建筑工程塔吊倾斜自动修正装置设计研究
2014-10-24张先源靳鹏伟彭瑞莹田伟伟
张先源 靳鹏伟 彭瑞莹 田伟伟
(湖南科技学院 土木工程与建管理系,湖南 永州 425199)
0 引言
塔吊又名塔式起重机,是现代工业与民用建筑的主要施工机械之一塔吊上端分为三个部分:平衡臂、起重臂、塔顶。塔顶与两臂连接后再在塔顶上端分别与两臂装上拉杆。拉杆能够使臂稳定不下落,其次吊东西就是利用杠杆的原理,只要两臂受力平衡就不会吊翻塔吊。当小车走的越远则塔吊吊的东西越轻,越近越重,此外,在升高 30米后,每升几节标准节就会装附墙,固定在建筑物上。塔吊危险性高,如何实时监测塔吊倾斜状态是很多建筑施工单位重点关注的技术改造内容。塔吊的设计、安装、维修和严格的使用管理机制对于塔吊的安全至关重要。就算管理规范、严格操作,但由于塔吊安全监测场地的特殊性和复杂性,有时候还是会因为塔吊日晒风吹等因素,造成一些意外事故,从而造成伤亡。此外工地一旦出现塔吊倒塌事故,整个工地将会停工,这不仅严重影响工地的施工进度,而且影响整个项目的收益。因此,为了减少伤亡,最大限度提高项目的收益,避免塔吊倒塌事故的发生就变得尤为重要。
1 设计构思
就全国而言,对于塔吊倾斜的检测设备还处于设计阶段,目前还没有应用到实际去。对于塔吊倾斜度检测设备的设计,国外发达国家如美国、走在我国前面,例如:法国Potain公司生产的动臂式自升塔吊和汽车式快升塔吊,这两种塔吊也没有倾斜自动修正的功能。当然,我国也是后起之秀,目前,已经了塔吊有检测设备应用的实例了,如:塔吊倾斜报警器等。但是他们致力于研究智能的报警装置,并没有研究能够修正塔吊的装置,不能从根本上解决塔吊倾斜问题。所以,应从这两个方面下功夫。
塔吊事故发生的原因主要有以下几种[1]:1、起升机构制动力矩不足,导致吊物快速下落,吊物触底后,塔吊前倾力矩瞬间释放塔吊整体平衡遭到破坏,起重臂在向上力的作用下反弹,产生一个力矩,导致塔身基础节与标准节之间的连接螺栓拉断从而造成安全事故。2、由于塔机的塔身过高,长细比太大,倘若此时塔机重物倾斜,或者其他额外的荷载,例如突起的大风给塔机造成了一个横向剪切力,失去附着装置的塔机的平衡性大大折扣,对付倾覆横向力的能力也大打折扣,大风变成阵风对塔机不断的进行摇晃,导致塔机的重心严重的偏移,以至于塔机倒塌。3、塔吊本身的质量问题。4、操作不当。
综合以上原因,塔吊主要的原因就是力臂倾斜,导致塔身重心严重偏移,从而使吊塔收到过大的偏心力而摇摇欲坠。塔吊是建筑起重机械设备中技术含量较高的设备,从安装、使用到拆卸整个过程基本上是高空作业,本身就有一定的危险性,只有专业的管理人员、技术人员和操作人员严格按照有关的规定操作才能保证塔吊的安全和正常的运行但是,仅仅从操作规范上去根本的解除安全隐患时不切实际的。
本文拟设计一个能检测并修正塔吊的设备,实现自动修正功能,以减少工程事故的发生,保证工程进度和收益。
2 塔吊报警装置的设计
目前,我国还没有出现塔吊自动倾斜自动修正装置,本设计通过红外线感应技术测量塔吊的倾斜程度,将信号传给塔吊顶部的自动修正系统,在系统计算之后,有传动装置拉动平衡装置修正塔吊的倾斜度,从而达到修正塔吊倾斜的目的。现表述如下:
1)当红外线激光检测到塔吊的倾斜度超过一定值后,马上把信号传给塔吊修正系统,修正系统通过预先编好的程序,计算出平衡装置修要移动的距离,然后由电动机带动塔吊大臂上的平衡木移动到修正系统计算好的位置即可。
2)当一次修正完成之后,平衡木将会停在修正完成时的位置,如果这次修正没有达到塔吊倾斜的允许值,那么红外线激光将会再次发送信号给修正系统。
周而复始,直到塔吊恢复正常的工作状态。当然,如果一天的工作结束之后,塔吊大臂上的平衡木就会回到一开始的位置,使塔吊处于垂直状态。
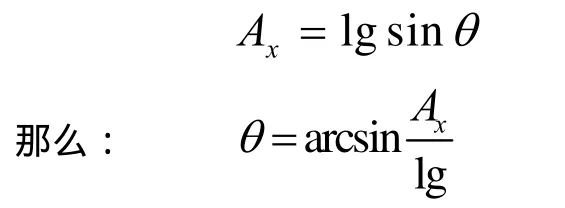
3)设置报警装置塔吊都有自己的工作极限,往往安全事故很大一部分就是钢管疲劳,损耗,抗弯能力和抗剪能力大大下降。而在工作时又加上超负荷工作和人员操作不当大大缩短了塔吊的使用寿命,而且还存在很大的安全隐患。此时很有可能在钢管的薄弱处或受力最大处发生断裂。因此,结合钢管的最大挠度,承载力和厂家提供的数据资料,可以推算出钢管的最大变形范围。在钢管下面安装一个红外检测报警装置。针对塔吊倾斜测量的特殊性:响应速度快,测量精度高以确保塔吊在工作时,其倾斜角度必须在安全范围内,一旦超出极限值,测量仪必须以最快速度报告现场操作员和监控中心。为此采用三轴加速度测量方法获取两轴倾斜角度。其中倾斜角度可按如下计算公式计算【2,3】:
当用单轴测量稳定性较难处理,为获取较好的测量效果,采用两轴测量加速度获取倾斜角度,基本原理与前类似,计算公式为【2,3】:


显然同时要获取x,y轴两个方向的倾斜度角度只需同时测量3个方向的加速度即可,计算模型如下式所示【4】:

为快速准确获取塔吊工作中的倾斜状态,本设计采用2套三轴加速传感器测量芯片,快速分析、计算得到结果。
3 塔吊自动修正装置的设计
3.1 整体结构设计及功能说明
下图为塔吊实物简化的正立面图。它高为20m,工作半径大约为直径24m。它包括塔身、平衡臂、起重臂、驾驶室等部分构成。
在工作过程中,由于起重臂的重量过大或者启动瞬间产生的启动力而导致整个塔吊倾斜、摇摆等现象,现将塔吊的受力情况分别讲述:
先考虑满载时的情形,以塔吊整体为研究对象,要保证机身满载是平衡而不向右倾倒则必须:


再考虑空载时的情形,这时W=0.要保证机身空载时平衡而不向左倾倒,则必须满足平衡方程【4】:

将塔吊的制动臂单独分析,又有如下图:
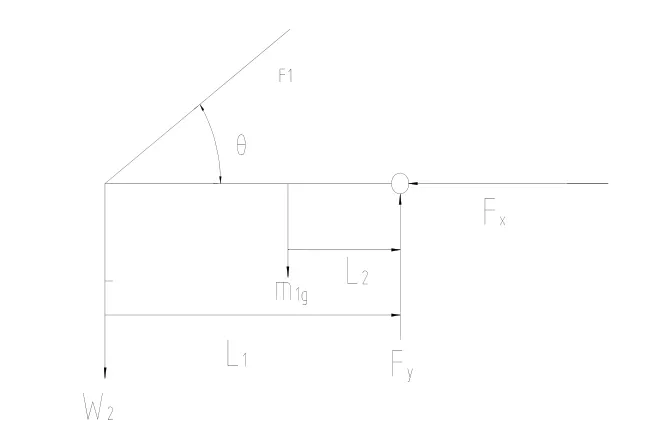
对于上图由理论力学公式【4】有:
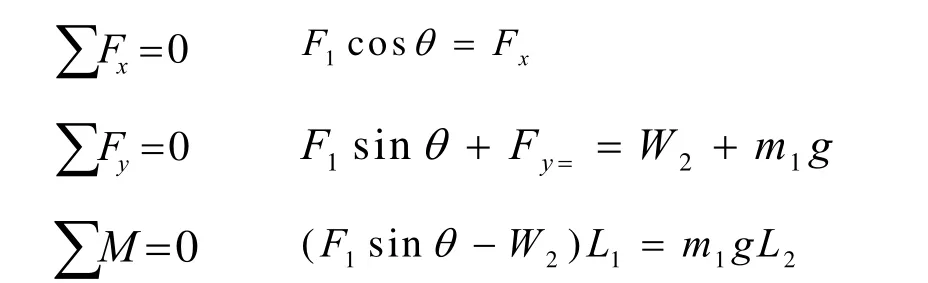
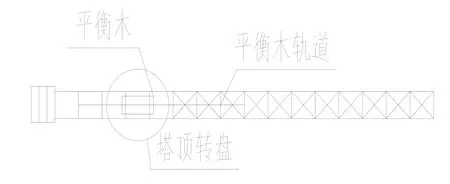
如果将塔吊起重臂上起重的重物简化成一个集中力,平衡木简化成另外一个力,平衡臂上的平衡重物简化成一个力,那么,整个塔吊就可以简化成为一个杠杆。
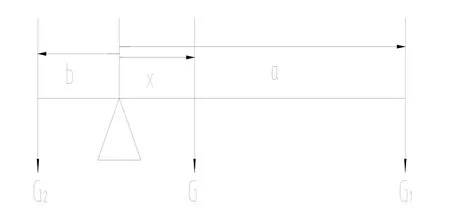
由杠杆原理的平衡条件【4】有:
这样系统就可以自动计算出平衡木需要移动的距离X和方向,从而实现塔吊的自动修复。
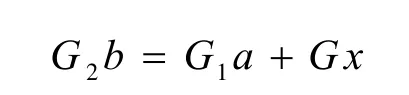
下图为塔吊的剖面图。它反映塔吊和整个修正装置的位置关系。
3.2 设备选择
制作本套装置不需要设计新的机械,只要把激光检测设备、电脑计算系统、电动机、调节平衡木、激光测距仪按照设计图纸组装在塔吊上即可。但设计需要的这几项仪器都比较贵,所以造价较高。
4 传动设计及工作流程
4.1 传动设计
塔吊平衡臂在工作时,会出现不可避免的往重的一侧倾斜。重心就会往外侧偏移。偏移越多,塔身的倾斜度就会越大。往往这种重心偏移会使得平衡臂与塔身的节点处弯矩迅速增大,很容易造成钢管薄弱处发生断裂,从而易导致事故的发生。塔吊的工作安全性就降低了许多。此时红外线检测装置检测到一个角度,并且迅速及时的传送到修正装置处理中心,修正装置就是实时的计算出平衡装置的调节距离,通过电动机拉动平衡木移动到修正位置,塔吊就会在平衡木的力的作用下逐渐的恢复平衡。重心往左边偏移。平衡木的运动距离是根据塔吊的最大荷载和空载的情况计算得到的,所以进一步保证了塔吊的安全性。在工作过程中,我们可以将最大倾斜角设置的稍小一点,这样,就预留了充足的调整时间。像这种动态的实时调节能够很好的预防塔吊过度的倾斜,缓解工作人员的心理压力。
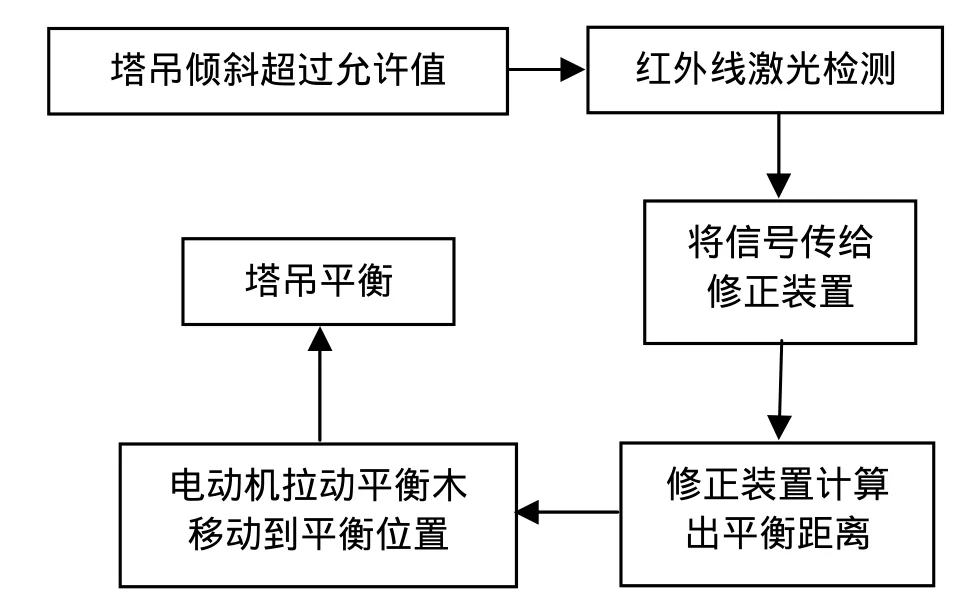
4.2 工作流程
下图描述了塔吊修正系统的整个工作流程。
5 设计总结
在我们对课题做了详细的计划后,我们团队积极行动,通过各种渠道收集资料,利用假期到塔吊生产公司进行学习;经过我们的精心准备,根据上述设计思路和图纸,用木材制作一个模型进行试验;取得了我们预期试验效果。通过这一次的课题,从开题、中途学习和收集资料、到制作模型进行试验,在一次又一次的失败中,我们团队不仅没有放弃,而是摸索与探究越挫越勇,最后我们完成了我们的课题。
[1]课程教材研究所.物理[M].北京:人民教育出版社,2007,(9).
[2]刘平.材料力学[M].武汉:武汉理工大学出版社,2007,(8).
[3]李廉琨,结构力学[M].北京:高等教育出版社,2011,(11).
[4]周衍柏,理论力学[M].北京:高等教育出版社,2005,(10).