线控转向系统前轮转角控制仿真研究
2014-11-27杨胜培
杨胜培
(湖南师范大学工程与设计学院,湖南 长沙410083)
0 引言
目前,汽车转向系统仍处于机械传动阶段,由于机械转向的角传动比固定,汽车转向特性随车速和侧向加速度呈非线性时变特性[1],而线控转向(SBW)系统取消了转向盘和转向轮之间的机械连接,可以任意设计转向系统的传动比,因此,可以解决传统转向系统固定传动比造成的缺陷[2-3]。线控转向系统不但可以改善汽车转向的力传递特性,也可以任意设计汽车转向的角传递特性,使转向特性设计有很大的空间[4],能够提高汽车的操纵稳定性、驾驶舒适性和主动安全性,SBW系统已经被公认是未来汽车转向系统的发展趋势[5]。
1 线控转向系统的转动比
线控转向系统由于取消了转向轮与方向盘之间的机械连接,方向盘与转向轮之间的联接不再是固定的传动比。固定转向传动比的车辆,由于转向灵敏度将随车速影响变化较大,导致高速行驶转向灵敏,低速行驶转向困难,增加了驾驶员对车辆特性变化的补偿,提高了驾驶难度。由于线控转向系统具有变化的传动比特性,因此,研究线控系统传动比有重要的意义。线控前轮转向系统的理想传动比为[6]:

ks为转向灵敏度,设计时需要兼顾低速的转向灵敏,高速的转向安全并降低驾驶员的转向负担。在仿真中采用转动比随车速变化,取固定转向灵敏度ks=0.23。
2 二自由度前轮转向车辆运动方程
假定汽车在水平路面上匀速行驶,二自由度四轮转向车辆运动方程为[7]:
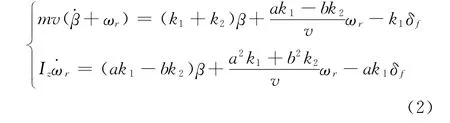
m为车辆质量;Ⅰ为车辆绕z轴的转动惯量;v为车辆纵向行驶速度;a,b分别为前后轮到车身质心的距离;L为轴距,L=a+b;k1,k2分别为前后轮侧偏刚度;δf为前轮转向角;β,ωr分别为车辆质心侧偏角和横摆角速度。
经过拉普拉斯变换,并令初始条件为零,解得横摆角速度对前轮转角的传递函数,并写成标准传递函数形式:

3 控制系统设计
3.1 控制策略及仿真研究
考虑实际中状态量质心侧偏角不可直接测量,横摆角速度便于测量,现控制系统只取横摆角速度作为反馈变量,设计转向盘转向角跟踪横摆角速度的综合控制,并把转向盘转角按比例转化为前轮转角进行仿真。
在此,利用前轮转向模型稳态横摆角速度反馈控制的方法,对前轮施加一个附加的转角。基本思路是:在前轮输入δ′发生转向时,通过横摆角速度反馈,将其与速度相关的同车型的前轮转向模型的稳态横摆角速度进行比较,将其横摆角速度差值通过控制器控制作为一个附加的前轮转角,与由转向盘通过传动比控制的前轮转角一起共同控制前轮转向。其控制算法流程如图1所示。
附加的前轮转向角为:

通过对图1中的k,i进行优化,使得控制系统性能达到最佳。在仿真试验中,根据式(1)采用v>v0计算式计算i值。

图1 横摆角速度反馈控制算法
3.2 优化的性能指标
车辆的横摆角速度是衡量车辆操纵稳定性的重要标志。若能控制车辆的实际横摆角速度与期望值的差值,将能提高车辆运动的安全性。因而控制系统的性能指标可以表示为:

ωr为期望的横摆角速度,该值可以采用线性2自由度模型估算[7]:

考虑到轮胎与路面之间的附着极限,横摆角速度的最大值不能超过ωrmax。

因此,车辆横摆角速度可能的取值为:

当实际横摆角速度与期望横摆角速度相同时,车辆具有轻微的不足转向特性,可操纵性能好。
3.3 基于优化函数的参数整定
一种整定方法为[8]:利用Matlab非线性最小平方函数Isqnonlin(),按照最小平方指标J=∫e2d t进行参数寻优,得到优化的k和i,实现线控转向系统传动比和控制器参数的整定。
该二次项性能指标J即为优化设计中的目标函数,它是评价车辆操纵稳定性的性能指数。如果J值得到了降低,说明车辆的实际横摆角速度和参考模型的横摆角速度变得比较接近了。
以误差目标函数为依据,实现对图1中未知参数的优化整定,如图2所示。

图2 参数优化的系统结构
4 仿真
仿真模型参数为:m=1 360 kg,Ⅰz=2 790.8 kg·m2,k1=-74 371.53 N/rad,k2=-78 618.20 N/rad,a=0.988 m,b=1.699 m。在 Matlab环境中,研究转向盘转角阶跃输入下车辆的横摆角速度响应。车辆以3 m/s,15 m/s,25 m/s和35 m/s的速度稳定行驶,然后给转向盘一个0.3 rad,起跃时间为1 s的角阶跃信号输入。车速变化时,车辆横摆角速度响应的对比如图3所示。
由图3可以看到,车速从15 m/s,25 m/s变化到35 m/s时,上升时间基本不变;调整时间分别为0.545 1 s,0.838 1 s,1.18 s,即随车速的增大,调整时间有所增加;最大超调量分别为1.59%,8.55%,11.0%,即随车速增加,超调量也增加。但不论车速如何变化,其稳态值都趋近于同一值。在车速下降到3 m/s时,采用定传动比进行仿真实验,车辆达到稳态的时间更短,但横摆角速度稳态值有变化。

图3 有控制时不同车速的质心侧偏角阶跃响应
由图4(v=35 m/s)可知,车辆的横摆角速度稳态时,达到中性转向时的横摆角速度,并且横摆角速度反馈控制的超调量更小,反馈控制时,超调量降低,振荡减缓,反应加快。与同车型相同前轮转角没有控制的车辆相比,采用反馈控制的线控转向车辆,超调量减少18.4%;上升时间、调整时间分别减少0.085 2 s,1.014 8 s,占反馈控制线控转向车辆的上升时间、调整时间的百分比分别达104.4%,64.1%。稳态值不变,说明驾驶线控转向车辆时,驾驶员的驾驶习惯可以不变,而操控难度降低。
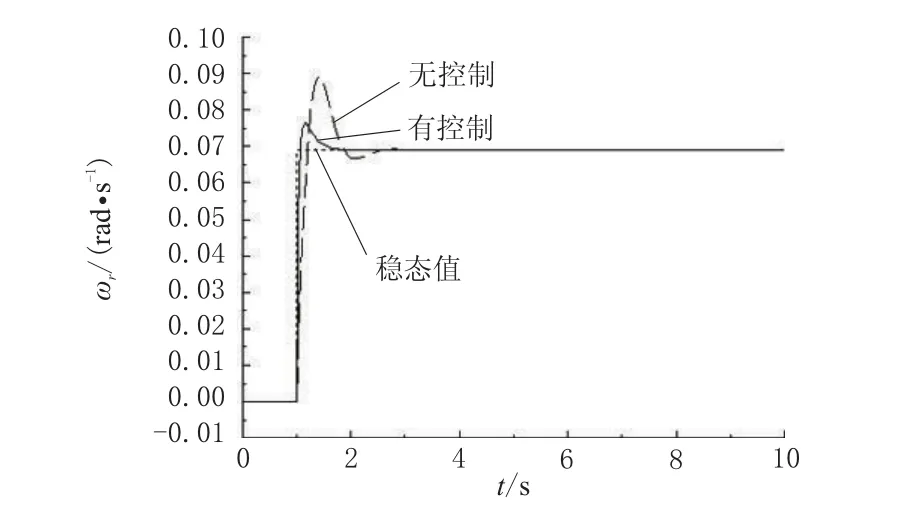
图4 同车型线控转向横摆角速度阶跃响应的对比
v=35 m/s时,线控转向系统的横摆角速度与稳态转向时横摆角速度的差值如图5所示。由图5可以看出,除起始时横摆角速度相差较大外,误差值很快趋近于零,表明算法具有较好的跟随性能。
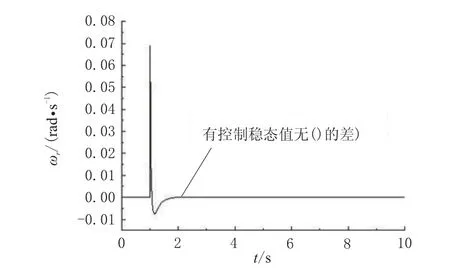
图5 线控转向横摆角速度与稳态转向横摆角速度的差值
5 结束语
对线控转向系统中转向执行机构的操作稳定性问题进行研究,提出了基于前轮稳态转向模型横摆角速度反馈控制的思路和控制算法。利用Matlab软件平台,对线控转向系统的转动比以及控制参数进行优化,并对车辆行驶速度为3 m/s,15 m/s,25 m/s和35 m/s时的横摆角速度进行了仿真研究分析。结果表明,提出的前轮转角控制算法能够提高车辆响应速度,有效提高汽车行驶的稳定性。
[1] 郭孔辉.汽车操纵动力学[M].长春:吉林科学出版社,1991.
[2] 王 健,高 勇,宁生科,等.基于DSP控制的高精度汽车电子转向器研究[J].机械科学与技术,2006,25(9):1085-1087.
[3] Hsu Y H J,Gerdes J C.Stabilization of a steer-bywire vehicle at the limits of handling using feedback linearization[C]//Proceedings of MECE2005 2005 ASME International Mechanical Engineering Congress and Exposition,2005:483-492.
[4] 宗长富,麦 莉,郭学立.汽车前轮电子转向系统[J].中国机械工程,2004,15(11):1022-1025.
[5] Rath M,Kelly M,Kober K,et al.Optimum design of a steer by wire system using systematic systems engineering approach[J].SAE Int.J.Passeng.Cars-E-lectron.Electr.Syst.,2009,1(1):553-559.
[6] 于蕾艳,林 逸,施国标.线控转向系统的角传动比研究[J].农业机械学报,2007,38(8):190-192.
[7] 余志生.汽车理论[M].北京:机械工业出版社,2000.
[8] 陈剑桥.非线性PID控制器的计算机辅助设计[J].扬州职业大学学报,2001,5(4):12-15.