矩控制系统改进算法的正确性和有效性,在Matlab/Simulink环境下与传统直接转矩系统进行了对比。
依据图1所示的DTC框图,建立了五电平供电的直接转矩系统。五电平逆变器每单元由100V的直流电源供电,传统的直接转矩系统直流母线电压为510V,所采用的异步电机参数相同,额定功率3.7kW,额定线电压为380V,额定频率50Hz,定子电阻1.115Ω,定子漏电感0.005 974H,转子电阻1.083Ω,转子漏电感0.005 974H,互感0.203 7H,转动惯量0.02J(kg·m2),极对数2.
仿真时间设置为1s,给定磁链ψsref为0.9 Wb,在仿真开始给定转速为1 450 r/min,负载转矩为5 N/m,在t=0.2 s增加负载转矩至10 N/m,t=0.4 s减小负载转矩至5 N/m,0~0.6 s转速给定恒定,以观察负载转矩变化时的转矩响应速度,在0.6 s减小转速给定至800 r/min,0.8 s转速给定增至1 450 r/min,0.6 s~1 s负载转矩恒定,以观察转速给定变化时的转速响应。仿真结果如图5-图9所示。
图5为磁链轨迹的对比图,磁链幅值均为0.9 Wb,改进的磁链轨迹具有更小的磁链脉动,轨迹更趋向于圆形。
图6为五电平逆变器输出的相电压和线电压,其中相电压共有5个电平,分别为200,100,0,-100,-200;线电压共有9个电平。
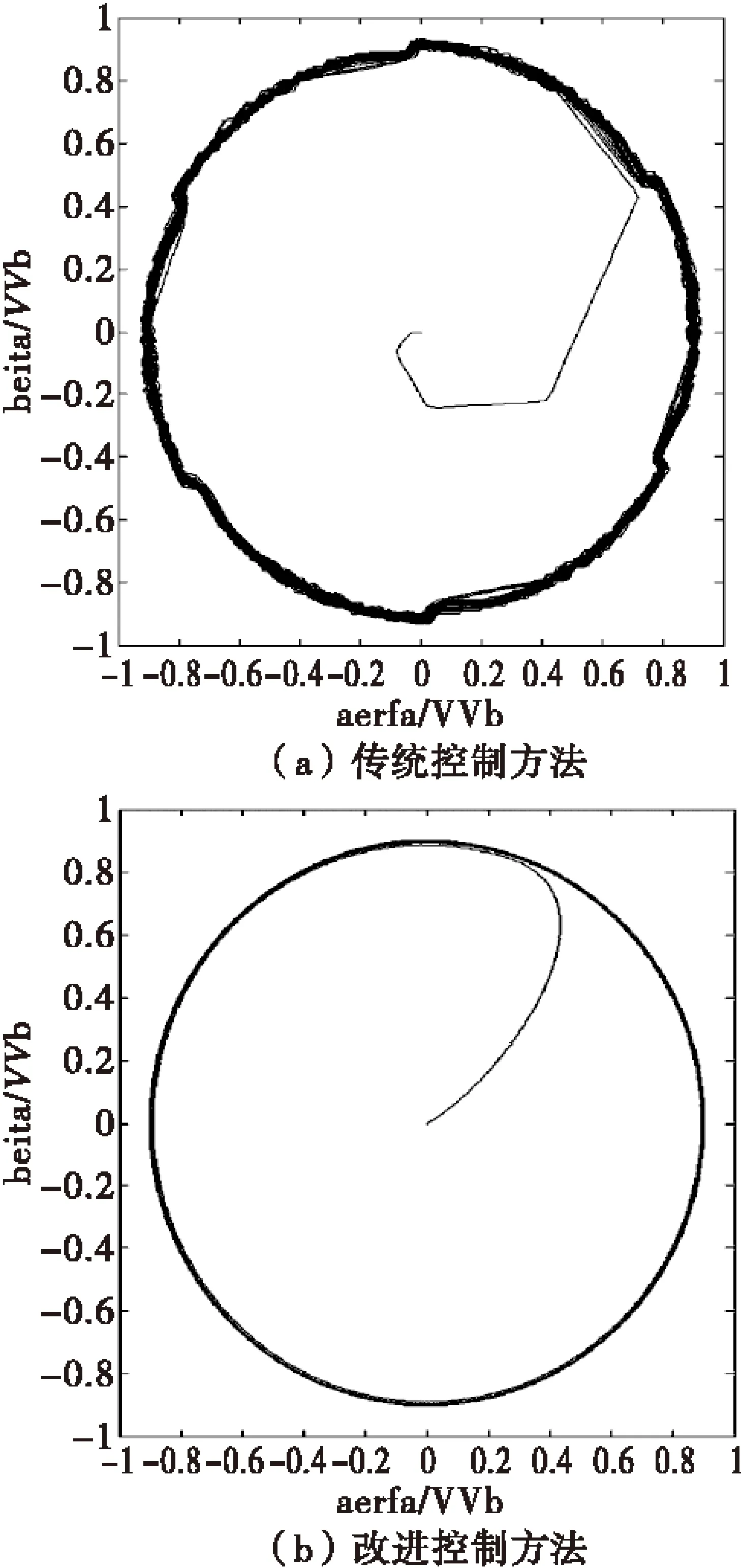
图5 定子磁链轨迹Fig.5 Stator flux linkage waveform
图7为转矩响应的对比图,在0.2 s增加负载转矩,电磁转矩增加;0.4 s减小负载转矩,电磁转矩减小;在0.6 s减小给定转速,电磁转矩为负值,以达到快速减小转速的目的;在0.8 s增加给定转速,电磁转矩迅速增加以提高转速。传统方法的转矩脉动为2.5 N/m,改进方法的转矩脉动为0.1 N/m,改进的控制方法转矩响应更快,转矩脉动更小。
图8为转速响应的对比图,从图中可以看出,在0.2 s和0.4 s负载转矩变化时,传统控制方法的转速波动较大;改进的控制方法的转速没有较大的波动,具有较强的鲁棒性,而且响应速度更快,运行更加稳定。
图9为A相电流的仿真波形,从图中看传统控制方法的启动电流较大,而且电流脉动也大,这样谐波含量便会较大,增加电机的发热,损害电机绝缘;改进的控制方法启动电流有所降低,而且电流波形更加平滑,有利于电机的正常运行。
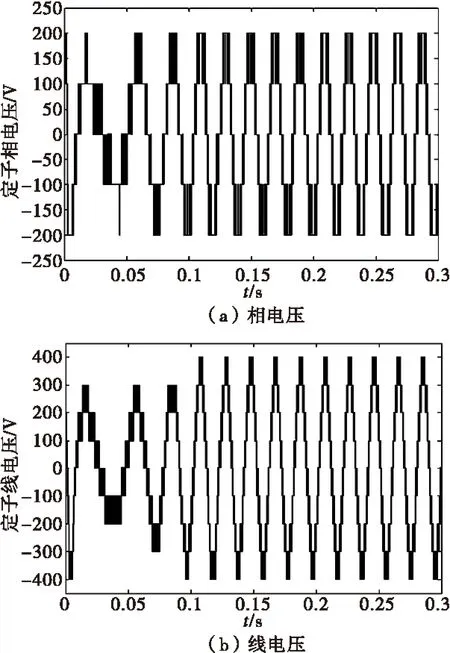
图6 相电压与线电压的仿真波形Fig.6 The simulation waveform of phase voltage and line voltage
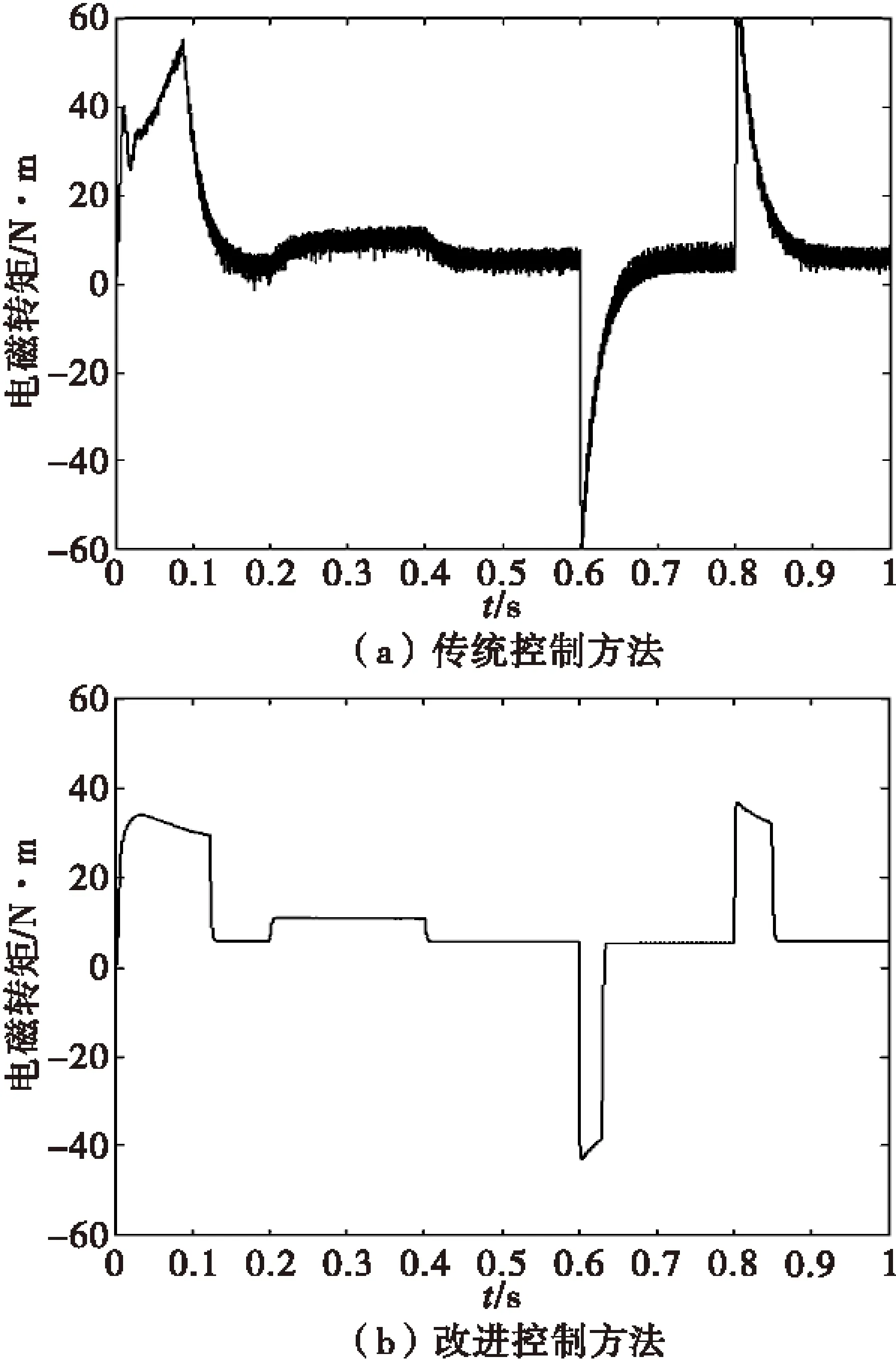
图7 转矩仿真波形Fig.7 The simulation waveform of torque
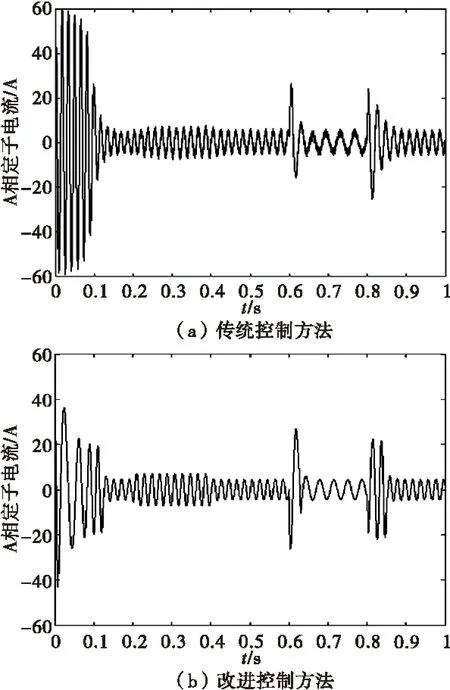
图9 A相电流仿真波形Fig.9 The simulation waveform of A-phase current
5 结论
介绍了一种改进的获取电压空间矢量的方法,直接在αβ坐标系下对磁链和转矩进行调节,省去了复杂的坐标变换和大量三角函数运算,从而减少了计算机实时计算时的计算量;结合级联型五电平逆变器组成了五电平逆变器直接转矩系统。从仿真结果上看,转矩脉动小,转矩响应快,磁链轨迹更接近圆形,逆变器输出的波形更接近正弦波。
[1] 周杨忠,胡育文.交流电动机直接转矩控制[M].北京:机械工业出版社,2009.
[2] BUJA G S,KAZMIERKOWSKI M P.Direct torque control of PWM inverter-fed AC motors-a survey[J].IEEE Transactions on Industry Applications,2004,51(4):744-757.
[3] 宋文胜,冯晓云,侯黎明,等.电力牵引传动系统的三电平直接转矩控制算法的半实物实验研究[J].电工技术学报,2012(2):165-172.
[4] 刘岩,王旭,邢岩,等.一种改进式无刷双馈电机三电平直接转矩控制算法[J].东北大学学报:自然科学版,2014(1):15-19.
[5] 刘述喜,王明渝.基于快速空间矢量调制算法的三电平直接转矩预测控制系统[J].电工技术学报,2009(2):35-41.
[6] 王明渝,邓威,陈扬裕,等.快速虚拟矢量调制的三电平直接转矩预测控制[J].重庆大学学报,2010(9):41-46.
[7] 刘凤君.多电平逆变技术及其应用[M].北京:机械工业出版社,2007.
[8] 罗方利,韩如成,李宁.五电平逆变器空间矢量调制算法的简化研究[J].云南民族大学学报:自然科学版,2014(3):227-231.
[9] 邱鑫,黄文新,杨 建飞,等,一种基于转矩角的永磁同步电机直接转矩控制[J].电工技术学报,2013(3):56-62.
[10] 兖文宇,于少娟,郭志坚.SPWM逆变器复合控制策略研究[J].太原科技大学学报,2013,34(6):410-414.
An Improved Five-level Inverter Direct Torque Control
DU Dong-quan1,HAN Ru-cheng1,LUO Fang-li1,CHEN Peng-hong2
(1.School of Electronic Information Engineering,Taiyuan University of Science and Technology,Taiyuan 030024,China;2.Unit 92325 of PLA,Shanxi Datong 037036,China)
This paper presents a five-level cascade inverter direct torque control system for asynchronous AC motor.A new method for selecting voltage vector is purposed.By the application of this new method,the torque and flux linkage of motor can be adjusted in αβ coordinate frame directly.Thus,the ripple of torque and flux linkage can be reduced obviously,and the calculation of Matlab can be decreased.A model of five-level cascade inverter direct torque control system is constructed for simulation in the Matlab/Simulink.A space vector pulse width modulation (SVPWM)algorithm under 60° coordinate frame is applied in the model to verify the new method.The results of simulation show that the application of this method can reduce the workload of Matlab.Additionally,better torque response and trajectory of flux can be got.
direct torque control,five-level inverter,coordinate transformation,workload,60° coordinate frame
1673-2057(2015)01-0012-06
2014-05-27
杜东泉(1990-),男,硕士研究生,主要研究方向为现代交直流电机调速;通讯作者:韩如成,教授,E-mail:ruchen959@126.com
TM921.2
A
10.3969/j.issn.1673-2057.2015.01.003
