基于回波强度的海底底质分类系统关键技术
2015-02-15何林帮
何林帮 冯 杰
1 武汉大学测绘学院,武汉市珞喻路129号,430079
多波束声呐系统广泛应用于海底地形地貌测绘、海底底质勘探、海洋工程等方面[1]。海底底质分类对于海底矿物质、天然气水合物勘探等具有重要意义。目前已发表的海底底质分类文献只是提到底质分类中的一部分处理模块,没有全面系统地论述底质分类中的关键技术。唐秋华等[2]利用改进的BP 神经网络对底质进行分类,地貌辨识度也较高,但是没有系统论述波束脚印的精确跟踪方法,无法知道海底地貌的精确位置。马飞虎等[3]利用多特征主成分分析与声图相结合进行底质分类,但是没有具体论述回波强度的提取方法。孙文川等[4]论述了用于海底底质分类的多波束声强数据选取问题,对原始声强数据进行地形改正,得到反映底质信息的声强数据,但是没有消除中央波束反射对回波强度的影响。
本文通过论述基于回波强度的海底底质分类系统框架及系统中主要的处理模块,能够对高分辨率的海底多波来声呐图像进行精确分类。通过对ALL格式的原始二进制数据进行解译[5]以及声速剖面改正、航迹改正、归位计算等一系列预处理,进而构建高分辨率声呐图像。运用改进的BP神经网络将已知样本进行训练,利用样本训练结果对生成的声呐图像进行全图分类。实验证明,该分类方法的样本识别率和全图识别率都较高,能够为海底微地貌辨识提供精确可靠的依据。
1 系统框架
系统框架主要包括文件管理、ALL 格式原始文件解码、数据预处理、图像处理、样本处理、特征提取、分类器构建、图像分类等模块,如图1所示。本系统是基于Visual Studio 2010开发的,文件管理功能模块主要管理一些原始条带多波束数据、多波束图像、样本文件和分类结果报告等;ALL格式原始文件解码模块主要包括提取原始文件中的测深数据、声强数据、导航数据、姿态数据等;数据预处理模块主要包括声速剖面改正、航迹改正、波束脚印插值计算等;图像处理模块是利用多波束脚印插值的地理坐标和声强灰度值构建图像;样本处理模块主要包括样本的检测和选优;特征提取模块是对样本的16个特征值进行提取;分类器构建模块是利用BP神经网络对样本进行训练和检验;图像分类模块是利用样本的训练结果对全图进行分类。系统界面如图2所示。

图1 底质分类系统主要处理模块Fig.1 Main processing module of sediment classification system
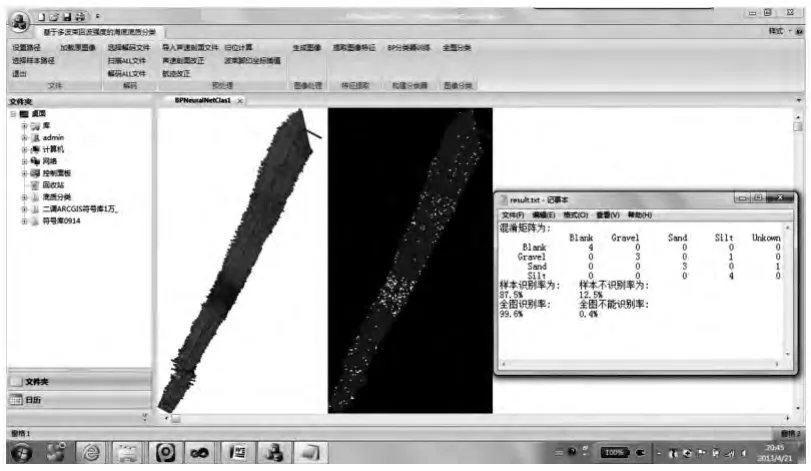
图2 底质分类系统界面Fig.2 Interface of sediment classification system
2 ALL文件格式解码
ALL文件格式是目前EM 系列通用的声学勘探数据组织格式[6],保存的内容很丰富,包含安装参数包、运行参数包、测深数据包、声呐振幅数据包、姿态数据包、导航数据包、潮汐数据包、声速剖面包等。每个数据包都有数据类型和大小说明,每个数据包就是单Ping数据。
ALL格式文件都是以安装数据包或运行参数包开始的,随后是各种类型数据包,这些数据包都是以20byte的数据包头开头,包括数据包大小、开始标识符、数据包类型、EM 系列号、时间日期、时间秒数、Ping序列号、声呐序列号。ALL文件格式结构如图3所示。
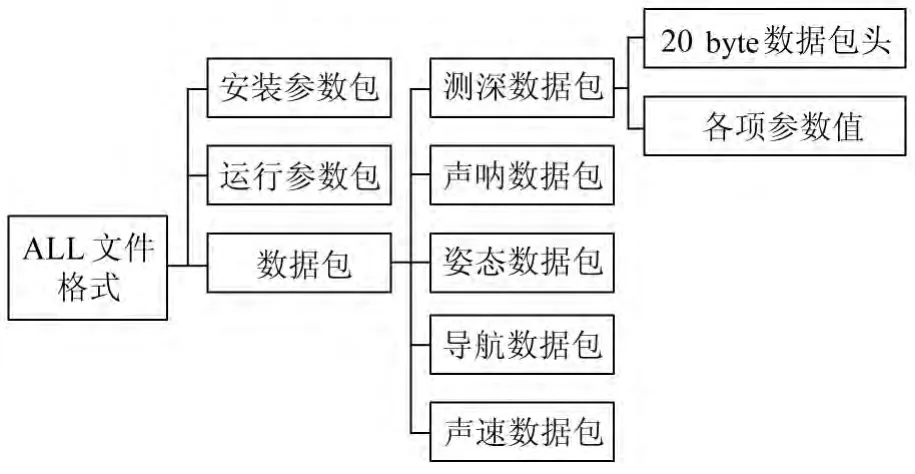
图3 ALL文件格式结构图Fig.3 Structure diagram of ALL format file
首先设置一个指针ptr指向文件开头的位置,此外再设置一个变量CurrentPosition记录指针指向文件的位置。把每个数据包前面的20 byte当作一个包头,设置一个结构体存储这个包头的8 个字段值。再设置一个包头结构体指针pALLPreface,指向这个包头的第一个位置,根据pALLPreface→NumberofBytes可以得知一个数据包的字节大小。根据读取的ALL 文件第一个数据包开头的4byte,就可判断文件的存储方式。如果是大端存储方式,遇到大于1byte的数据必须作移位处理,小端存储方式则不用移位。pALLPreface→StartID 若等于OX02 就说明数据包开始记录数据。pALLPreface→Datagram-Type是数据包的类型标识符,如OX49代表安装参数包,OX52 代表运行参数包。在读取完一个数据包后,使变量CurrentPosition加上前一个数据包的字节数pALLPreface→NumberofBytes,文件指针移动到下一个数据包头,以同样的操作提取下一个数据包,直到变量CurrentPosition的大小等于文件长度为止,整个ALL 文件解码工作结束。
3 系统主要处理模块
3.1 声速剖面改正
波束从换能器沿着不同的角度发射,形成一个垂直于船首方向、开角为一定角度的扇形剖面,除了垂直于换能器的波束外,其他角度的波束都是沿着不同的曲线方向到达海底的[7]。首先需要根据船体姿态确定波束的实际初始入射角,而后沿着实际初始入射角空间剖面进行常梯度声线跟踪,最终得到波束在船体坐标系下的三维位置。
由于传统声线跟踪方法计算波束脚印坐标时,船体的姿态(纵摇角p,横摇角r)是由船体先绕OX轴旋转角r再绕OY轴旋转角p得到的,但是实际情况并非如此,而是先绕OX轴旋转角α(≠r)再绕OY轴旋转角β(=p)得到的,而α=arcsin(sinr/cosp)。下面推导波束初始入射角θ0的计算模型。
实际声线可由理想状态下的声线经α、β旋转变换R后得到。设理想状态下,第i个波束分配入射角为θi,在不失精度情况下,假设在第一个水层以常声速传播,传播距离为Ri,则波束在第一水层下界的落点Pi坐标为(0,Risinθi,Ricosθi),而姿态影响下的实际坐标(xi,yi,zi)为:
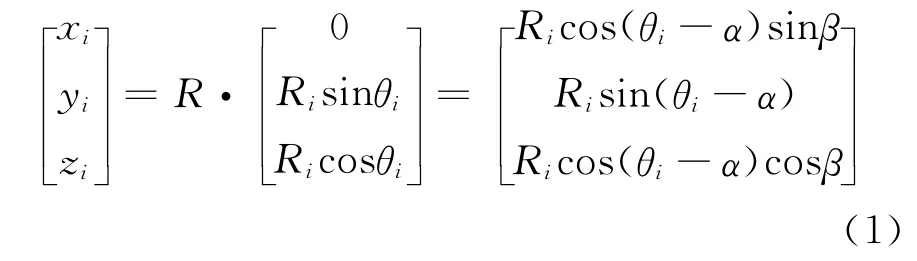
式(1)可借助图4解释。设基阵水平时,第i号波束的波束角为θi,斜距为R,则点A坐标为(0,Risinθi,Ricosθi)。基阵处于横摇r和纵摇p影响下,A点旋转到了B点,第i号波束的实际入射角度θi′=∠BOD。定义波束的水平角度φ=∠BDE,即为波束横距BD与OY轴的夹角,其表达式为:
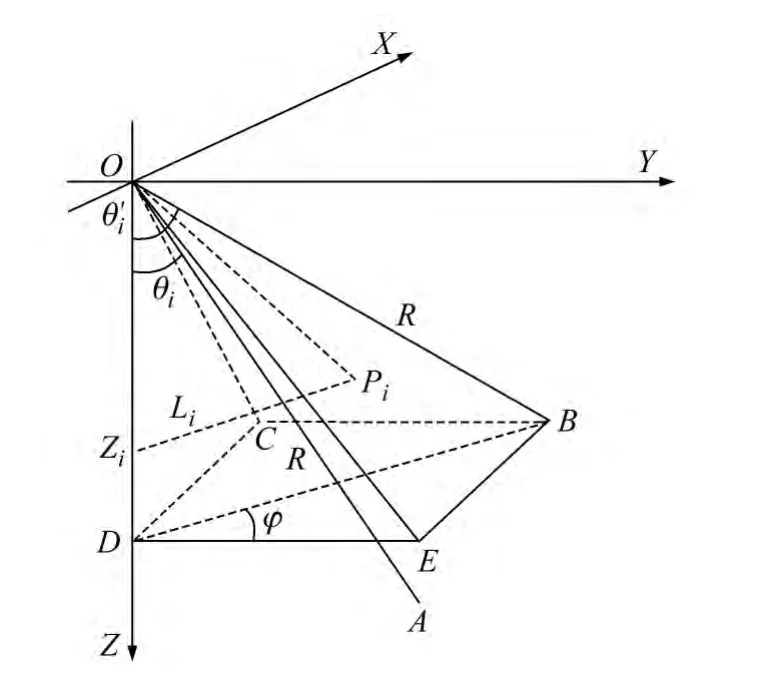
图4 波束点空间旋转示意图Fig.4 Schematic diagram of footprint rotation
3.2 归位计算
波束测深点在地理坐标系下的坐标可借助如下过程来获得。
1)实际波束初始入射角计算。首先计算换能器基阵面的实际旋转角α和β,并借助式(2)得到波束的实际初始入射角θi′。
2)常梯度声线跟踪。借助实际声速剖面、式(2)中获得的波束实际初始入射角以及波束传播时间t,借助常梯度模型进行声线跟踪,获得波束在理想换能器坐标系下的坐标(x,y,z)。
3)波束传播垂面与理想换能器坐标系XOZ面二面角Ab为:

4)波束测深点地理坐标为[8]:
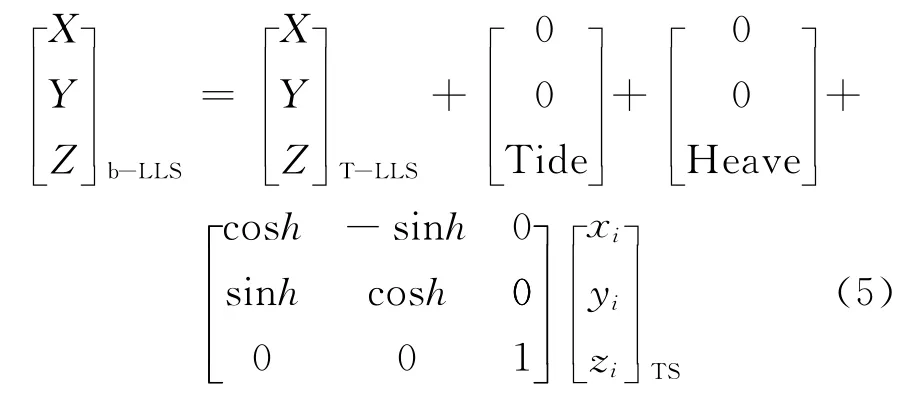
其中,下角b-LLS为地理坐标系下的波束测深点坐标,T-LLS为由GPS提供的换能器中心地理坐标,TS为换能器坐标系下的波束测深点坐标,h为波束垂面方位角,由罗经提供的航向角为A,则h为:

3.3 回波强度提取及改正
根据多波束Seabed Image Datagram 数据包结构,提取每个栅格的原始回波强度数据。在Seabed Image Datagram 数据包中,单Ping数据中有N个波束,每个波束记录着波束包络内所有的采样点数目,而每一个采样点又对应着一个栅格回波强度值,以及波束指向性采样点索引值[6]。根据以上数据结构特点,将整个波束包络按采样数划分相对应的栅格,每个栅格有一个采样点回波强度值,形成波束包络时序回波强度集。
回波强度改正包括时间增益改正和波束照射区面积改正。为了补偿由于传播、波束指向性及底质等变化所引起的信号衰减及起伏,得到远近场均匀一致的声呐图像,有必要对回波信号进行时间增益改正。根据声呐方程,可以得到与距离(时间)有关的两项,即传播损失和混响级,时间增益可依据下面公式来补偿[6]:
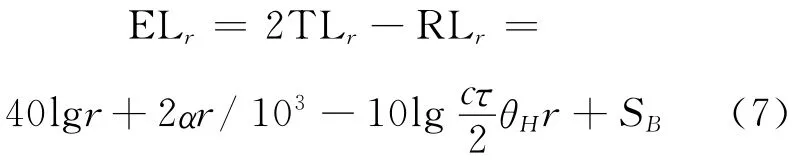
ELr为总衰减量(回波衰减)(dB);2TLr为传播损失(dB);RLr为混响级(dB);r为距离(m);α为衰减系数(dB/km);τ为发射脉冲宽度(ms);θH为换能器水平开角(rad);SB为回波强度(dB)。经过时间增益改正后,可得到与声波传播路径和波束指向性无关而仅与海底底质有关的回波强度。
当波束入射角位于中央波束附近(θ≈0°)时,海底固有反向散射强度(BSN)通常近似为一常数;当0°<θ<θcritical时,海底固有散射强度随入射角作线性变化;当θ≥θcritical时,海底固有散射强度随入射角的变化服从Lambert法则[9]。当波束入射角接近0°时,

当波束入射角θ为其他值时,

根据Lambert定律,对于不同入射角θ的BS 有两种计算方式:
3.4 改进的BP神经网络模型构建
下面介绍一种在线的自适应学习率附加动量项的BP神经网络。设是给定的训练样本集,其中。设O∈Rr是对应于输入的目标输出,定义瞬时误差为:

给定初始权值向量w(0)、w(1),则带动量项的在线BP算法的权值更新公式可表示为:


在自适应学习率附加动量项BP神经网络模型中,在误差曲面的平坦部分,增大动量因子,可使权值更新向量w(k+1)-w(k)获得较大的冲量,有助于权值逃离误差平面的平坦区域,从而加速算法收敛。而在误差曲面的陡峭部分,减小动量因子可以避免算法出现不稳定。在该模型中,动量因子是自适应变化的。误差曲面的陡缓程度可以用误差关于权值向量的梯度范数来刻画,当梯度范数较大时,误差变化较快,误差曲面较陡;反之,误差变化较慢,误差曲面较平坦。因此,可以根据误差关于权值向量的梯度大小来自适应调节动量因子。
3.5 图像分类
对监督分类而言,图像分类的基础是分类器对样本的训练结果,训练结果的优劣直接影响到图像分类的效果。首先对已知的底质样本进行特征值提取,本系统的特征值有均值、标准差归一化系数、三阶矩、一致性、熵、7个二维函数不变矩、4个灰度共生矩,共16个显著性统计参量[10-11]。对底质样本的特征值进行主成分分析,再通过改进的BP神经网络进行样本训练,最后利用样本的训练结果对海底底质多波束声呐图像进行全图分类。
4 实验与分析
实验用的多波束数据来自胶州湾某海域,使用EM3000多波束测深仪获得。经过预处理,得到每个波束的地理坐标X、Y和水深Z。在相邻的波束脚印内作内插,计算出每个栅格的坐标值,即为栅格的声强值作地理编码。作业单位采集的样本大致可分为砾石、沙、淤泥3类,每类样本取10个,然后提取每个样本的16个显著性统计参量。通过选取这些统计特征和自适应学习率,附加动量BP神经网络才能更好地解决这种模糊映射关系。
在计算出3类样本的统计特征值后,需要进行主成分分析前的标准化工作,主要是解决统计特征值差异悬殊的问题。进行标准化可以让不同的统计特征值归一化到一个大体可以比拟的数量级,避免在主成分分析时出现数值计算中“大数吃掉小数”的情况或主成分系数差异悬殊造成模型的不稳定。经过主成分分析后再作为BP 神经网络的输入值,采用改进的自适应学习率动量项,BP神经网络是一个3层网络,分别为输入层、中间层和输出层。输入层有10个输入单元,中间层有30个处理单元,输出层有1个输出单元。在样本训练时,取70%作为训练,30%作为检验。网络的初始学习率取0.8,误差取10-5,中间层的函数采用修正的S型函数,激活函数的斜率S和偏置δ都随误差信号进行修正,不仅可以提高神经元的自适应能力,也可以明显加快算法的收敛速度:

经过改进的BP神经网络对提取的底质样本进行训练,结果见表1,样本识别率达到90%,未识别率达10%。利用训练结果再对全图进行分类,全图识别率达到98.8%。底质分类前后对比如图5所示。实验证明,基于栅格回波强度的提取方式对底质分类比传统方式不仅在分辨率方面而且在地貌识别精度方面都有很大提高。
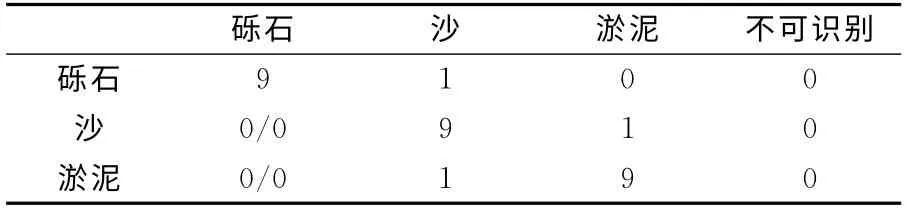
表1 利用提取的回波强度样本进行底质分类训练结果Tab.1 The training result of sediment classificatiom with sample extracted
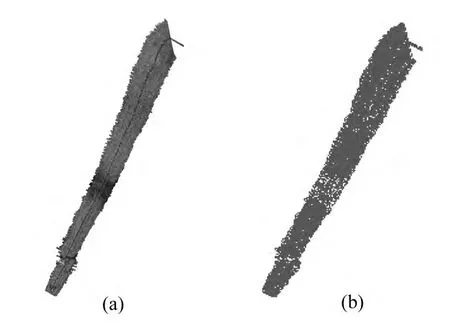
图5 海底底质分类前与分类后结果比较Fig.5 The comparison before and after sediment classification results
[1]赵建虎,刘经南.多波束测深及图像数据处理[M].武汉:武汉大学出版社,2008(Zhao Jianhu,Liu Jingnan.Multibeam Bathymetry and Image Data Process[M].Wuhan:Wuhan University Press,2008)
[2]唐秋华.基于改进BP神经网络的海底底质分类[J].海洋测绘,2009,29(5):40-43(Tang Qiuhua.Seabed Classification with Improved BP Neural Network[J].Hydrographic Surveying and Charting,2009,29(5):40-43)
[3]马飞虎.多特征主成分分析与声图相结合的海底底质分类[J].应用科学学报,2010,28(4):374-380(Ma Feihu.Seabed Classification Based on Principal Component Analysis of Multiple Features Combined with Sonar Image[J].Journal of Applied Sciences,2010,28(4):374-380)
[4]孙文川.用于海底底质分类的多波束声强数据选取研究[J].海洋测绘,2012,32(3):18-20(Sun Wenchuan.A Method of Sound Intensity Data Selection for Seafloor Classification[J].Hydrographic Surveying and Charting,2012,32(3)18-20)
[5]高金耀,方银霞,徐赛英.原始多波束数据的格式转换与统一[J].海洋通报,2002,21(6):68-74(Gao Jinyao,Fang Yinxia,Xu Saiying.Transformation and Unification of Various Formats of Raw Multibeam Data[J].Marine Science Bulletin,2002,21(6):68-74)
[6]Kongsberg Company Inst Ruction Manual.EM Series Multibeam Echo Sounders Datagram Sormats[EB/OL].http:∥www.kongsberg.com/,2010-06-15
[7]李家彪.多波束勘测原理技术和方法[M].北京:海洋出版社,1999(Li Jiabiao.Surveying Principle,Techniques and Methods for Multibeam[M].Beijing:Marine Press,1999)
[8]赵建虎,刘经南.多波束测深系统的归位问题研究[J].海洋测绘,2003,23(1):6-8)(Zhao Jianhu,Liu Jingnan.Problems on the Conformity to the Real Sounding Points From the Multi-beam Sounding System[J].Hydrographic Surveying and Charting,2003,23(1):6-8)
[9]Dimitrios E,Alireza A S,Mirjam S.Improving Riverbed Sediment Classification Using Backscatter and Depth Residual Features of Multi-beam Echo-sounder Systems[J].Acoustical Society of America,2012,131(5):3 710-3 725
[10]金绍华,翟京生,刘雁春.海底入射角对多波束反向散射强度的影响及其改正[J].武汉大学学报:信息科学版,2011,36(9):1 081-1 084(Jin Shaohua,Zhai Jingsheng,Liu Yanchun..Influence of Seafloor Incidence Angle on Multibeam Backscatter Intensity and Corrected Method[J].Geomatics and Information Science of Wuhan University,2011,36(9):1 081-1 084)
[11]SMRAD.Instruction Manual of Simrad Triton Seabed Classification[M].Norway:Simrad Company,1998