基于线性内插算法的北斗VRS改正数精度分析
2015-02-08王兵浩吕志伟于晓东唐文杰
王兵浩,吕志伟,石 鑫,于晓东,唐文杰
(信息工程大学导航与空天目标工程学院,河南郑州450001)
基于线性内插算法的北斗VRS改正数精度分析
王兵浩,吕志伟,石 鑫,于晓东,唐文杰
(信息工程大学导航与空天目标工程学院,河南郑州450001)
网络RTK技术是一种高度集成的高精度定位技术。目前,基于GPS的网络RTK技术研究比较深入,已经趋近成熟,但基于北斗的网络RTK系统还不够完善。本文基于长江口北斗网络RTK试验平台的实测数据,对北斗和GPS的网络RTK线性内插算法精度进行了对比,实验证明线性内插算法同样适用于北斗网络RTK,能提供较高的精度。利用生成的虚拟参考站观测量与流动站进行事后解算,得到厘米级精度。说明基于北斗系统的网络RTK能够提供与GPS相当的精度结果。
网络RTK;内插算法;VRS;北斗
0 引 言
网络RTK技术作为一种高度集成Internet技术、无线电通讯技术、计算机网络技术和GNSS定位技术于一体的综合定位系统,近年来有了长足的发展和应用[1]。由于其具有的分布均匀、高精度、可靠性强[2]等特点,这一技术被广泛应用于地籍测量、工程测量和近海船舶管理等诸多场合。
网络RTK的核心在于利用流动站周边的参考站坐标精确已知这一约束条件确定基准站间的电离层、对流层等空间相关误差项,利用流动站与基准站的空间关系通过特定的内插算法内插出虚拟参考站处的各项距离相关误差项。经过RTCM编码通过GSM、CDMA等方式发播给流动站用户,用户经过对收到的RTCM格式数据进行解码,进而求解虚拟参考站与流动站用户之间的超短基线,最终能够快速获得流动站厘米级精度坐标。
目前,基于GPS的网络RTK技术发展已经比较成熟,但是基于北斗的网络RTK系统目前尚在建设当中。近年来北斗系统的快速发展给北斗网络RTK的建设提供了必要的技术支撑。本文将对基于北斗的网络RTK虚拟参考站技术精度进行验证。
1 数学模型
虚拟参考站技术(VRS技术)是网络RTK技术中最为成熟、应用也最广泛的技术[3]。主要思路为:通过解算基准站基线网络,对流动站进行包裹,以流动站单点定位结果为基础,在流动站周围生成一个并不存在的虚拟参考站,通过内插得到虚拟参考站处空间相关改正数,利用内插出的改正数构造虚拟参考站处的观测量。
用V表示虚拟参考站;A表示主参考站;上标:s为卫星标记;r表示参考卫星。则基准站间空间相关综合误差可以表示为[3]

当通过内插获得主参考站与虚拟参考站间的综合误差后即可根据下式构造出虚拟参考站处的观测值[3]:
2 线性内插法
当各参考站基线上的空间相关误差确定后,就可以通过特定的内插算法计算虚拟参考站处的空间相关改正数。目前为止,国内外许多学者提出了多种利用VRS网络数据生成误差改正数的方法。主要有线性组合法、线性内插法、基于距离的线性内插法、条件平差法、最小二乘配置法等[3]。本文实验采用的是线性内插法,该方法实现简单、计算量小、效率较高,适用于基准站数量较少的情况。
线性内插法的原理[3-6]:利用基准站坐标和基准站间的改正数计算内插系数,进而内插出虚拟参考站处的改正数。具体算法如下:
当VRS网中有n(n≥3)个参考站时,其线性内插模型为[4]

式中:n代表主参考站;V表示参考站距离相关误差(对流层延迟或电离层延迟)估值;ΔX和ΔY为其他参考站与主参考站的平面坐标值之差,a、b为内插系数,可通过最小二乘平差法求得。

式中:

其元素ωi通常由各参考站至主参考站的距离确定,常用表达形式有:ωi=1,ωi=1/di,ωi=1/d2i,.本文采用ωi=1,即将各参考站的影响差异忽略,将所有参考站做等权处理。
求出内插系数后,在网络覆盖区域内可采用二维线性模型内插距离相关误差,有:

式中:Vun表示VRS改正数;ΔXun和ΔYun表示虚拟参考站与主参考站的平面坐标之差。
3 实验设计
本次实验分为流动站在基线网内和基线网外两种情况,采用上海长江口CORS实验平台的数据。该实验平台一期已经完成了在横沙岛、鸡骨礁、大戢山和芦潮港四个站点的基准站及其附属设施的建设,对长江口周边地区构成了网状覆盖,该系统的建立,将在海事管理、船舶精密导航、海洋测绘、水上工程施工、水上建筑变形监测、海洋气象等方面有着广泛的应用前景。
该实验平台采用华测接收机,华信天线(HXGG486A),能够接收GPS、北斗、GLONASS三个卫星系统数据。由于该实验平台目前仅有4个参考站,所以,无法通过上述方法对网内的点进行分析,故通过在网内已知点周围设置虚拟参考站,内插虚拟参考站处的原始观测量,作为基准站与已知点处的观测数据联立求解已知点坐标,与已知点真实坐标对比,对流动站在网内的情况进行验证。流动站与四个基准站相对位置如图1所示。

图1 基准站与流动站位置关系
对流动站在网外的情况,首先将大戟山站作为流动站,利用其他3个站构成基线网络,对大戟山站处的空间相关改正数进行内插。将大戟山站作为基准站,将其与另外三个站构成的基线进行求解,得到大戟山站相对于另外3个站的空间改正数,由于基线得到固定解后,模糊度正确估计,解基线求得的改正数可作为真值。将前两步得到的改正数进行对比以实现改正数精度的对比分析[7]。
4 GPS/BDS网内内插结果分析
由于未在网内架设基准站,所以采取在网内已知点处采集静态数据,进行事后解算的方式对精度进行验证分析。网内流动站架设在图1所示流动站处。
利用四个基准站观测数据(2014年5月26日)内插出已知点附近的虚拟参考站观测数据,并利用天宝后处理软件TTC2.7(Trimble Total Control 2.7)和中海达公司HGO软件(解算北斗数据)解算虚拟参考站与网内已知点构成的超短基线(GPS数据观测时段2014年5月26日15:13:41-15:26:09;BDS观测时段16:05:41-16:16:00),并将结果同已知点提供的平面坐标做比较,得到结果如图2所示。
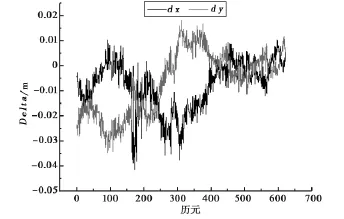
图2 TTC解算网内GPS数据结果
通过网内实验解算结果来看,采用本文提到的算法进行改正数内插构造观测量,GPS系统能够达到平面±5cm的精度,而对北斗系统的解算结果,能够达到与GPS相当,甚至更好的精度,说明本文提到的内插算法可行,且同样适用于北斗系统。
5 GPS/BDS网外内插结果分析
流动站在基线网外的情况,实验采用上海长江口CORS实验平台2013年12月14日的数据。经过基线网的初始化,得到基线间的空间相关改正数与内插得到的改正数之间的差值如下(观测时段2013年12月14日16:17:38-16:33:37)。
对于GPS系统,对L1和L2两个频点进行线性内插,得到的综合误差改正数与解基线得到的综合误差改正数的差值如图3、图4和图5所示。
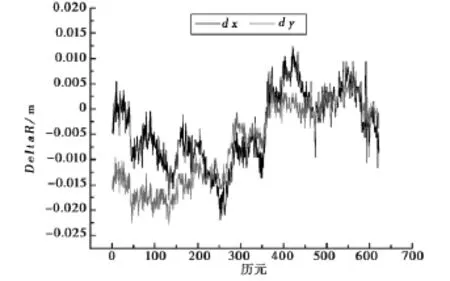
图3 HGO解算网内北斗数据结果

图4 GPS L1改正数差值

图5 GPS L2改正数差值
两者的综合改正数之差均能保持在5cm以内,可以认为,利用这些改正数可以将空间相关误差进行大幅修正,缩短流动站差分解算过程中获得固定解的时间,提高定位精度。为了验证通过本文算法构造的观测量的有效性,使用TTC软件对构造出的虚拟参考站观测文件和流动站静态观测数据进行解算,求解虚拟参考站和流动站构成的超短基线,与已知基线做对比,得到结果如图6所示。在平面方向,精度较高,大部分误差在1cm以内,在高程方向有所浮动,但基本保持在5cm以内。章节4中的算例来说,精度较高的原因可能在于,本节选用的数据为基准站接收机测得的,观测环境和数据质量相对于流动站接收机来更好。
同样,对于北斗系统,采用同样的方法,对B1、B3两个频点数据进行内插,得到的内插综合改正数与解基线得到的改正数之差如图7和图8所示(观测时段2013年12月14日16:25:00-16:29:10)。

图6 TTC解算GPS网外数据结果
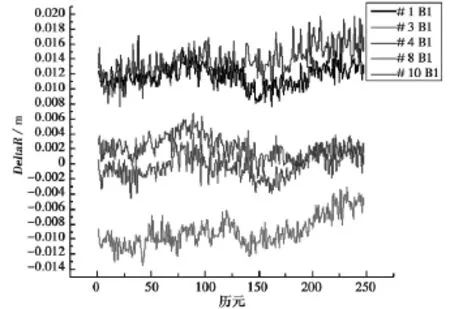
图7 BDS B1改正数差值
图中,1、3、4号卫星为GEO卫星,这3颗卫星的改正数差值相对于其他卫星较大,原因在于GEO卫星的轨道较高且与观测站位置相对固定,轨道误差较大。在后期的研究中将着重对这一影响进行定量的研究。
由于TTC2.7软件版本较低,不具备处理北斗数据的能力,故采用中海达公司后处理软件HGO求解北斗虚拟参考站与大戢山站构成的超短基线得到如图9所示的结果。

图8 BDS B3改正数差值
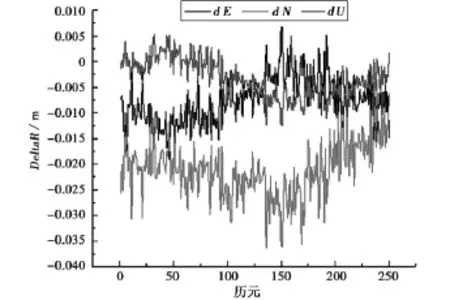
图9 HGO解算BDS网外数据结果
6 结束语
近年来北斗系统迅猛发展,北斗参考站开始大量建设,北斗网络RTK系统对于充分挖掘和利用北斗参考站丰富的数据资源、推动北斗卫星系统在各行业的应用具有极大的影响力,同时也将产生巨大的社会效益和经济效益。通过实验分析,可见线性内插法适用于VRS模式网络RTK数据生成,对北斗数据的处理也能达到较好的精度,为北斗网络RTK建设奠定良好基础。
[1]朱 超,高成发,赵 毅,等.基于VRS的GPS虚拟相位观测值生成算法研究[J].大地测量与地球动力学,2009(1):123-126,131.
[2]潘树国,王 庆,毛 薇.基于VRS的GPS网络RTK差分改正方法[J].中国惯性技术学报,2008(3):326-329.
[3]张 锋.基于多参考站网络的VRS算法研究与实现[D].郑州:解放军信息工程大学,2007.
[4]张成军.虚拟参考站误差分析与算法研究[D].郑州:解放军信息工程大学,2005.
[5]柳锦森.GPS网络RTK的VRS算法研究[D].合肥:合肥工业大学,2009.
[6]谢建涛,郝金明,邱 璇,等.GPS/VRS对流层延迟误差内插模型研究[J].测绘与空间地理信息,2013(2):139-141.
[7]柯福阳,王 庆,潘树国,等.VRS网络RTK关键算法与技术及精度分析[J].宇航学报,2009(3):1287-1292.
An analysis of BDS VRS Corrections Based on Linear Interpolation Algorithm
WANG Binghao,LÜZhiwei,SHI Xin,YU Xiaodong,TANG Wenjie
(College of Navigation and Aerospace Engineering,Information Engineering University,Zhengzhou450001,China)
The network RTK technology is a highly integrated positioning technology with high precision.At present,the network RTK technology research based on the GPS is reaching maturity,but the BDS network RTK system is not perfect enough.This article is based on the actual measurements of the Yangtze Estuary BDS Network RTK Testing Platform.With comparing of the BDS and GPS network RTK accuracy based on linear interpolation algorithm,the experiment proves that the algorithm mentioned in this article works well for BDS network RTK with cm-level accuracy.The post processing experiments also obtain considerable accuracy.
Network RTK;linear interpolation algorithm;VRS;BDS
P228.4
A
1008-9268(2015)01-0027-05
10.13442/j.gnss.1008-9268.2015.01.006
王兵浩(1989-),男,河北衡水人,硕士生,主要从事网络RTK、GNSS融合相对定位相关方面研究。
吕志伟(1974-),男,江西赣州人,副教授,主要从事卫星精密定位方向的研究。
石 鑫(1990-),男,四川成都人,硕士生,主要从事网络RTK相关算法方面的研究。
于晓东(1990-),男,河北邯郸人,硕士生,主要从事网络RTK相关算法的研究。
唐文杰(1991-),男,安徽宣城人,硕士生,主要从事网络RTK及行人导航方面研究。
更 正
2014-10-25
联系人:王兵浩E-mail:wangbinghao7@126.com
《全球定位系统》期刊2014年第39卷第6期第94页作者候宗祥更正为侯宗祥。