三维激光扫描技术在建筑立面测绘中的应用*
2014-04-14蒋江生杨元兴
蒋江生,杨元兴
( 浙江省测绘大队,浙江 杭州 310030)
0 引言
三维激光扫描技术在测绘领域中的应用已发展了近十年,它具有快速性、主动性、非接触性、全天候、高密度等传统测绘技术无可比拟的优势,极大地改善了外业测绘的工作环境,提高了工作效率。但由于三维激光扫描技术长期被国外少数大公司所垄断,如Leica、Riegl、Trimble、Optech、FARO 等,导致国内价格昂贵,只有少数测绘单位和大专院校才有能力购买。另外虽然极大地提高了外业测绘的工作效率,但是室内对于海量的点云数据却一筹莫展,无法处理成自己所需要的矢量数据,极大地限制了这项高新技术的普及。
笔者从事Leica 三维激光扫描一年多,经过大量项目实践,认为直接通过点云数据对建筑物进行三维建模是一件非常困难的事情,目前现有软件还无法做到一步到位,且大部分用户还要求提供常规的立面图,所以立面图测绘是三维激光扫描测绘项目中一个极其重要的基础性工作,本文基于Leica C10 三维激光扫描仪和Cyclone 软件及其AutoCAD 插件CloudWorx,通过实例阐述三维激光扫描内外业作业的一般流程,重点阐述在Cloud-Worx 中快速精确绘制立面图的方法。目的是为广大测绘工作者研究和处理点云数据提供借鉴。
1 作业流程
三维激光扫描测绘项目的作业流程与传统测绘作业流程类似,遵循先控制后碎部、先整体后部局、先外业后内业的要求。其作业流程,如图1 所示。
2 外业扫描
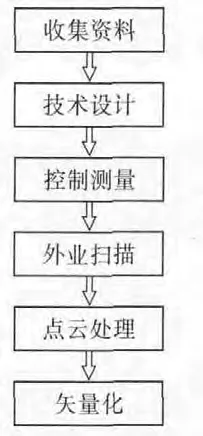
图1 三维激光扫描测量的作业流程图Fig.1 The work flow of 3D laser scanning measurement
各品牌的扫描仪所提供的作业方式不尽相同,但都要经过对中、整平、定向和扫描等步骤。Leica C10 提供了与全站仪一致的观测与定向模式,包括后方交会、已知测站点和定向点坐标、已知测站点坐标和定向方位角等模式。采用这几种模式定向扫描的点云数据可以自动拼接到同一个正确的坐标系下,不需要其它软件进行后期拼接工作。扫描仪支持通过软件和电缆线把控制点坐标批量导入,减少外业工作量,提高工作效率,还避免了人工输入可能带来的错误。
在控制点不足的情况下,Leica C10 扫描仪还提供了多种扩展控制点的方法,如前方交会法、后方交会法以及支导线法。特别是支导线法,由于只要观测一个标靶,所以效率是各种方法中最高的,对于一般的地形、地籍和工程测量,完全满足测绘精度需要,其观测精度大大高于全站仪支导线的精度。
Leica C10 扫描仪提供3 种扫描模式,即粗模、中模和精模。粗模扫描速度最快,只要2 min即可扫描完一个站,但点云的密度比较稀,适用于测土方、矿山等点位密度要求不高的项目;精模扫描速度最慢,需要十几分钟时间,扫描的点位密度可手工设置,最小可以设置为1 mm,适用于古建筑、文物、雕像等建模要求精细的项目;一般普通的项目均采用中模方式进行扫描,5 ~6 min即可完成扫描,点位密度完全满足作业要求。
3 点云处理
点云处理包括点云的拼接、点云的合并、去噪、分割和统一化抽稀,所有这些工作均可在Cyclone 软件中完成。
3.1 点云的拼接与合并
为了全覆盖、全方位测绘一个测区或物体,需要设置多个测站,在各个测站上独立扫描,最终需要把各个测站的扫描数据拼接到一起得到一个完整的数据,如图2 所示。
虽然各测站的点云都拼接到同一数据库内,但各个测站的点云还是一个独立的块,这需要通过Merge 命令进行合并。
3.2 点云的去噪
三维激光扫描所见即所得,视场内所有能反信号的物体均被扫描仪所获得,其中包括大量的项目不需要的点云,统称为噪点,包括行人、车辆、草地、树木以及水面倒影和太阳的光晕。这些点不但增加了数据的容量,还严重影响对地物特征点、线的判别,所以要对点云进行去噪。目前软件还不具备自动去噪的能力,主要是依靠人工通过不断变换视点的方法把不需要的点云删除。在去噪时,视图应设置成正射模式,不能设置为透视模式,这样就不会误删。
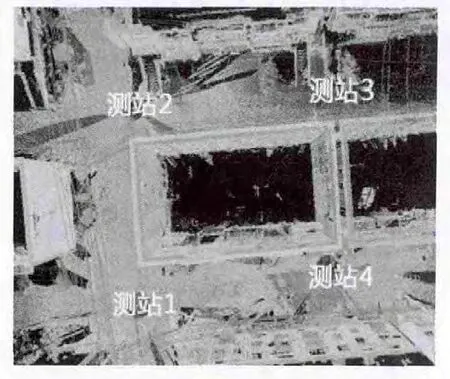
图2 点云拼接Fig.2 Registration of point clouds
3.3 点云的分割与抽稀
虽然经过了点云的去噪,删除了许多无用的噪点,但多站数据拼接后,数据库依然非常庞大,采用粗模方式扫描,每站点云数据在50 万左右;中模方式扫描,每站点云数据在500 万左右;精模方式根据其设置的密度不同,数量不少于5 000万。对于如此庞大的数据量,一般的计算机是没办法处理的。针对这个问题,可采用两种方法来解决,即分割与抽稀。
分割就是把一个大测区分割成若干个小测区,达到减少点云数量、提高计算机运行效率的目的,Cyclone 软件提供了两种方法:第一种通过Segment Cloud 命令把一个完整的点云分割成若干个相互独立的点云块,可对单个块进行编辑和操作,其它块不会参与运算,这样达到提高计算机运行效率的目的;第二种也是最常用最有效的方法,可以把需要的部分点云拷贝到一个新的模板空间中,软件在新模板与原模板之间自动产生链接,在新模板空间中进行编辑和操作点云,不影响原数据库中的点云,但矢量化的图形可自动更新到原数据库中,通过这种方法可以很方便地分割点云,如在建筑立面测绘项目中,就可以以幢为单位,将每幢房屋拷贝为一个模板空间,如图3 所示。
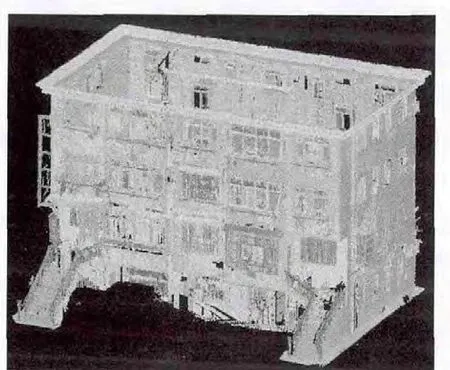
图3 点云分割Fig.3 Segmentation of point clouds
经各站点云拼接后的数据库,许多地方有重复扫描,导致点云密度不均,另外数据库经过一段时间操作后(如去噪、编辑等),计算机运行速度会下降,这时就需要对数据库进行抽稀(统一化)操作。
抽稀就是按照用户的要求对点云密度进行减少,可以达到优化数据库、提高计算机运行效率的目的。如果要在CloudWorx中操作数据库,该数据库必须先经过抽稀(统一化)操作。Cyclone 软件提供了一个Unify Clouds 命令来完成抽稀(统一化)功能,如图4 所示。
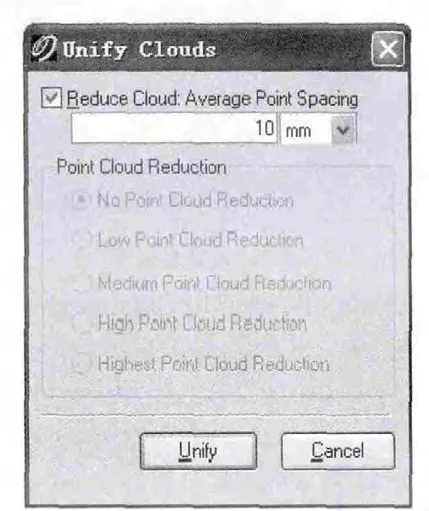
图4 点云抽稀Fig.4 Point cloud reduction
4 CloudWorx 立面绘制
4.1 CloudWorx 介绍
CloudWorx 是Leica 公司开发的一个基于AutoCAD 环境下的插件,使用户在熟悉的作业平台下处理点云,还可以利用AutoCAD 强大的绘图、编辑和三维建模功能。
4.2 立面绘制方法
传统立面绘制方法是外业采用钢尺或手持测距仪或全站仪丈量房屋长宽高,以及东南西北4 个方向上所有门窗的相对尺寸大小,然后内业以每个方向的房屋面作为独立坐标系,根据外业丈量的尺寸在CAD 中绘制出来。基于三维激光扫描技术的建筑立面测绘基本方法和流程与传统方法相似,但比传统方法效率更高、质量更好。
4.3 立面绘制过程
4.3.1 打开点云模板空间
在CloudWorx 插件中可以打开经过分割和抽稀的点云模板空间,使得AtuoCAD 具备了处理上千万点云数据的能力。在打开选项中单位要选择m(Meters),如图5 所示。
4.3.2 建立独立坐标系
对点云模板空间建立独立坐标系是整个立面测绘中最关键的过程,独立坐标系的质量决定了测绘成果的质量。具体步骤如下:
第一步,在三维正视图中做Y 轴的切片,切片的位置选在点云比较稠密、连续处,不宜太厚,一般50 cm 以内;
第二步,在府视图中根据点云画房屋外轴线;
第三步,对轴线进行点云拟合,CloudWorx 提供了一个拟合功能,使拟合后的轴线与切片的中心线重合,如图6 所示;
第四步,用UCS 命令定义轴线坐标系,并命名保存坐标系;
第五步,在视图管理器中,预设视图为相对于刚保存的坐标系。
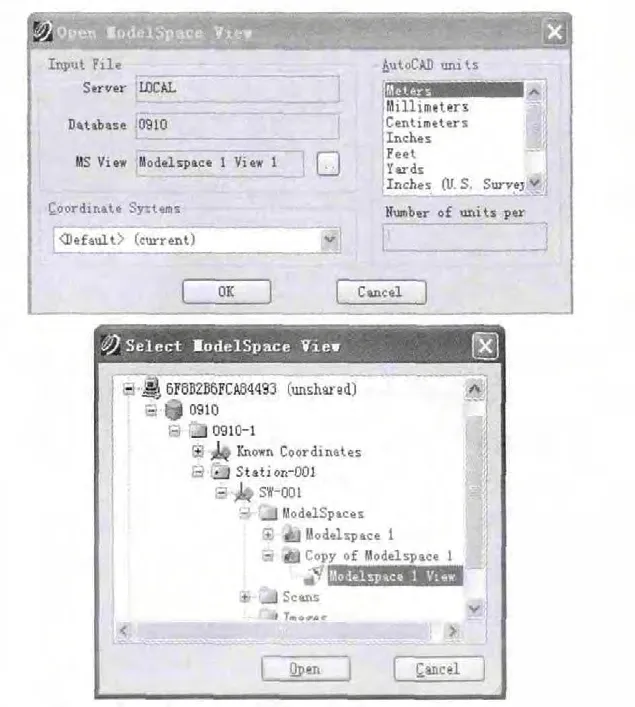
图5 打开点云模板空间Fig.5 Openning of modelspace view of point cloud
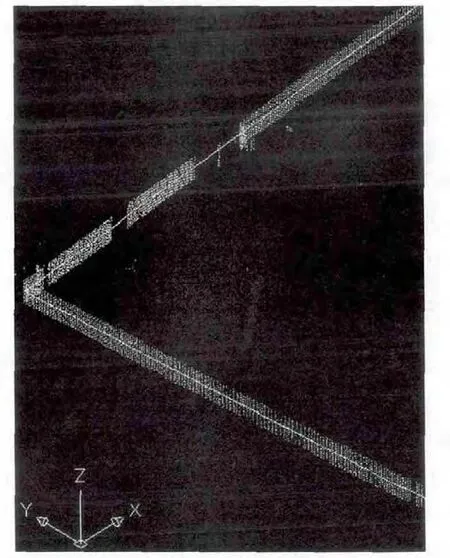
图6 拟合点云Fig.6 Fitting of point cloud
4.3.3 立面切片
由于点与点之间有空隙,在正视图和后视图中,前后的点云会重叠在一起,造成视觉混乱;在左视图和右视图中,也会出现类似的情况。为了消除前后点云对视觉的影响,可以采用切片的方法解决。切片后的立面点云,如图7 所示。
4.3.4 立面图绘制
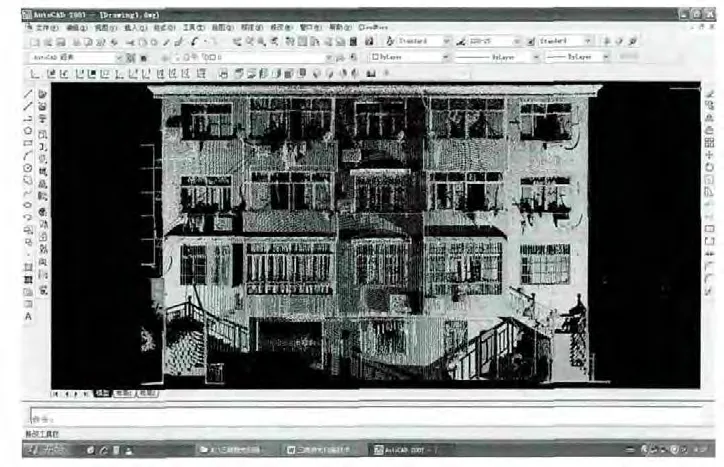
图7 切片点云Fig.7 Cut point cloud
立面切片后所得到的是一张正射影像图,每个像素就是一个带有三维坐标的点云,点云的颜色可以设置成扫描时的反射率和灰度,如扫描时拍摄了彩色照片,也可把彩色照片拟合到三维点云上,使点云具有真彩色,从而提高内业作业员判别特征点、线的能力。
有了立面切片图,内业作业员即可方便直观地根据影像绘制立面图,如图8 所示。
5 结束语
三维激光扫描技术非常适宜于建筑立面测绘,不仅可以提高外业测绘的工作效率,大大减轻外业作业人员的劳动强度和改善外业作业的工作环境,还可以提高内业的工作效率和提高产品的质量,值得推广。
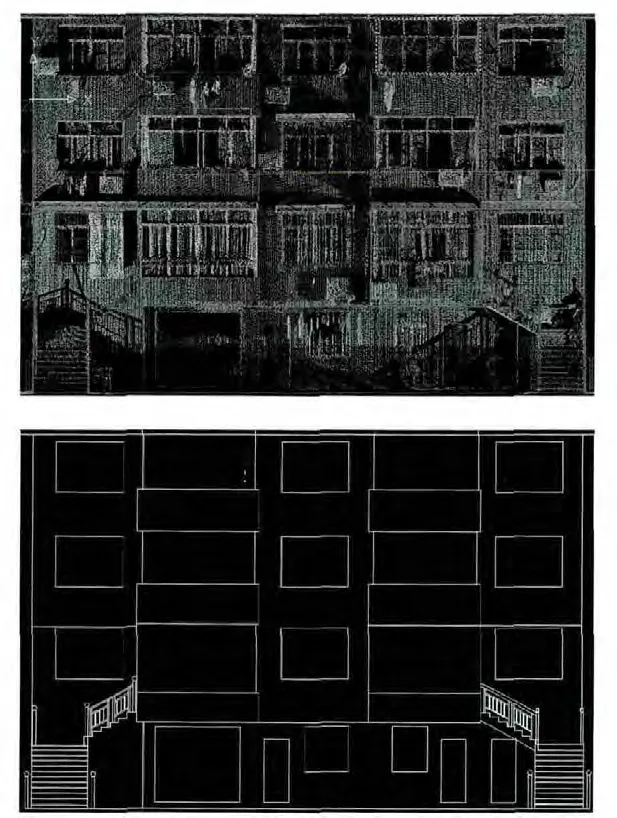
图8 立面图Fig.8 Elevation view
[1] 周俊召,郑书民,胡松,周建波.地面三维激光扫描在石窟石刻文物保护测绘中的应用[J].测绘通报,2008(11):68 -69.
[2] 马立广.地面三维激光扫描仪的分类与应用[J]. 地理空间信息,2005,3(3):60 -62.
