一种基于IPMC的新型发电装置的 理论与实验研究
2015-02-16韩晨皓王田苗梁建宏
沈 奇,刘 淼,韩晨皓,王田苗,梁建宏
(北京航空航天大学 机器人研究所,北京 100191)
信息科学与工程
一种基于IPMC的新型发电装置的 理论与实验研究
沈 奇,刘 淼,韩晨皓,王田苗,梁建宏
(北京航空航天大学 机器人研究所,北京 100191)
IPMC是一种智能材料,可作为柔性驱动器/传感器使用。针对目前IPMC智能材料的机械电子特性,即IPMC被动产生一定的物理形变后会在其厚度方向上产生可观的微小电压的特性,设计了一种新型的基于IPMC智能材料的微型发电装置。该方法通过悬臂梁受力变形的原理设计了发电装置的结构,同时设计了一种新型的机械全桥整流法对IPMC产生的电流进行处理,通过这种整流法,可以对IPMC输出的电流进行无损耗的采集。最后采用LabVIEW软件,对所产生的电压信号进行检测。本设计具有结构简单、实现容易、携带方便、可随时随地发电等特点。
智能材料;IPMC;机械整流;便携发电
电活性聚合物(Electroactive Polymer,EAP)[1-2]是一种高效智能材料,具有特殊的电性能和机械性能。这类材料在电场作用下通过产生形状或体积的改变,实现电能和机械能之间的转化[3-4],广泛应用于机械、微机电、光电技术以及生命科学等领域[5]。由于电活性材料的独特性能,使得它们成为当今学术界的研究热点[6-7]。
离子交换聚合体金属合成物(Ion-exchange polymer-metal composites 简称IPMC)是一种离子型EAP,它以聚合物薄膜(通常为离子交换膜,如Nafion)为基体骨架,膜内浸透有金属离子,将贵金属(如Pt)颗粒通过化学镀的方式渗透并沉积在聚合物薄膜的上下表面形成金属电极[8-9]。
在90年代早期,日本与美国的两个小组分别研究发现了它的响应与传感性能。这些发现展示了IPMC具有良好的电—机械特性:当给IPMC薄膜施加较小的直流电压(如1~3 V),上下表面的金属镀层构成一对正负电极,IPMC薄膜向阳极发生弯曲变形,施加反向电压时,薄膜又弯向另一侧,其弯曲程度随着电压的增加而加剧,直至达到饱和状态,在正负交变电压作用下,能产生往复弯曲振动变形。相反,当IPMC受到弯曲变形时,具有电压效应,能输出电能,如图1[10]。利用这一结合了传感反应与执行响应的换能特性,可以设计构成许多智能结构,实现多种特殊应用[11-16]。
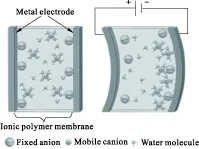
图1 IPMC工作原理
IPMC具有以下特点:
(1)寿命较长,响应速度快;
(2)体积小,质量轻;
(3)大范围运动却不需要轴承和滑动部件;
(4)低驱动电压;
(5)类似于生物肌肉比例恒定的特性(即尺度不变性,同样的尺寸产生的输出一样,而不同的尺寸产生的输出与其尺寸成比例),适用于微型装置;
(6)无噪声,环保;
(7)可以微型化发展。
本文提出了一种利用悬臂梁在端部施加一定外力产生变形的简单原理,配合IPMC特殊材料的设计思路,设计了一种可以安装于鞋底的便携式发电装置。走动过程中,脚部作用于弹簧使发电装置受鞋底和地面的挤压,IPMC悬臂梁一段受力弯曲时,IPMC会产生一个电信号;当脚部抬起时,弹簧反向弹起并超过平衡位置,这样会同时产生一个电信号;当行动过程中不断地使IPMC正向反向弯曲时,就会产生一系列的周期性的交流信号。通过一个特殊的机械式全桥簧片整流电路将其转化为直流电并储存在储能装置中。
1 IPMC悬臂梁的受力分析
1.1 悬臂梁的受力及位移关系
根据材料力学,当集中载荷作用在悬臂梁的一端时,悬臂将会产生一定挠度的弯曲,而挠度的大小则直接取决于作用的集中载荷的大小,如图2。

图2 悬臂梁受力形变图
挠曲度方程为:
(1)
在式(1)中ω为挠度(m),F为作用的集中力(N),x为集中载荷F作用点距离固定端点A的距离(m),E为弹性模量,I为极惯性矩,l为梁的长度。在整个实验中,默认IPMC梁在厚度和宽度方向质量均匀分配。因此就可以得到最大弯曲挠度式,即当集中载荷作用在端部时,挠度可以由下式得到:
(2)
1.2 悬臂梁功能的实现即力与位移的转换
在如下Solidworks建模的图3中,可以清楚看到一个IPMC悬臂梁。其左端被固定在透明壳中,右端被上下两个夹子夹紧。在行走过程中,图示右端的压钮在脚底与地面接触时会向下压动IPMC悬臂梁的右端,产生一个集中载荷,使其变形,完成力与位移的转化,抬脚时弹簧弹起超过平衡位置,产生反向的形变并输出电信号。
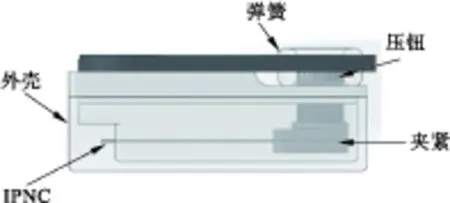
图3 Solidworks中对IPMC悬臂梁的建模
2 交流型号的获取和整流以及能量的转化
2.1 物理结构的设计
以IPMC材料的特性为依据,设计出了前文描述的满足运动时IPMC物理形变要求的装置结构,本节内容将阐述本发电装置中采集并存储IPMC形变时产生的电信号的结构。随着对智能材料的深入了解,越来越多的研究者掌握了多数智能材料的特性。近些年的研究表明,在利用智能材料产生能量的过程中,最大的困难就是低触发电压的情况对产生的电荷进行采集并转化为可以应用的能量。由于IPMC发生的形变量较小,产生的电压较小,这也就意味着常用于将周期电压转化为直流信号的半导体整流电路对于本发电装置的电信号转化是不适用的。鉴于这种情况,本文提出了一种新型的基于机械原理的全桥整流电路,其基本原理是通过永磁体与干簧管之间的配合,达到类似二极管组成整流电路。
具体的实现方法如图4的建模仿真图。
当行走过程中脚底与地面接触时,会将压钮按下,于是压钮上嵌入的4个干簧管将靠近下端的永磁体,产生相应的动作,并启动整流电路。
2.2 电信号采集电路的设计
因为放弃了使用半导体二极管设计整流电路,为了保持单通的特性,设计使用了两个常开干簧管和两个常闭的干簧管,分别嵌入在上图中压钮的两个槽内。全桥整流电路图按图5连接。图5中的1端连接在IPMC板的上表面,2端连接在IPMC的下表面。工作时,当压扭在IPMC端部施加压力并产生厚度方向电压时,电流从1通过接通的开关SW1流过电容C从闭合的开关SW4流出产生闭合回路。当抬脚时,由于小盒自身的重力会使两个压片相对向上施加集中载荷,产生反向电压,电流从左下的位置2通过开关SW3流入,与踩下时同向的向电容C充电之后流过开关SW1形成闭合回路,实现电荷的收集。当弹簧从最大压缩位回复至平衡位置的过程中,干簧管断开,采集的电荷不会回流。
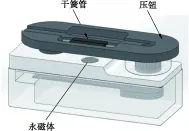
图4 机械全桥整流的结构实现
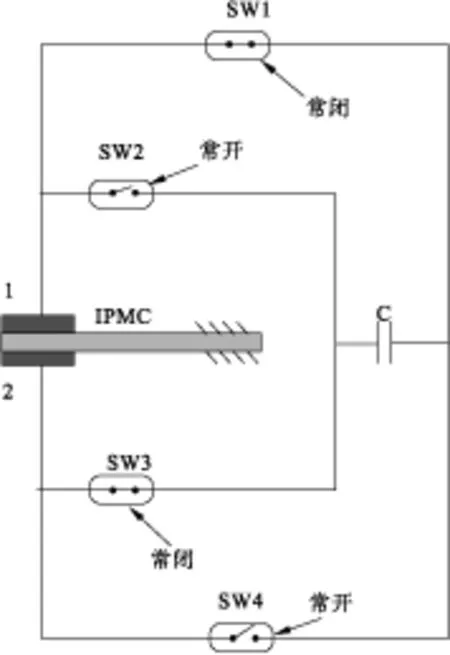
图5 机械法实现全桥整流的电路图
2.3 位移与电能之间的转化
根据前人的工作[17-18],对于三层结构的双压电晶片悬臂梁,当其一端固定,另一端产生一个位移时,其末端位移S和阻滞力Fb1可以用下式表示:
(3)
(4)
式(3)中,S为末端位移,即为前一节提到的挠度ωB,L为悬臂梁的长度,H为IPMC的厚度,a和b分别为三层结构的中间塑性层和外层的杨氏模量比和厚度比,E3为电场强度,且E3=V/H,V即为产生的电压。d31是机电耦合系数,因为是个常数,所以可以通过测量已知的电压和位移来确定。对本文所介绍的IPMC,由于不存在塑性中间层,因此杨氏模量比和厚度比都为0,即a=b=0。进而可以得到在厚度方向上产生的电压与位移的定量关系:
(5)
通过对式(5)进行变换,可以得到机电耦合系数:
(6)
由此建立了位移与产生电压之间的定量关系。随着不断的行走,将产生连续的周期性电压信号,在整流电路的作用下,将不断产生电能并储存。根据上述推论,可以得到力与电压之间的关系式:
(7)
3 IPMC特殊发电鞋实验测试验证
3.1 实验的设计
在进行了初步的理论分析之后,后续的实验方案按照如下的步骤进行,以验证理论的可行性:IPMC悬臂梁整体置于盛满去离子水的密闭容器中,两端都通过夹具固定,其中一端收到外界的激励并产生响应,同时该端夹具装有电极以采集IPMC形变时产生的电信号并通过前文描述的全桥整流电路得到直流信号,最终输入LabVIEW以进行定量分析,具体的实验方案按照图6进行。
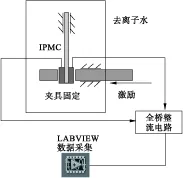
图6 测试系统总体框图
3.2 实体结构
为了对本装置输出的电信号进行定量分析,实验选取了相对容易进行结构修改的木屐作为实验用具;实验初步将木屐后端的横木通过钳工加工去除材料的一部分,之后将设计的发电装置嵌入在其中,并拉出引线,以测量相应的电信号,具体的实物图如图7所示。
3.3 实验验证
本实验中,发电鞋通过脚部踩踏引起IPMC发生形变,产生电信号。发电鞋由此可以充分利用在日常行走中产生的机械能。上述发电装置引出的两条线直接接入LabVIEW的采集卡中,打开LabVIEW进行模拟的数据采集,如图8所示。从图8中可以观察到刚开始处于较低位置的电信号是由于IPMC没有受到集中载荷的作用导致在厚度方向上并没有产生电压。
当开始在地面上行走时,在反复踩踏过程中,脚部通过小盒上的压钮不断地对IPMC悬臂梁施加向下的载荷,同时在抬脚的同时,夹具对IPMC施加反向的载荷,在整流电路的作用下呈现出连续的同方向(V > 0)的信号。图8中可以观察到所有波峰的峰值几乎相等,这是因为在下踩的过程中,当脚底与地面完全接触时,达到的IPMC形变的最大值是一定的。相反,每一个波谷并不一样是因为在抬脚的时候,由于小盒的重力带动固定装置使IPMC反向弯曲的力度不是固定的,所以会参差不齐。还可以观察到图中电信号采集的曲线斜率很大,这是由于踩踏过程相对短暂,IPMC悬臂梁的挠度瞬间达到峰值,所以测量的电信号也会在短时间内达到最大值。由前文可知IPMC悬臂梁的形变量和电压有着定量关系可解释上述现象。总的来说,信号产生,整流和获取都取得了很明显的效果。
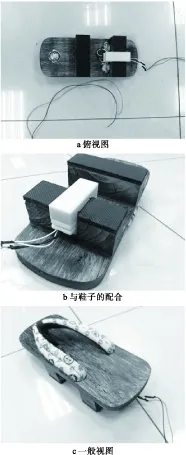
图7 发电鞋实体结构图

图8 LabVIEW 中的模拟信号采集
4 结论
(1)本文充分利用了IPMC机电特性——在一定的机械形变下会产生厚度方向的电压,设计了一种便携式发电装置。
(2)本文中利用了一种代替半导体二极管的机械式全桥整流并且获得了十分理想的效果。
(3)本文中所提出的便携式发电装置的可行性已经通过LabVIEW验证,但是并没有添加对储能元件的定量分析。
(4)在后续的研究中,会对储能方式进行进一步的分析,以提高本装置的实用性。
[1]Bao X,Bar-Cohen Y,Chang Z,et al.Characterization of bending EAP beam actuators[C]//Smart Structures and Materials.International Society for Optics and Photonics,2004:388-394.
[2]Bar-Cohen Y,Sherrit S,Lih S S.Characterization of the electromechanical properties of EAP materials[C]//SPIE's 8th Annual International Symposium on Smart Structures and Materials.International Society for Optics and Photonics,2001:319-327.
[3]党智敏,王岚,王海燕.新型智能材料:电活性聚合物的研究状况[J].功能材料,2005,36(7):981-987.
[4]韩福峰,王彦,刘立宏.基于 EAP 驱动器的并联式管道机器人机构设计[J].机械科学与技术,2006,25(2):214-216.
[5]李晓锋,梁松苗,李艳芳.仿生材料电活性聚合物 “人工肌肉” 的研究进展[J].高分子通报,2008(8):4.
[6]Shahinpoor M,Bar-Cohen Y,Simpson J O,et al.Ionic polymer-metal composites(IPMCs)as biomimetic sensors,actuators and artificial muscles-a review[J].Smart Materials and Structures,1998,7(6):R15.
[7]Shahinpoor M.Ionic polymer-conductor composites as biomimetic sensors,robotic actuators and artificial muscles—a review[J].Electrochimica Acta,2003,48(14):2343-2353.
[8]Shahinpoor M,Kim K J.Novel ionic polymer-metal composites equipped with physically loaded particulate electrodes as biomimetic sensors,actuators and artificial muscles[J].Sensors and Actuators A:Physical,2002,96(2):125-132.
[9]Kim K J,Shahinpoor M.A novel method of manufacturing three-dimensional ionic polymer-metal composites(IPMCs)biomimetic sensors,actuators and artificial muscles[J].Polymer,2002,43(3):797-802.
[10]Paquette J W,Kim K J.Ionomeric electroactive polymer artificial muscle for naval applications[J].,IEEE Journal of Oceanic Engineering,2004,29(3):729-737.
[11]Shen Q,Wang T M,Liang J H,et al.Hydrodynamic performance of a biomimetic robotic swimmer actuated by ionic polymer-metal composite[J].Smart Materials and Structures,2013,22(7):075035
[12]Wang T M,Shen Q,Wen L,et al.On the thrust performance of an ionic polymer-metal composite actuated robotic fish:Modeling and experimental investigation[J].Science China Technological Sciences,2012,55(12):3359-3369
[13]Shen Q,Wang T M,Wen L,et al.Modelling and fuzzy control of an efficient swimming ionic polymer-metal composite actuated robot[J].International Journal of Advanced Robotic Systems,2013,10(4):350
[14]Shen Q,Wang T,Wen L,et al.On the thrust efficiency of an IPMC actuated robotic swimmer:dynamic modeling and experimental investigation[C]//Proc.Int.O shore and Polar Engineering Conf.2012:556-62.
[15]Shen Q,Kim K J,Wang T.Electrode of ionic polymer-metal composite sensors:Modeling and experimental investigation[J].Journal of Applied Physics,2014,115(19):194902.
[16]Shen Q,Wang T,Wen L,et al.A novel method for investigating the kinematic effect on the hydrodynamics of robotic fish[C]//Robotics and Biomimetics(ROBIO),2013 IEEE International Conference on.IEEE,2013:1306-1311.
[17]Lee S,Park H C,Kim K J.Equivalent modeling for ionic polymer-metal composite actuators based on beam theories[J].Smart materials and structures,2005,14(6):1363.
[18]Wang Q M,Zhang Q,Xu B,et al.Nonlinear piezoelectric behavior of ceramic bending mode actuators under strong electric fields[J].Journal of Applied Physics,1999,86(6):3352-3360.
(责任编辑:吴萍 英文审校:宋晓英)
Theoretical and experimental study of a novel power generating device based on IPMC
SHEN Qi,LIU Miao,HAN Chen-hao,WANG Tian-miao,LIANG Jian-hong
(Robotic Institute,Beihang University,Beijing 100191,China)
IPMC is a kind of smart material promising for soft actuator/sensor.It has the mechano-electrical transaction properties.When subjected to deformation,IPMC can generate detective electrical signal.An innovative IPMC-based micro powergenerating device was developed by applying the cantilever deformation theory.A novel mechanical full bridge rectifier circuit was proposed to harvest the electrical signal generated by IPMC without any loss.The electrical signal generated in the experimental results was analyzed and processed by the LabVIEW.This design has a variety of advantages,such as simple structure,easy implement,convenience to carry and complete flexibility for time and spot.
smart material;Ion-exchange polymer-mental composite;mechanical rectifier;portable power generation
2015-01-05
国家自然科学基金(项目编号:61333016)
沈奇(1987-),男,浙江绍兴人,博士研究生,主要研究方向:智能材料及其在仿生机器人上应用研究,E-mail:eric_shen1987@163.com;王田苗(1960-),男,湖北武汉人,教授,主要研究方向:医用机器人研究、微小型机器人研究和嵌入式机电控制理论与方法,E-mail:wtm_itm@263.net。
2095-1248(2015)03-0042-05
TP24
A
10.3969/j.issn.2095-1248.2015.03.008
