舰船管网漏损探测与定位方法
2014-12-07周泽渊
周泽渊,黄 钢,金 涛
(1.海军工程大学 动力工程学院,湖北 武汉430033;2.中国人民解放军92246 部队,上海201900)
0 引 言
舰艇的消防系统、冷却水系统、液压系统等管网系统都是影响舰艇可靠性、生命力的重要系统。舰艇战损与灾害是复杂而又充满变数的紧急事件。发生的偶然性、部位的随机性、应对的时效性、措施的复杂性和结果的多样性都使得舰艇损管已经成为现代与未来海军舰艇人员需求最多,过程最复杂多变的任务。
舰艇管网控制的核心问题是管网漏损探测并对漏损点定位。目前,对管道漏损的探测定位的研究主要针对输油管道等进行,而舰艇管网由于拓扑结构复杂、漏损探测定位困难,研究尚处于起步阶段,主要采用的方法包括流量平衡法、声监控法、基于数据统计分析的定位法等。其中流量平衡法和基于数据统计分析方法都需要测量管网中管段的流量数据,而流量计由于价格较贵且测量精度比压力计差;声监控法在舰艇环境下由于干扰较大,难以准确测定,且实时性较差,不能满足舰艇需要快速隔离漏损管段的要求。因此这些方法用于舰艇管网漏损控制都存在一定的缺陷。
当管道发生漏损时,节点压力减小,漏损处上游管段流量增大,且漏损点附近的漏损指数大于非漏损点附近的漏损指数,本文根据这一结论,利用模糊理论,通过设定系统故障隶属度和漏损指数,由管网中漏损指数最大值的位置(或最大值与次最大值)对漏损管段进行定位。
1 隶属度函数的确定
给定从全集X 到隶属度空间M(M 通常为闭区间[0,1])上的一个映射群uX。

称uX为集合X的隶属函数。其中,X为全集,是所有相关的对象或元素的总汇,它可以是离散的,也可以是连续的;M为隶属度空间,一般来说,M 是偏序集,具有反射性、对称性和传递性的特点;隶属函数uX表示元素属于模糊集的程度,元素对模糊集的符合程度,或者元素属于模糊集的真实性等。
任意一个模糊集都与一个隶属函数对应,但如何确定一个模糊集的隶属函数是一个尚没有得到完全解决的问题。在论域是实数集的情况下,常给定一些带有参数的,值域为[0,1]的函数,供各类实际问题选用,称之为模糊分布函数。
应用模糊理论的关键在于确定符合实际的隶属函数,本文选取三角形分布作为隶属度函数,即:

其中a,b,c为参数,且a <b <c。
2 基于模糊理论的漏损探测定位方法
2.1 算法概述
管网系统属于复杂系统,管网系统中有许多参量决定系统的运行状态,如管段直径、管长、管段粗糙度(摩阻系数)、节点需水量、水池水位、水泵扬程曲线等,这些参数有的可以得到很精确的数值,比如管长、管段直径等,一些则很难得到精确的数值,如摩阻系数、节点用水量等。
为了更好地解决漏损探测诊断中参数不确定性问题,本文通过使用模糊集来描述管网参数的独立参数。管网系统耦合度很强,如果数据不够精确,可能计算结果相差很大,因此可以选用常用的非精确数据作为模糊集。目前常将粗糙度系数、节点需水量和水池水位作为不能准确测定的参数,本文也将这3个参数作为模糊集参数。
通过采集管网中各个节点的压力数值,通过与预先设计好的最大值、正常值、最小值做模糊变换,得到各个节点和管段的漏损指数,漏损指数越大,节点附近发生漏损可能性就越大,因此漏损指数可以反映出管网系统最可能的漏损位置。当一个传感器探测到的压力值与管网系统压力正常值相等时,漏损指数为0;当压力值与最大值/最小值相等时,漏损指数为1;当压力值大于最大值或者小于最小值时,漏损值则大于1。
本方法首先需要将各个独立参数做模糊化处理,本文采用三角形模糊分布函数。每个参数可以设为1个集合,集合包括最大值子集、最小值子集和正常值子集3个子集。
Epanet 用于管网仿真计算时十分方便,但是计算比较死板,本身难以结合一些数学的理论方法,本文通过Epanet toolkit 结合Matlab 进行数值仿真,图1 给出了仿真程序设计的基本框架。
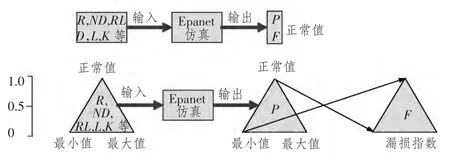
图1 基于模糊理论的漏损探测方法Fig.1 Leakage detection based on fuzzy methodology
图中:R为摩阻系数;ND为节点需水量;RL为水池水位;D为管段直径;L为管长;K为水头损失系数;P为节点水压;F为漏损指数。图1 中上图为通过仿真计算独立参数取为正常值时各节点的压力值和漏损指数;图1 中下图为计算独立参数分别取为最小值、最大值和正常值时对应的节点压力,通过将节点压力值模糊处理得到的节点和管段的漏损指数。
2.2 漏损探测与定位
管网系统由一系列的管段、节点构成。管段的物理连接点、水库、水池都是节点,而所有管段、阀门和水泵都被考虑为连线。管网系统中,摩阻系数、节点用水量、水库水位十分难以准确测定或者预测。由于管网系统中这些独立参数具有半定的特性,导致了管网系统可变参数(如节点水压、管段流量)具有非常强的不确定性。
Revelli 等提出基于模糊理论和优化的方法通过计算极值来解决管网中不确定问题。研究发现,管网系统独立参数 (如摩阻系数,节点需水量,水库水位等)取为正常数值,那么管网系统的可变参数 (如节点水压,管段流量,水质,流速)都是管网系统的正常值。但是,当管网系统独立参数取为最大值或者最小值时,管网系统的可变参数并不是它的最大值或最小值,通过模糊化方法确定出管网不存在漏损的特征参数,如压力、流量等可变参数。
下面对管网系统中的各个参数进行研究。假设一个模型已经经过了模型参数校验,所得数据较为精确。矩阵X为管网系统各个独立参数取为正常值时的矩阵。

Xji为管网中一个独立参数的数值,例如摩阻系数、节点用水量、水池水位等,每一列为同一参数的数值,Xji是第i个独立参数的第j个对象的编号。例如,第i 列代表摩阻系数时,j 就代表管段编号;第i 列代表节点需水量时,j 就代表节点编号。
矩阵Y为各个独立参数取为正常值时的可变参数矩阵,

Yjr为管网系统的可变参数,例如水压、流量、流速等,表示第r个参数的第j个对象的数值,设Ymax为可变参数的最大值矩阵,Ymin为可变参数的最小值矩阵,计算流程如图2所示。

图2 漏损指数计算流程图Fig.2 Flowchart for the calculation of the leakage index

当系统中传感器测得的数据在正常范围内,则管网系统既没有发生漏损也不存在堵塞物堵住管段的情况;当监测水压低于正常值时,既可能是由于管网系统可能存在漏损,也可能是由于管网系统中某些用户流量突然增大;当监测水压高于正常值时,则管网系统中可能发生堵塞,导致管段介质不能正常流通。本文试图通过模糊理论来判定管网是否发生漏损。
一般而言,由于管网系统各个参数的不确定性导致监测数据与理论计算值有不同程度的偏离。极端情况下,甚至超过最大值或者最小值。如果监测数据达到或者超过任意一种极值,则可以以故障隶属度为1 判定系统存在故障。
定义管网系统故障隶属度为:

当R =1 时,该节点或者管段发生漏损的概率较大;当R <1 时,该节点或者管段发生漏损的概率较小。因此当管网系统中故障隶属度为1的节点数大于故障隶属度小于1的节点数时,即可判定管网系统存在漏损管段,即num(R =1)>num(R <1)时,则管网中存在漏损管段。
定义漏损指数为:
当Ymin≥≥Ymax时,则有ILP >1 ,ILP 反映了节点和管段的漏损发生的可能性,ILP 值越大,节点和管段存在漏损的概率越大。离漏损管段越近的传感器计算得到的ILP 值越大,漏损管段附近的传感器得到的ILP 值最大,而次最大值应该紧邻漏损管段位置。
3 数值仿真
考虑如图3所示的管网系统,节点代表管网中的用户,线段代表管网的各个管段。节点2为虚拟节点,管网中的漏损可以等效为一个用水量随节点压力变化用户来处理,当节点2 有需水量时,该节点实际上就是一个漏损点。
当节点2为漏损点时,则其漏水量为:

式中:q为漏水量;C为泄流系数;p为节点2的压力;γ为压强系数,是一个定值。

图3 示例管网系统示意图Fig.3 Example pipe network system

表1 示例管网中各节点用水量Tab.1 Node's water demand
通过表1和传感器测得的数据既能确定漏损管段的位置,假设节点10 发生漏损,且泄流系数为3,则根据式(2)计算到各个节点的漏损指数如表2所示。

表2 节点漏损指数计算结果Tab.2 The calculated results of the node's leakage index
可以看到,节点10 上的漏损指数最大,是最可能发生漏损的节点,与节点10 相连的节点9 具有次大漏损指数。同时也可以看到,漏损对于下游的漏损指数大于上游的漏损指数。通过漏损指数可以判定漏损点位于10和节点9 附近,符合实际情况,但是也可以看到节点8的漏损指数也较大,会对漏损判断造成一定的干扰。
4 结 语
通过采集压力数据实现管网漏损实时控制关键在于漏损探测、定位算法的设计,漏损检测算法国外已有较多研究,但是在实际应用时存在诸多问题,本文提出了基于模糊理论的实时漏损探测方法,提出将漏损指标和故障隶属度作为舰船管网漏损特征参数,使得管网发生漏损时实现漏损点分布式探测定位,具有一定的现实意义。但是本文只对单漏损点的探测定位进行了研究,多漏损点的管网漏损探测定位方法有待进一步研究。
[1]LSLAM M S,SADIQ R,RODRIGUEZ M J,et al.Leakage detection and location in water distribution systems using a fuzzy-based methodology[J].Urban Water Journal,2011,8(6):351-365.
[2]陈宇辉.给水管网动态模型维护与校验方法研究[D].上海:同济大学,2005.CHEN Yu-hui.Study on maintenance and calibration method of water distribution network dynamic model[D].Shanghai:Tongji Univeristy,2005.
[3]DOWNS R.Design.Design,development and deployment of automated distributed control systems on active Navy Surface Combatants[R].California:MPR,2007.
[4]肖笛.城市给水管网爆管事故在线监测研究[D].天津:天津大学,2006.XIAO Di.Online monitoring of breaks in urban water distribution systems[D].Tianjin:Tianjin Univeristy,2006.
[5]HUGHES R,BALESTRINI S,KELLY K,et al.Modeling of an integrated reconfigurable intelligence system(IRIS)for design[C].Proceeding s of the ASNE Ships & Ship Systems,Symposium,2006:956-958.
[6]MOON K.Self-reconfigurable ship fluid-network modeling for simulation-based design[D].Georgia:Georgia Institute of Technology,2010.
[7]何存富,郑兴强,骆建伟,等.基于分布式光纤传感阵列的管网泄漏监测系统研究[J].光学技术,2011,37(1):76-79.HE Cun-fu,ZHENG Xing-qiang,LUO Jian-wei,et al.Research on leak detection system for pipeline network based on distributed optical fiber sensing array technology[J].Optical Technique,2010,37(1):76-79.
[8]易军,石为人,唐云建,等.无线传感器/执行器网络任务动态调度策略[J].电子学报,2010,38(6):1239-1243.YI Jun,SHI Wei-ren,TANG Yun-jian,et al.A dynamic task scheduling for wireless sensor and actuator network[J].Chinese Journal of Electronics,2010,38(6):1239-1243.
[9]刘百仓,林璐,林佳琪,等.EPANET 在城市多水源供水管网水力及水质计算中的应用[J].给水排水,2010,36(z1):416-419.LIU Bai-cang,LIN Lu,LIN Jia-qi,et al.The application of epanet in city water supply and quality piping network[J].Water and Wastewater,2010,36(z1):416-419.
[10]雷振,韦钢,言大伟,等.基于多Agent 联盟算法的含分布式电源配电网重构[J].电力系统保护与控制,2012,40(10):95-98.LEI Zhen,WEI Gang,YAN Da-wei,et al.Study of reconfiguration for the distribution network with distributed generations based on multi-agent alliance algorithm[J].Power System Protection and Control,2012,40(10):95-98.
