油电混合动力飞机起飞爬升性能模拟
2015-02-16康桂文孙振祥
康桂文,孙振祥
(1.沈阳航空航天大学 航空航天工程学部(院),沈阳 110136;2.辽宁通用航空研究院 动力室,沈阳 110136)
民用航空与安全工程
油电混合动力飞机起飞爬升性能模拟
康桂文1,2,孙振祥1
(1.沈阳航空航天大学 航空航天工程学部(院),沈阳 110136;2.辽宁通用航空研究院 动力室,沈阳 110136)
在某通用飞机的基础上改装设计了一个混合动力系统,并通过MATLAB软件模拟该混合动力飞机的起飞爬升性能。根据飞机空气动力学公式、飞机阻力及海拔高度等外界环境的影响,将飞机起飞爬升看成定常过程,通过编程对原型机和混合动力机起飞爬升性能进行模拟。结果表明,混合动力飞机滑跑距离和爬升率性能都比原型机好,在海拔较高的地区尤为明显。
混合动力;通用飞机;爬升率;滑跑距离;MATLAB
在通用航空领域,用发动机作为动力源是目前通用飞机的首要选择,对于超轻型飞机,活塞式发动机则是最佳选择。但是由于能源问题逐渐凸显,发动机造成的污染也越来越严重。现在已有许多专家致力于电动飞机的研究,遗憾的是目前电池技术不够成熟,电池能量密度太小,还不适合用于飞机上[1],所以电动飞机至今发展缓慢。而此时,汽车领域油电混合动力系统的研究取得了较大进展[3],油电混合动力系统大大减少了发动机油耗和污染排放[2],给飞机设计者们提供了丰富经验,混合动力飞机因此而诞生[4]。
1 混合动力飞机总体设计方案
加拿大DA20-C1双座飞机是目前世界上比较流行的一款轻型双座运动飞机[5],适用于飞行训练及空中旅游等多项任务,技术比较成熟,其动力装置是一台Continental IO-240-B航空活塞发动机。本文以这款飞机为原型机,机身保持不变,通过动力学公式计算,选择合适的电动机和发动机组合。综合考虑飞机平飞时所需最小功率[6],发动机性能和尺寸大小,电机功率、性能和尺寸[7]等参数,最终选择100 Hp的ROTAX912ULS发动机和斯洛文尼亚生产的最大持续功率为30 kW的EMRAX207电机,采取并联方式连接。本文采用空中不充电方案,要求发电机只在起飞滑跑和爬升过程中使用,根据原型机实用升限,计算的电池电量约为7.32 kW·h,飞机动力源主要参数如表1所示。发动机、电机以及电池总重与原发动机相近,且总体尺寸较小,可以在不改变飞机外形的情况下进行改装。
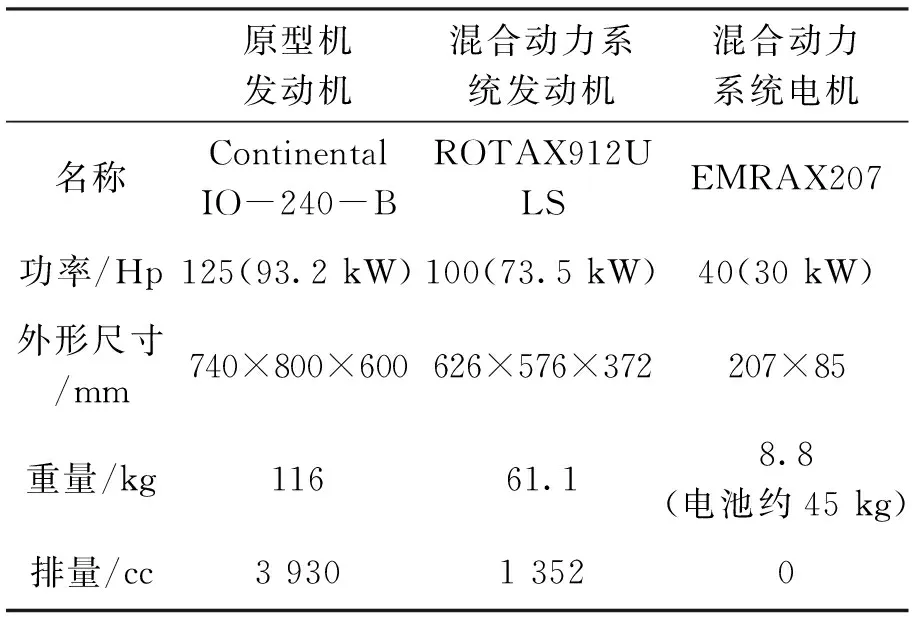
表1 飞机动力源参数对比
混合动力系统如图1所示,主要部件包括发动机、电动机、电池、螺旋桨以及传送带。电动机和发电机通过传送带与发动机主轴相连,并通过皮带实现电机工作或不工作选择。同时,为了不改变飞机的重心,将混合动力系统发动机、电机及电池紧密排列,并固定在原发动机的部位。
根据要求,本文设计了两种工作方案。一种是Hybrid-electric1方案,发动机以100 hp功率,电机以40 hp功率滑跑,传送带轮传动比为1.08:1,该方案有较大的推力;另一种是Hybrid-electric2方案,发动机以75 hp功率,电机以40 hp功率滑跑和爬升,传送带轮传动比为1.32:1,该方案经济性较好。
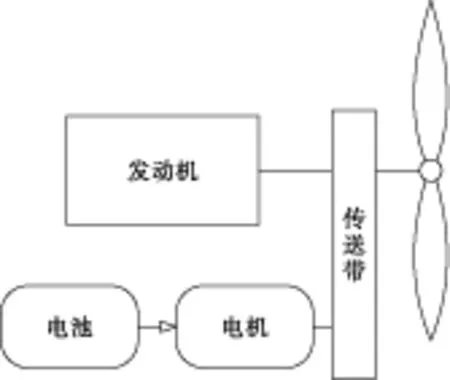
图1 混合动力系统设计图
2 飞机起飞爬升性能模拟
对于轻型运动飞机而言,起飞滑跑时所用功率一般为发动机的最大功率,而爬升时则是0.9倍的发动机最大功率[8]。滑跑时飞机受到的力包括螺旋桨向前的平均拉力FT,空气的阻力FD、地面的摩擦力Ff、向上的升力FL以及飞机自身的重力G。抬前轮前后两端飞机所处的姿态不同,因而迎角以及升、阻力系数也不同,所以滑跑段的精确计算为对两端进行数值积分后相加,但是实践表明为近似计算,可以假设飞机在整个滑跑过程中都以两主轮着地,而发动机拉力与地面平行[8]。
非增压活塞发动机功率随高度变化的近似估算公式[9]为:
(1)
式中,N为发动机功率,单位Hp;P,T为大气压和大气温度,下标“0”和“H”分别代表海平面状态和工作高度H处的状态。螺旋桨地面拉力[10]为:
(2)
FT=0.9F0
(3)
式中,D为螺旋桨直径,单位ft;FT为滑跑阶段的平均拉力,单位kg。海拔高度5 000 m以下大气密度随高度H的变化规律为[11]:
(4)
ρ0=1.225 0 kg/m3
(5)
地面滑跑时的平均阻力[12]为:
(6)
G为飞机自身重力,f为地面摩擦系数,Kld为飞机离地时的升阻比。滑跑时平均加速度为:
(7)
起飞滑跑距离为:
(8)
式中,Vld为飞机的离地速度。假设飞机在整个滑跑过程中都以两主轮着地,而发动机拉力与地面平行[8],这样飞机的滑跑过程可以视为匀加速过程,受力分析如图2所示。

图2 飞机滑跑时受力分析
综合以上计算进行受力分析,假定机场温度为25℃且温度随高度变化均匀,利用MATLAB编程计算可得原型机和混合动力机滑跑距离随机场高度的变化关系,如图3所示。
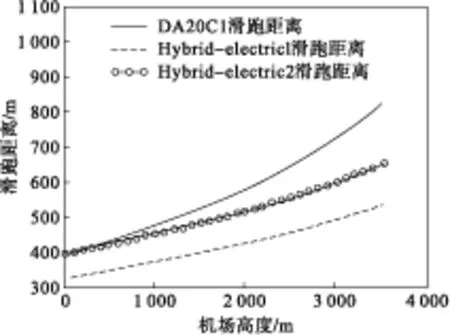
图3 滑跑距离和机场高度的关系
由图3可以看出,钻石DA20-C1原型飞机的起飞滑跑距离随机场高度变化非常明显,在高海拔地区飞行时需要的跑道长度较长,而混合动力飞机受机场高度的影响非常小。在海拔1 000 m的机场起飞时,混合动力飞机Hybrid-electric1方的起飞距离比原型飞机缩短了21.4%,而在海拔3 000 m时则缩短了32%,特别适合于高原机场。与Hybrid-electric1方案相比,Hybrid-electric2方案的起飞滑跑距离变化较小,但是由于该方案发动机一直在经济范围运行,所以油耗量和排放都较低。
爬升过程中飞机受力为准静态,受力变化比较缓慢[8],本文将爬升过程视为定常爬升,即飞机所受阻力完全符合空气动力学性能,受力分析如图4所示。
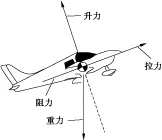
图4 飞机爬升时受力分析
爬升时发动机功率一般为发动机最大功率的90%,对于混合动力飞机Hybrid-electric1方案,发动机以功率90 hp、电动机以36 hp爬升;对于Hybrid-electric2方案,发动机以功率75 hp,电动机以40 hp爬升。爬升率计算公式[13]为:
(9)
螺旋桨空中拉力[14]为:
(10)
(11)
式中,Vclimb为飞机爬升率,V为飞机定常爬升速度,本文取为138.9 km/h;F为爬升时螺旋桨拉力,F0为螺旋桨地面拉,Ω为螺旋桨转速,D为螺旋桨直径,NH为发动机在海拔高度H处的功率,FD为飞机飞行时的阻力,CD为不同飞行姿态下的阻力系数。
综合以上力学公式及爬升时的受力分析,假定机场上空温度随高度变化均匀,利用MATLAB编程计算可得原型机及混合动力飞机两种工作方案爬升率随高度变化曲线,如图5所示。
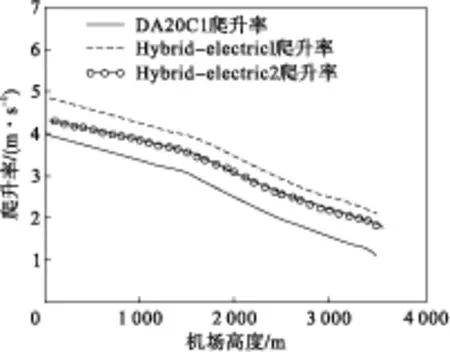
图5 爬升率与飞行高度的关系
由图5可以看出,Hybrid-electric1方案在海平面上的爬升率比原型机高21%,在海拔高度为1 000 m时比原型机高26.3%,Hybrid-electric2方案爬升率也有所增加。混合动力飞机和原型机的爬升率都随高度增加而下降,但是混合动力飞机爬升率在任何高度下都大于原型机,且受高度影响较小。
假定飞机任务高度为1 000 m,在海拔2 500 m以下机场起飞时,起飞滑跑至任务高度消耗的燃油量[15]为:
Q=Btake-off×Ttake-off+Bclimb×Tclimb
(11)
(12)
(13)
(14)
式中,Btake-off,Bclimb为滑跑和爬升时的燃油消耗量,b为燃油消耗率,N为发动机输出功率,d为燃油比重,Ttake-off,Tclimb分别为滑跑时间和爬升到任务高度的时间。
不同高度下,发动机功率及螺旋桨拉力不同,从而使得滑跑距离、滑跑时间、爬升率和爬升时间等随之改变,综合考虑外界环境对飞机的影响,计算的飞机爬升到任务高度的耗油量如图6所示。
对于单次总飞行时间不长而起落次数较多的训练机而言,起飞爬升过程的耗油量是衡量其性能的一个关键因素。由图4可知,在海平面机场起飞时,混合动力飞机两种方案的耗油量相近,为原型飞机的50%左右,而随着机场海拔高度增加,混合动力飞机的优势更加明显,在2 500 m高度机场起飞时,到达任务高度所需的耗油量仅为原型机的25%~30%。
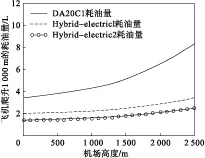
图6 飞机爬升到任务高度的耗油量
综合以上结果,混合动力飞机两种方案的总体起飞爬升性能均优于原型飞机,但两种工作方案各有优缺点,Hybrid-electric1方案发动机功率大,爬升率较大,油耗量和污染物排放增加;Hybrid-electric2方案发动机功率较小,爬升率较小,发动机油耗小。相对于原型飞机来讲,由于电机基本上不受高度影响,因此混合动力机受高度影响相对较小。
3 结束语
起飞爬升性能是通用飞机设计中的一个重要指标[16],其优越性在一定程度上决定通用飞机的市场。滑跑距离越短,对跑道的要求就会降低,更适用于教学训练以及旅游飞行等任务。爬升率大是飞机的另一大优势,可以使飞机在很短的时间内到达任务高度。混合动力飞机在满足平飞速度的前提下,提高了起飞爬升功率,从而大大提高飞机的起飞爬升性能。同时,由于电动机受高度、温度和大气密度等外界条件影响较小,在一定程度上提高了飞机对环境的适应性。此外对于教练机而言,飞机单次总飞行时间一般不会太长,主要注重训练起飞和降落,因此飞机起飞爬升过程的耗油量至关重要,混合动力系统在这方面的改进使得其在通用飞机领域有很好的应用价值。
[1]梁冰,王和平,袁昌盛.小型电动无人机动力系统设计和优化[J].航空计算技术,2010,40(6):78-80.
[2]吕胜利,左曙光.并联混合动力汽车控制策略的综合分析[J].上海汽车,2005(7):26-30.
[3]付健夫.不同工况下的混合动力汽车的整车性能研究[D].哈尔滨:哈尔滨工业大学,2007.
[4]Richard R G.Multimodal hybrid powerplant for unmanned aerial systems(UAS)robotics.Australasian Conference on TRoboticsand Automation,Brisbane:Australia,2008.
[5]Rippl M D.Sizing analysis for aircraft utilizing hybrid-electric propulsion systems[R].Air Force Institute of Technology Wright-Patterson Air Force Base,OH Graduate School of Engineering and Management,2011.
[6]康桂文,孙振祥.通用飞机油电混合动力系统设计与性能仿真[C].中国航空学会第八届动力年会,沈阳:2014.
[7]刘斌,马晓平,王和平.小型电动无人机总体参数设计方法研究[J].西北工业大学学报,2005,03:396-400.
[8]方振平.飞机飞行动力学[M].北京:北京航空航天大学出版社,2008.
[9]刘斌,贺剑,张琳.小型无人机动力装置建模与仿真研究[J].飞行力学,2010,28(3):93-96.
[10]康桂文,胡雨,李亚东.超轻型电动飞机电动力系统的参数匹配[J].航空动力学报,2013(12):2641-2647.
[11]刘春,魏辉.飞机动力学仿真模型误差分析及调整[J].计算机仿真,2013,30(3):101-104.
[12]许震宇,周华,杨志刚.电动力轻型飞机的研制[J].航空科学技术,2007(6):26-30
[13]丁鼎,张云飞.考虑波阻的民用飞机爬升率性能计算方法[J].长江大学学报,2010,7(3):625-627.
[14]Guiwen Kang,Yu Hu,Yadong Li,et al.Research on parameters matching of ultra-light electric aircraft propulsion system.AMR,2002,19(3):67-70
[15]周龙保.内燃机学[M].北京:机械工业出版社,2005.
[16]Nomenclature I I.UCAV Configuration & Performance Trade-offs[J].2006.
(责任编辑:宋丽萍 英文审校:刘敬钰)
Simulation for take-off and climb performances of the hybrid-electric aircraft′s takes-off distance and climb rate
KANG Gui-wen1,2,SUN Zhen-xiang1
(1.Faculty of Aerospace Engineering,Shenyang Aerospace University,Shenyang 110136,China; 2.Aircraft Power Research Laboratory,Liaoning General Aviation Academy,Shenyang 110136,China)
The aim of the paper is to modify and design a hybrid-electric system for a general aircraft,and simulates the take-off distance and climb rate performances of this new hybrid-electric aircraft with MATLAB.According to the aircraft aerodynamic formula,the resistance and the influences of the external environment,such as like altitude,regarding taking the take-off procedure and climb procedure as a stationary process,the paper simulates the take-off distance and climb rate of this new hybrid-electric aircraft and the prototype one respectively by programming.The results show that the take-off distance and climb rate performance of hybrid-electric aircraft is superior to the prototype one,particularly in high altitude area.
hybrid-electric;general aircraft;climb rate;take-off distance;MATLAB
2014-09-08
康桂文(1972-),男,辽宁义县人,副教授,博士,主要研究方向:活塞式航空发动机设计理论及方法,E-mail:sunzhenxianng08@126.com。
2095-1248(2015)03-0067-04
V211
A
10.3969/j.issn.2095-1248.2015.03.013
