Riegl VZ-1000 三维激光扫描测量系统在大型露天矿山土石方测量中的应用*
2014-04-14潘纯建杨彦梅万保峰孙道俊
郭 兴,潘纯建,杨彦梅,万保峰,孙道俊
( 云南省地矿测绘院,昆明 云南 650218)
0 引言
地面三维激光扫描测量技术是继GPS 技术以来测绘领域的又一次技术突破,它使测绘数据的获取与处理方法,测绘行业的服务水平等进入了新的发展阶段[1]。三维激光测量为非接触式测量,具有数据获取速度快,实时性强,数据密度大,数据精度高,安全性高等特点,这使得三维激光测量系统在很多工程应用中,具有常规测量技术所不具备的巨大优势[2]。为此,本文以Riegl VZ-1000 三维激光测量技术在大型露天矿山体积计算中的应用为例,对该技术进行研究。
1 Riegl 三维激光测量系统
1.1 技术特点
Riegl VZ-1000 三维激光测量系统采用非接触式快速获取数据的脉冲扫描机制原理,最高扫描速度为300 000 点/s,该激光扫描测量系统最小的角分辨率为0.000 5°(1.8″),在10 m的距离内,激光点密度可达0.1 mm,该仪器最远扫描距离为1.4 km,可在47 s内实现360°(水平)×(30° -130°)(垂直)全景粗略扫描,配合数码全景照相机,可以获取扫描点云的纹理信息。该仪器具有独特的多回波功能,配合内业处理软件,可以基本实现植被和非地面点地物的自动去除,在有植被覆盖及非地面点地物较多区域的测量数据的获取方面,该功能具有明显优势。
1.2 系统组成及原理
Riegl VZ-1000 三维激光测量系统的主要部件包括:激光扫描仪、外置数码全景照相机、专用便携电池和控制器(便携式计算机)等。
三维激光扫描测量技术的主要特点是集成了激光测距系统和激光测角系统,其工作原理是通过仪器内部的激光脉冲二极管发射激光脉冲,射向被测物体表面并产生反射,该反射脉冲由扫描仪内的探测装置接收并记录,可以得到同一激光束发射和接收时刻的时间差T,由此可以计算出扫描点P 到仪器中心的斜距S,同时也可以获取此激光束的水平方向角度α 和垂直方向角度θ,由以上数据即可自动计算出扫描点的相对位置。
扫描点三维坐标的计算原理即极坐标法。三维激光扫描仪有着自身测量坐标系统,如图1 所示,其坐标原点为扫描仪的激光脉冲发射中心,Z 轴为仪器的竖轴,Y 轴为扫描默认起始方位,X 轴与Y,Z 轴垂直并构成空间直角坐标系(右手坐标系),通过这种关系根据点空间直角坐标的计算原理即可计算出以仪器中心为坐标原点的扫描点P 的三维坐标(x,y,z)[3],即:

式中:S 为测距,利用激光发射和接收之间的时间延迟T 来计算,其计算公式为:

式中:C0为光速。

图1 扫描仪三维坐标计算原理示意图Fig.1 Calculation principle schematic diagram of 3D coordinate for scanners
2 应用实例
以云南某测区为例,该测区为某大型露天开采矿山,采用环形阶梯式开采,采剥区地势陡峭,面积大,部分采剥面较为破碎,施工车辆来往频繁,利用常规测量方法施测往往需要投入大量的人力,而且需要耗费较长的时间,并且在人员难以到达,地形破碎的地方想要通过常规测量方法获取较为均匀的数据十分困难,而且还存在人员和设备的安全问题。
2.1 点云数据的获取与处理
本次外业数据采集使用的设备为奥地利生产的Riegl VZ-1000 三维激光测量系统,内业处理采用配套的数据处理软件Riscan PRO(V1.7.9),为了与传统测量数据(采用矿区坐标系)对比,需要将点云数据由扫描仪自身测量坐标系转换为矿区坐标系,扫描仪自身测量坐标系与矿区坐标系可以通过设置在控制点上的反射标靶联系起来,利用反射标靶可以实现点云数据的坐标转换、拼接以对点云数据精度的检核。架设标靶的控制点坐标使用常规方法测量。
2.1.1 数据获取
为测算该露天矿山一个月的采剥土石方量,本次实验分别于相邻两个月的同一时点,对该矿山的采剥面进行了两次扫描作业,考虑到测区的地形条件,为了尽量减少扫描盲区,实现对采剥面进行全覆盖扫描,两次扫描作业均沿着扫描视野较好的采剥面边缘设置测站,每次扫描作业均设置5 个测站,并在测站周围布设了定向标靶和检核标靶,每站扫描时间约15 min,扫描采剥面宽约为840 m,长约1 430 m,面积约为1.2 km2。为了同常规测量方法进行对比,在每次进行扫描作业的同时,也对该采剥面进行了常规测量,且为了避免开采施工影响实验结果,测量期间该采剥面停止开采。
2.1.2 点云拼接与坐标转换
由于5 个测站所采集的点云数据均是以扫描仪自身为坐标原点的独立坐标系,即扫描仪自身测量坐标系,5 个测站的点云数据的坐标是互不相关联的,因此扫描数据采集完毕后,还需要通过Riscan PRO 软件对点云数据进行拼接与坐标转换。
点云数据的拼接可以根据外业测量方法的不同分别采用标靶控制点法(可以任意设置测站,每个测站需要至少3 个标靶),测站后视标靶法(测站点需架设在控制点上,每个测站需要至少2 个标靶,其中1 个用来定向,另外一个用来检核),根据重叠点云进行手动拼接的方法(测站点需架设在控制点上,无需标靶)等3 种方法进行拼接。结合测区的实际情况,本次作业采用测站后视标靶法进行外业数据采集及内业点云数据拼接,拼接时导入已知的控制点坐标,当点云数据拼接完毕,5 个测站的点云数据亦已转换到矿区坐标系中。每个测站的点云数据的坐标转换精度,可以由检核标靶进行检验。
点云拼接与坐标转换误差主要取决于测站点和标靶点的定位精度,拼接转换完成后,经检核标靶检验,点云数据的点位误差和高程误差均能满足测量精度要求。
2.1.3 数据后处理
点云数据拼接完成后,对点云数据进行冗余数据删除,非地面点地物(如植被、构筑物、车辆、浮尘等)过滤,数据重采样、赋色等处理,得到最终的矿山全景点云,如图2 所示。处理后的点云数据应为分布均匀的地表点,以此作为建模点,进行矿山三维建模,生成三角网,并对三角网进行平滑、补洞、细分、曲面拟合等处理后可以得到完整的矿山数字高程模型(DEM)。其模型效果,如图3 所示。
2.2 土石方量计算及结果分析
将相邻两个月两个时间点扫描的点云数据进行上述数据处理后,可以分别得到两个时间点的数字高程模型(DEM),然后利用点云数据处理软件Riscan PRO 将两次模型叠加,即可分别依据三角网算法和方格网算法[4],计算出该露天矿山在一个月的时间内产生的采剥方量,同时可以建立直观的挖方量分布示意模型和填方量分布示意模型。为了验证三维激光测量数据的可靠性,以同期常规测量数据的计算结果为参照,视其为真值,将点云数据的计算结果与其比较。采用三角网算法时,对比结果如表1 所示。采用方格网算法时,对比结果如表2 所示。为满足保密需要,表1、表2 中挖方量和采剥量的前3 位数、较差的前1 位数均以* 号代替。

图2 采矿区全景点云Fig.2 The panoramic point clouds in the mining area
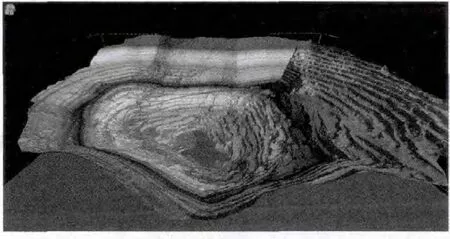
图3 采矿区DEM 模型Fig.3 DEM model in the mining area
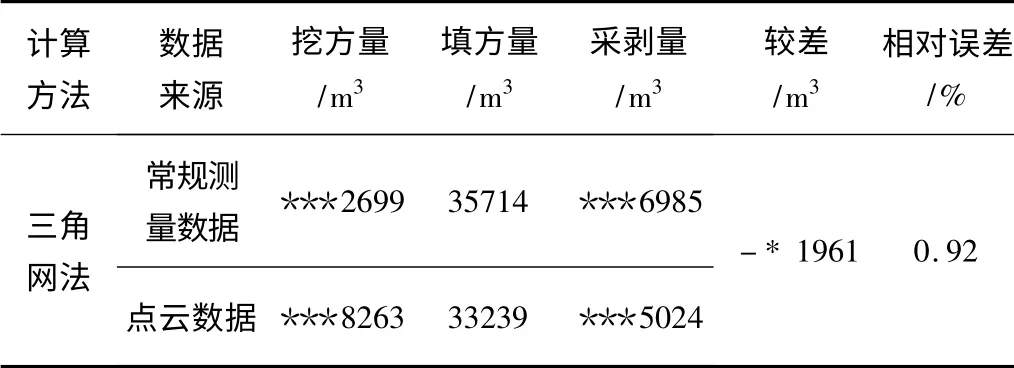
表1 三角网算法计算结果Tab.1 The results calculated by triangulation algorithm

表2 方格网算法计算结果Tab.2 The results calculated by grid algorithm
由表1 可知,采用三角网算法时,点云数据计算结果与常规测量计算结果对比,相对误差为0.92%。由表2 可知,采用方格网算法时,方格网规格分别为10 m ×10 m、5 m ×5 m和1 m ×1 m时,点云数据计算结果与常规测量计算结果对比,相对误差分别为0.32%、0.31%和0.43%,即无论采用那种计算方法,点云数据计算结果与常规测量计算结果的相对误差均小于1%,而且均是点云数据计算结果偏小,这可以与点云数据采集密度高且均匀,依此建立的模型更接近真实地表,计算结果更接近真值的理论互相验证。由此可以证实,三维激光测量系统采集的数据是可靠的,点云数据的计算结果更为精准。
通过本次实例应用对比,可以看出三维激光测量系统在露天矿山土石方量测量中的应用有着常规测量无法比拟的优势和应用潜力,具体如表3 所示。
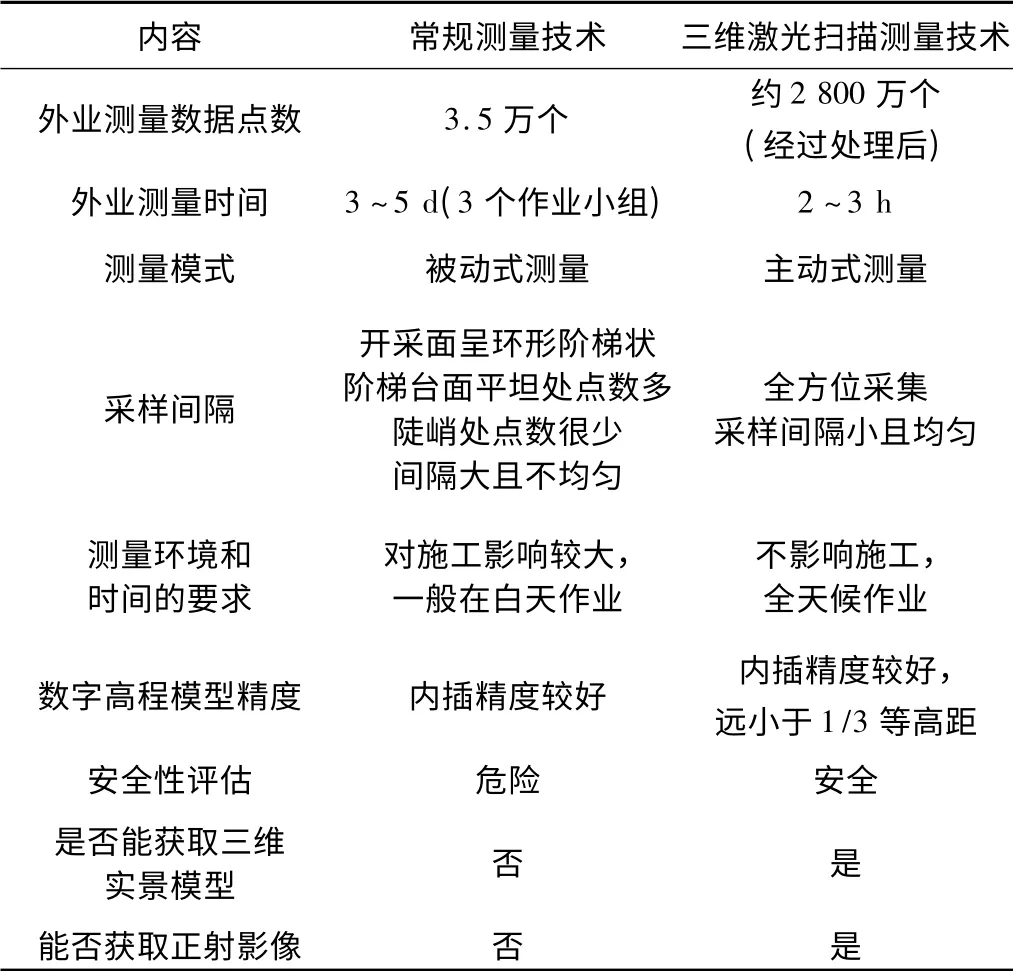
表3 三维激光扫描测量技术与常规测量技术对比结果Tab.3 Comparison of 3D laser scanning measuremert technology with traditional measurement technology
3 结束语
本次应用研究表明,三维激光扫描测量技术特别适宜在地形较为破碎、陡峭,高差较大,植被较少的露天矿山开采区域作业,可以解决危险目标、复杂环境及人员难以到达区域的地形数据采集问题,大幅度提高工作效率,减少外业工作量,减轻测量技术人员的劳动强度,利用配套软件,根据处理后的数据能快速建立矿山数字高程模型模型(DEM),并进行土石方量的计算,其测量精度完全能满足露天矿山土石方测量的要求。
此次的实践应用研究,得到了云南黄金矿业集团股份有限公司,特别是集团公司下属的测绘所的大力支持和帮助,笔者在此谨表感谢!
[1] 徐进军,张民伟. 地面3 维激光扫描仪:现状与发展[J]. 测绘通报,2007(1):47 -50.
[2] 毛方儒,王磊.三维激光扫描测量技术[J]. 宇航计测技术,2005,25(2):1 -6.
[3] 彭维吉,李孝雁,黄飒.基于地面三维激光扫描技术的快速地形图测绘[J].测绘通报,2013(3):70 -72.
[4] 蒋功旺.工程土方量DEM 与方格网计算精度分析[J]. 建材与装饰:下旬刊,2008(4):405 -406.