应用于雷达方位超分辨的改进Richardson-Lucy算法*
2014-09-28邹建武祝明波董李相平
邹建武,祝明波董 巍,李相平
(1.海军航空工程学院,山东烟台264001;2.海军航空管制设备维修中心,北京100071)
1 引言
雷达方位超分辨就是在不改变雷达工作体制前提下,利用数字信号处理技术分辨同一雷达波束内的几个等距目标,一直以来都是雷达探测领域研究的热点。主要的方位超分辨方法有迭代反卷积法、RL算法、广义逆滤波法和维纳逆滤波算法等[1-9]。
Mark A.Richards等[1]提出了一种约束迭代反卷积法(CID)和一种快速迭代反卷积法 (FCID),CID算法在特定情况下,方位分辨力改善了4倍,但算法收敛速度慢,计算量较大;FCID虽然提高了运算速度,但是分辨性能下降。文献[2-3]利用基于Bayesian准则的RL算法实现了雷达方位超分辨,并对算法的超分辨性能进行了深入研究,该算法在信噪比0 dB条件下,方位分辨力提高2倍。但是,上述两种方法均是基于噪声分布为泊松分布的情况下。丁义元等[4]提出利用广义逆滤波方法提高实孔径雷达角分辨力,在高信噪比的条件下,有效地改善了实孔径雷达的角分辨力,但时域计算较为复杂。文献[5-7]利用维纳逆滤波算法对提高雷达方位角分辨力进行了研究,在雷达回波信噪比大于30 dB的情况下,该方法可实现方位超分辨,证明了维纳逆滤波算法实现方位超分辨是可行的,但不适用于低信噪比条件。
RL 算法由 Richardson[8]和 Lucy[9]先后独立提出,主要用于射电天文学和医学中图像的复原,具有良好的频谱外推能力,但其是基于噪声分布为泊松分布的分辨算法。本文将RL算法应用于噪声服从高斯分布的雷达方位超分辨问题中,在噪声存在的条件下,虽然RL算法也能分辨目标,但噪声使得分辨结果出现虚假目标,且RL算法收敛速度慢。本文针对上述问题,将去噪和加速RL算法相结合,得到一种改进RL算法,应用于高斯噪声条件下雷达超分辨问题中。
2 雷达方位回波信号统计观测模型
为简化分析,仅考虑方位角的变化。假设常规雷达在方位向上扫描,实孔径雷达的方位回波信号表现为天线方向图与目标方位信息卷积,雷达目标方位回波模型可以表示为

式中,x(θ)为目标方位信息;h(θ)为雷达天线方向图;n为加性噪声,主要是接收机噪声,本文主要考虑加性噪声。将式(1)转换为矩阵-向量表达式:

其中:


式(2)解释为雷达方位回波信号统计观测模型,当n~pn(n),假设y中每个元素的分布是相互独立 ,则有

因此,雷达超分辨问题可以转化为参数估计问题,常见的估计方法有极大似然估计,最大后验概率估计和矩阵估计方法。
3 RL算法及其改进
3.1 RL 算法
RL算法是一种具有频谱外推能力的迭代算法,假设噪声为泊松分布。采用最大似然法进行估计,通过Picard迭代算法得到如下迭代公式:
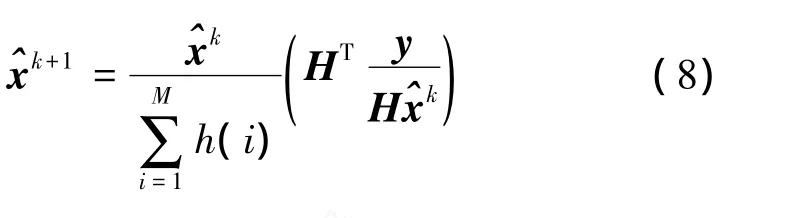
3.2 改进 RL算法
RL算法是一种最大化可能性数据逼近算法,该算法在噪声影响可忽略或较小时,随着k不断增大,会依概率收敛于x;但在噪声不可忽略,尤其是在低信噪比条件下,经过多次迭代,恢复的目标中会出现虚假目标,在应用RL算法过程中,为消除噪声的影响,在出现虚假目标或者算法结果变差以前,终止迭代[2],因而RL算法难以获得较好的超分辨效果,且RL算法收敛速度较慢。基于上述问题,本文对RL算法进行了改进。
当存在噪声时,将式(2)代入式(8)得

从上式可知,若存在噪声,则上述的收敛性难以保证,存在噪声被放大的缺陷,消除噪声对RL算法很重要。由于雷达目标回波信息主要集中分布在低频段,噪声的信息主要集中在高频段,因此我们将高频段的噪声去除,来降低噪声对RL算法的影响。
综上所述,本文中的改进RL算法,首先利用低通滤波器[11]对雷达目标信号进行去噪处理,同时鉴于RL算法收敛速度慢的缺点,我们利用加速RL算法[12]来对滤波后的信号进行超分辨运算,改进RL算法的迭代公式

式中,accRL(·)为加速RL算法,Y(ω)为y的傅里叶变换,G(ω)为低通滤波传递函数,F-1为傅里叶逆变换。加速RL算法是一种矢量外推加速方法,其数学表达如下:


3.3 迭代次数选择
RL算法迭代次数直接影响方位超分辨结果和计算时间。在低信噪比条件下,用RL算法得到的结果会先接近真实目标,再偏离真实目标。本文选用基于均方误差(MSE)准则的迭代次数选择方法:

在不存在噪声时,随着迭代的进行,MSE的值会变小,最后趋于平稳,考虑到超分辨效果和计算时间,此时选择使MSE值趋向平稳时的最小迭代次数即可。在存在噪声的条件下,随着迭代的进行,MSE的值会先变小,后变大,此时可选择MSE值最小时的迭代次数作为算法的总迭代次数。
4 RL算法与改进RL算法对两点目标的分辨性能仿真
4.1 无噪声条件下RL算法仿真
假设脉冲重复频率为1 kHz,扫描速度为100°/s,扫描范围为-15°~15°,天线方向图采用辛克型,半功率波束宽度为2.7°。在不存在噪声条件下,用RL算法对间隔1/2半功率波束宽度的两个等幅点目标(分别位于-0.675°和 0.675°)进行了分辨,分辨结果与相应的均方误差如图1和图2所示。

图1 无噪声条件下的分辨结果Fig.1 Resolution result without noise
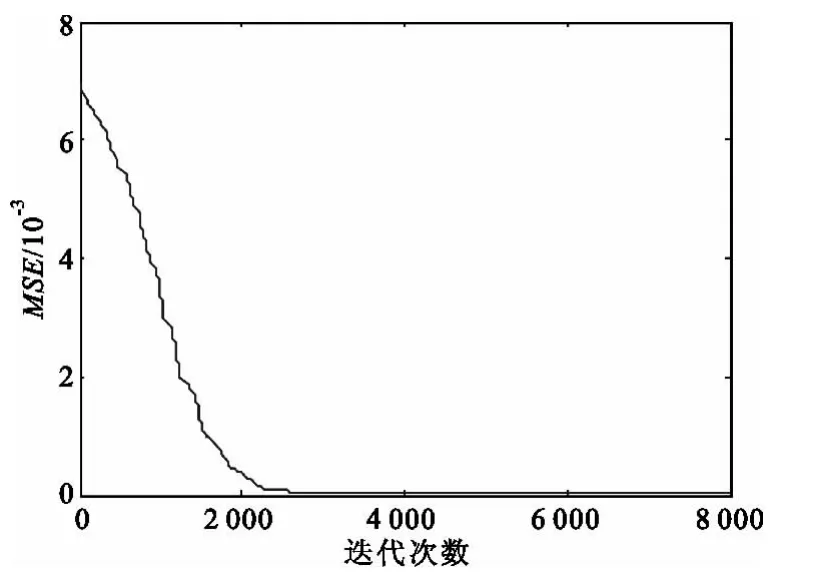
图2 均方误差Fig.2 MSE
上述的仿真条件是针对小型实孔径雷达平台提出的,研究雷达对海或对空搜索目标时的雷达目标方位超分辨问题,此仿真不考虑真实场景的影响。图1中的*表示点目标的实际位置,由图可看出,无噪声时,利用RL算法可以分辨出间隔1/2半功率波束宽度的两个点目标,且随着迭代次数的增加,MSE值趋于零。此时综合考虑,我们选择终止迭代次数为2 000。
4.2 噪声存在条件下RL算法与改进RL算法仿真
针对上述仿真参数,分别利用RL算法和改进RL算法,在信噪比分别为30 dB和20 dB条件下对方位间隔分别为1/4和1/2半功率波束宽度的两个等幅点目标进行了分辨,仿真结果如图3~6所示。
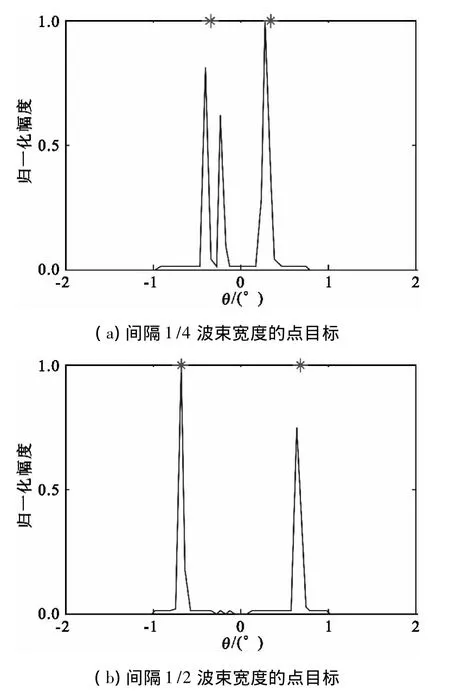
图3 30 dB条件下RL算法结果Fig.3 Results of RL algorithm with SNR=30 dB

图4 30 dB条件下改进RL算法结果Fig.4 Results of improved RL algorithm with SNR=30 dB

图5 20 dB条件下RL算法结果Fig.5 Results of RL algorithm with SNR=20 dB
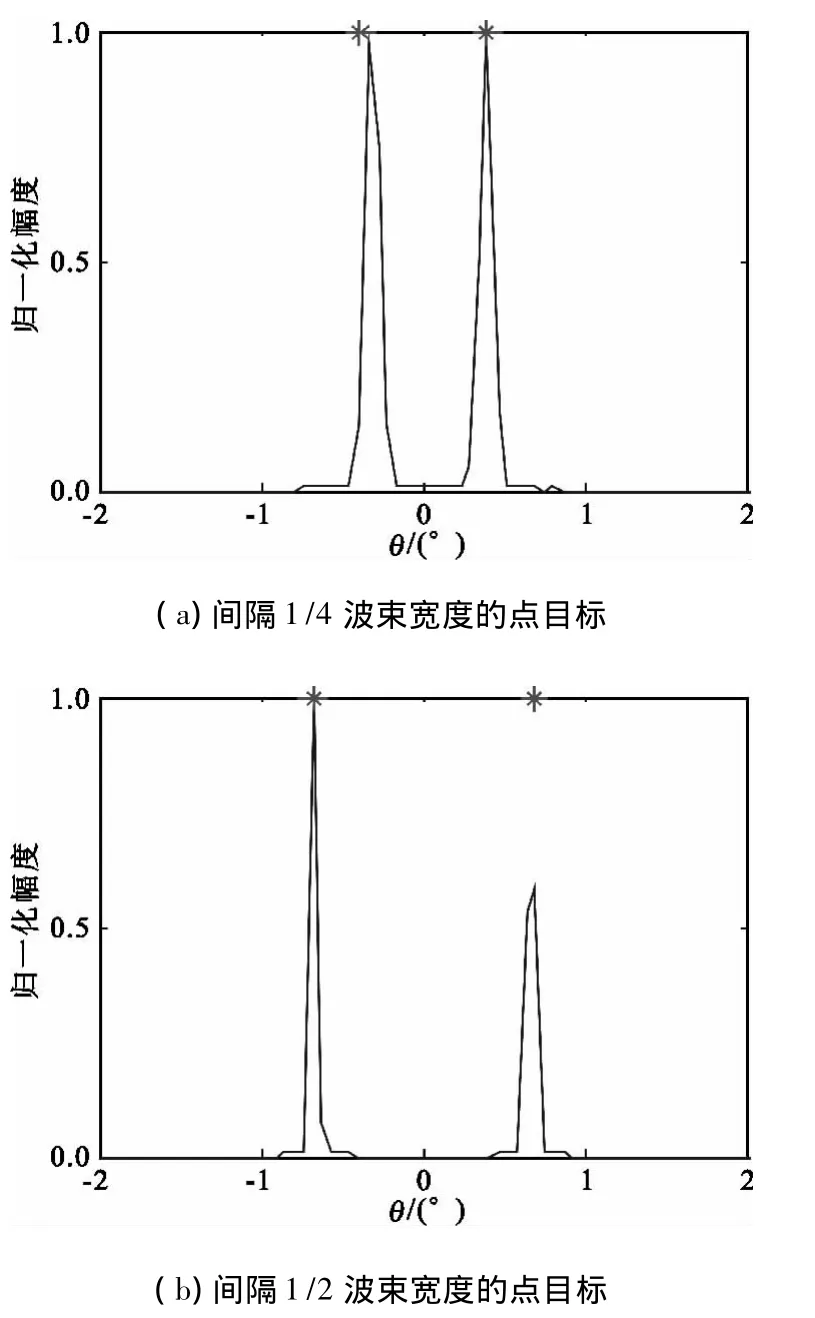
图6 20 dB条件下改进RL算法结果Fig.6 Results of improved RL algorithm with SNR=20 dB
由图3和图5可看出,在噪声存在条件下,利用RL算法进行分辨目标,当两个目标间隔为1/2半功率波束宽度时,噪声对分辨结果没造成太大影响,如图3(b)和图5(b)所示。但是,随着两目标间隔的缩小,噪声会使得分辨结果产生虚假目标,如图3(a)和图5(a)所示。
由图4(a)和图6(a)可看出,在噪声存在条件下,利用改进RL算法能够分辨两个点目标,而不产生虚假目标。与图3(a)和图5(a)相比,改进RL算法在一定程度上,可以降低噪声对分辨结果的影响。由此可看出,改进RL算法可用于高斯噪声条件下的雷达方位超分辨问题的研究。
需要注意的是,由于RL算法受噪声影响,产生虚假目标,导致算法性能不稳定,因此我们用维纳逆滤波算法与改进RL算法相比较,在不同信噪比条件下,两种方法对两个等幅点目标所能分辨的最大分辨倍数(半功率波束宽度/改进RL算法所能分辨的两目标间隔的最小角度)如表1所示。

表1 改进RL和维纳逆滤波算法的分辨性能Table1 Performance of improved RL algorithm and Wiener inverse filtering algorithm
由表1可知,随着SNR值的降低,算法的分辨性能下降。与维纳逆滤波相比,改进RL算法可在低信噪比条件下分辨两个点目标,当噪声为0 dB时,虽然此时能分辨目标,但是由于低频段噪声的影响,使得改进RL算法的分辨精度变差,且有可能出现虚假目标,如何降低低频段噪声的影响还有待于进一步研究。
5 结束语
利用RL算法良好的频谱外推能力对雷达方位超分辨问题进行了研究,主要针对RL算法存在噪声被放大的缺陷,提出一种改进RL算法来降低噪声的影响。初步仿真结果表明,改进RL算法能降低噪声的影响,可用于雷达方位超分辨,与维纳逆滤波相比,噪声适应性更好,具有一定的实际应用价值。但在低信噪比条件下,改进RL算法的分辨性能下降,如何减小低信噪比条件下低频段噪声的影响尚待进一步研究。
[1]Richards M A.Iterative Noncoherent Angular Superresolution[C]//Proceedings of 1988 IEEE National Radar Conference.Ann Arbor,MI:IEEE,1988:100-105.
[2]李惠.实孔径雷达波束锐化算法研究[D].成都:电子科技大学,2010.LI Hui.Research on Beam Sharpening Algorithm of Real Aperture Radar[D].Chengdu:University of Electronic Science and Technology of China,2010.(in Chinese)
[3]Li D Y,Huang Y L,Yang J Y.Real Beam Radar Imaging Based on Adaptive Lucy-Richardson Algorithm[C]//Proceedings of 2011 IEEE Radar Conference.Chengdu:IEEE,2011:14-17.
[4]丁义元,杨建宇,张卫华,等.改进实孔径雷达角分辨力的广义逆滤波方法[J].电子学报,1993,21(9):15-19.DING Yi-yuan,YANG Jian-yu,ZHANG Wei-hua,et al.Improvement of Angular Resolution of Real Aperture Radar Via Generalized Inverse Filtering[J].Acta Electronica Sinica,1993,21(9):15-19.(in Chinese)
[5]单荣光,李士国,朱力.去卷积实现雷达方位超分辨[J].现代雷达,1993(6):25-32.SHAN Rong-guang,LI Shi-guo,ZHU Li.Radar Azimuth Super-resolution Using Deconvolution[J].Modern Radar,1993(6):25-32.(in Chinese)
[6]Zhao K,Wang J G.Improved wiener filter superresolution algorithm for passive millimeter wave imaging[C]//Proceedings of 2011 IEEE Radar Conference.Chengdu:IEEE,2011:1768-1771.
[7]高明哲,祝明波.噪声对维纳滤波反卷积算法性能影响的分析[J].舰船电子工程,2012,32(12):35-37.GAO Ming-zhe,ZHU Ming-bo.Analysis on Noise's Impact on the Performance of Wiener Filter Deconvolution Algorithm[J].Ship Electronic Engineering,2012,32(12):35-37.(in Chinese)
[8]Richardson W H.Bayesian-based iterative method of image restoration[J].Journal of the Optical Society of A-merica,1972,62(1):55-59.
[9]Lucy L B.An iterative technique for the rectification of observed distributions[J].The Astronomical Journal,1974,79(6):745-754.
[10]周昌雄,苏品刚,颜廷泰,等.应用改进自蛇模型和LR算法恢复毫米波图像[J].激光与红外,2012,42(4):468-472.ZHOU Chang-xiong,SU Pin-gang,YAN Ting-tai,et al.Millimeter wave image restoration based on the improved self-snake model and L-R algorithm[J].Laser& Infra-red,2012,42(4):468-472.(in Chinese)
[11]王志明,殷绪成.数字图像处理与分析[M].北京:清华大学出版社,2012:72-73.WANG Zhi-ming,YIN Xu-cheng.Digital image processing and analysis[M].Beijing:Tsinghua University Press,2012:72-73.(in Chinese)
[12]David S,Biggs C,Andrews M.Acceleration of Iterative Image Restoration Algorithms [J].Applied Optics,1997,36(8):1766-1775.
