导轨精度检测方法
2013-10-25耿晨刚
耿晨刚
(中国船舶重工集团公司 第713研究所,郑州 450015)
导轨精度检测方法
耿晨刚
(中国船舶重工集团公司 第713研究所,郑州 450015)
提出一种运用激光跟踪仪检测某发射架导轨精度的方法。该方法在分析激光跟踪仪的测量原理基础上,应用激光跟踪仪实现对垂直发射架导轨的检测,给出了详细的检测步骤,最后进行测量不确定度的评定,验证了该方法的有效性和可行性。
激光跟踪仪;发射架;导轨;检测
1.引言
导轨安装精度是某垂直发射系统中的一项重要战术技术指标,不同程度的影响着适装导弹发射时的初始精度,直接决定了导弹攻击目标的杀伤效能。随着导弹发射装置通用化水平不断提升,为满足各种多型武器适装通用化垂直发射装置的需求,发射架物理尺寸的高度最大化设计使得发射架导轨的长度很长,继而导轨最深段距离舰甲板面较远,大大增加了导轨安装精度指标的检测难度。采用普通的光学测量仪器进行精度检测,存在工作条件苛刻、操作过程复杂、测量误差较高等缺点。本文基于激光跟踪仪的测量原理,结合发射架安装精度指标技术特点开展研究,提供出一套行之有效的大型垂直发射架导轨精度检测方案。
2.激光跟踪仪简介
激光跟踪仪是工业测量系统中一种高精度的大尺寸测量仪器。它集合了激光干涉测距、光电探测、精密机械、计算机及控制、现代数值计算等各种先进技术和理论,对空间运动目标进行跟踪并实时测量目标的空间三维坐标。它具有高精度、高效率、实时跟踪测量、安装快捷、操作简便等特点,适合于大尺寸工件配装测量。
影响激光跟踪仪精度主要有以下几种因素:
1)激光跟踪仪的角度编码器随着距离的加大带来的位置误差亦很大,所以跟踪仪本身主要是角度误差;
2)在激光跟踪仪的应用中,靶标对测量精度的影响亦不可忽视,通常靶标外形为球形,内部为3个互相垂直的反射镜(CCR)。若三个发射镜的角点和外球的中心不重合或3个反射镜面相互不垂直都会引起误差;
3)激光本身受大气温度、压力、湿度及气流流动的影响,所以大气参数的补偿对此仪器的正常使用十分关键。
3.案例设置
3.1 检测指标设定
以某型大型发射架为例,设其导轨最深段距离甲板面为7米。发射架导轨安装精度指标主要有发射架导轨相对于发射架安装基座的垂直度误差和平行度误差。精度检测项目见表1所示。
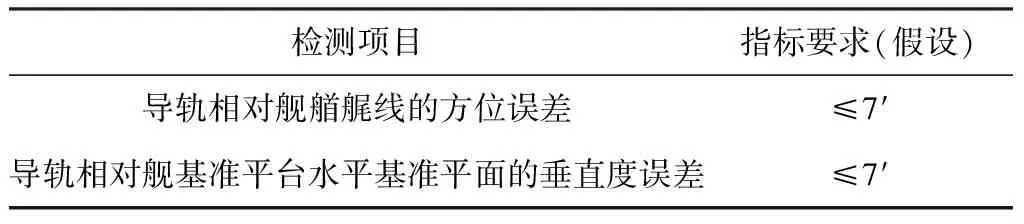
表1 发射架精度检测项目
3.2 选用的检测仪器组成及主要指标
所选用的检测仪器主要由激光跟踪仪、电子倾斜仪和过渡测量平台等组成。检测仪器主要指标见表2所示。
1) 激光跟踪仪
激光跟踪仪主要包括量块、球形测杆、直角靶座、靶球、90°转接头等。它是利用特征点相对于跟踪仪机器原点的水平、垂直角度及距离来计算特征点空间位置坐标。通过特征点坐标值构造直线、平面等特征元素,实现线性尺寸、形位公差的测量。
2 )电子倾斜仪
电子倾斜仪可对大地水平度进行测量,主要实现舰基准平台基准的转换。
3 )过渡测量平台
过渡测量平台的功能是模拟舰基准平台。
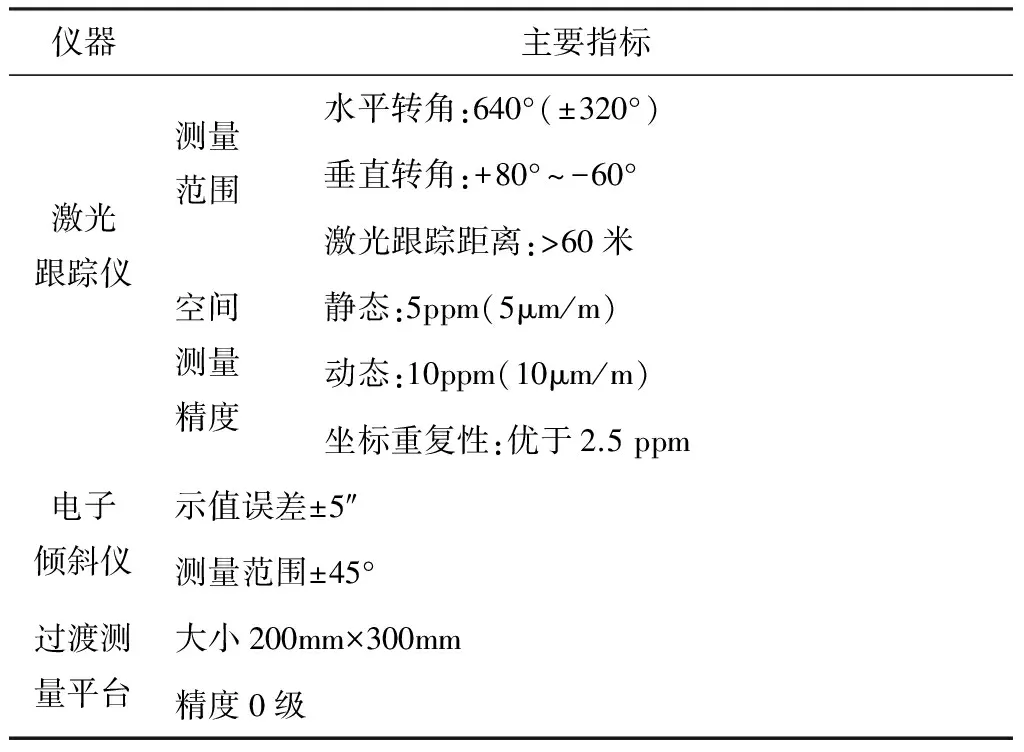
表2 检测仪器主要指标
3.3 检测环境要求
发射架导轨安装精度检测工作通常在武器系统安装载舰阶段实施。测量时机选择当发射架安装到位,并与船体之间完成连接和焊接之后。
根据检测仪器的性能和导轨精度指标的精度要求检测作业处于以下环境:检测应于日落后3小时至日出前1小时或阴天时进行;环境温度要求5℃~40℃;测量时其他人停止作业;船体基准横倾应在3′以内,纵倾应在2′以内;船体在坞内,处于半坐墩状态;测量面需光滑,无多余物。
4.检测方案
4.1 检测原理
本方案主要是利用倾斜仪和过渡测量平台将舰基准平台转换到弹库表面上,然后用激光跟踪仪对过渡测量平台、艏艉线、艏艉线垂直线及导轨等特征点进行测量,利用各特征元素建立坐标系,实现垂直度、平行度的测量。
4.2 检测具体流程
4.2.1 准备
用电子倾斜仪测量出舰基准平台横向和纵向倾斜角度值;
将过渡测量平台放置弹库表面上,并保证与激光跟踪仪激光头之间无光线阻挡,平台中心线与舰艏艉线基本处于同一铅垂面上,用倾斜仪测量平台横向和纵向角度值,并调整使得平台中心线与舰基准平台之间夹角满足不大于0.5°条件;
打开发射架被测量隔舱舱口盖,将激光跟踪仪机头通过90°转接头安装在三脚架上并放置在隔舱口上端,确保隔舱被测导轨测量面均在激光跟踪仪激光可达范围内,连接激光跟踪仪控制器,加电预热激光跟踪仪机头,固定三脚架。
4.2.2 测量
用激光跟踪仪测量过渡测量平台上表面(平面P),测量点应在平台大面分布,点数不少于9点,平面度小于0.09mm时,平面特征可接受。
用激光跟踪仪球形测杆测量出弹库表面舰艏艉线及与艏艉线垂直的中心刻线4个特征点的坐标值,如图1所示:
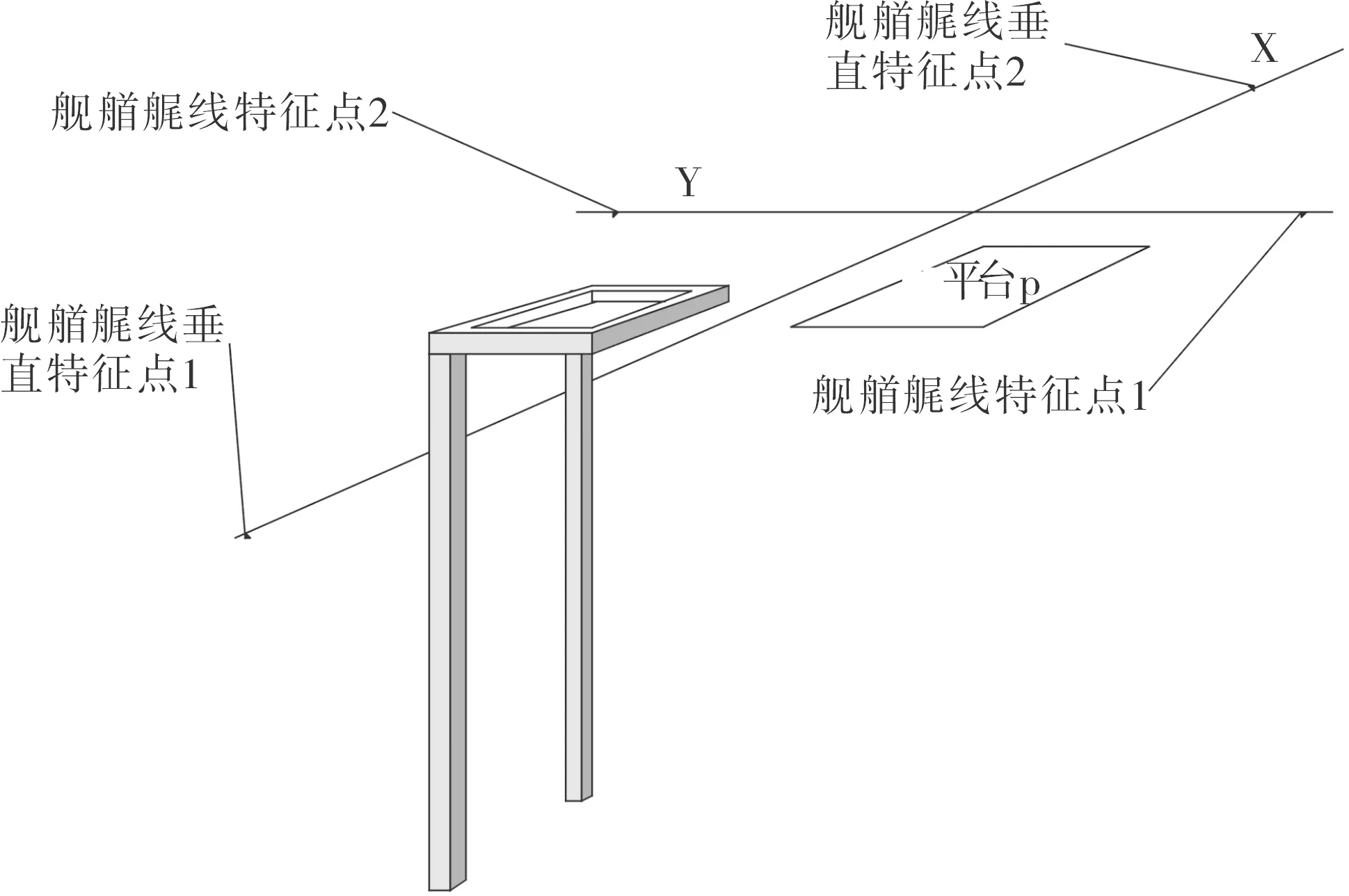
图1 特征点设置示意图
将4个特征点,投影至平面P,用与舰艏艉线垂直的中心刻线投影点构造直线L1,舰艏艉线投影点构造直线L2;
以平面P的法线方向为Z轴,直线L1方向为X轴,L1与L2交点为原点建立坐标系;根据舰基准平台与平面P之间的夹角,对坐标系进行旋转,使Z轴与舰基准平台法向重合;
用激光跟踪仪球形测杆测量出船体前舰艏艉线2个特征点,以2个特征点的方向对坐标系的X轴进行旋转,使X轴方向与舰艏艉线方向重合;
在导轨轨面上取两个测量点,在测量点处放置一标准量块(量块应紧贴正交轨面,见图2),将靶座和靶球放置到测量点处(靶座应紧贴量块侧面和轨面,见图2)。通过激光跟踪读取定位导轨各测点处的X和Y坐标值。
4.2.3 计算
发射架导轨方位精度等于处于同一高度导轨左、右两侧的两测量点处Y坐标值差,X方向导轨垂直度等于同侧上、下方导轨的两个测量点处X坐标值差,Y方向导轨垂直度等于同侧上、下两定位段导轨测量点处Y坐标值差。
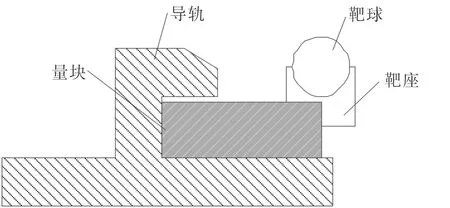
图2 量块布置示意图
5.测量不确定度评定
5.1 垂直度测量不确定度评定
5.1.1 测量方法
垂直度测量是利用舰基准平台和舰艏艉线为基准建立坐标系,然后测量导轨的位置来计算垂直度,垂直度不确定度来源于舰基准平台水平度测量误差、过渡测量平台水平度测量误差(倾斜仪测量)、过渡测量平台测量误差(激光跟踪仪测量)及导轨位置测量误差。
5.1.2数学模型
E=S1-S2+S3+60tan-1{(A-B)/2000}
(1)
式中:E—垂直度;S1—舰水平基准平面纵向或横向水平度;S2—过渡测量平台纵向或横向水平度;S3—过渡测量平台激光跟踪仪测量平面角度偏差;A—侧导轨位置1的X或Y坐标;B—侧导轨位置2的X或Y坐标;2000—位置1到位置2距离(估算值);60—度转换分。
5.1.3方差和传播系数
各输入量彼此独立不相关,合成标准不确定度u由下式得
(2)
式中:f—垂直度与各分量的函数关系;u(xi)—各分量的标准不确定度。
依上式可知,
u2=C2(S2)μ2(S1)+C2(S2)μ2(S2)+
C2(S3)μ2(S3)+C2(A)μ2(A)+C2(B)μ2(B)
(3)
其中:C(S1)=C(S2)=C(S3)=1;C(A)=C(B)=60/2000=0.03。
5.1.4计算分量不确定度
1)舰基准平台角度引入的标准不确定度分量u(Si)

2)数据A、数据B引入的标准不确定度分量u(A)、u(B)
5.1.5合成的标准不确定度分量u
标准不确定度如表3所示。
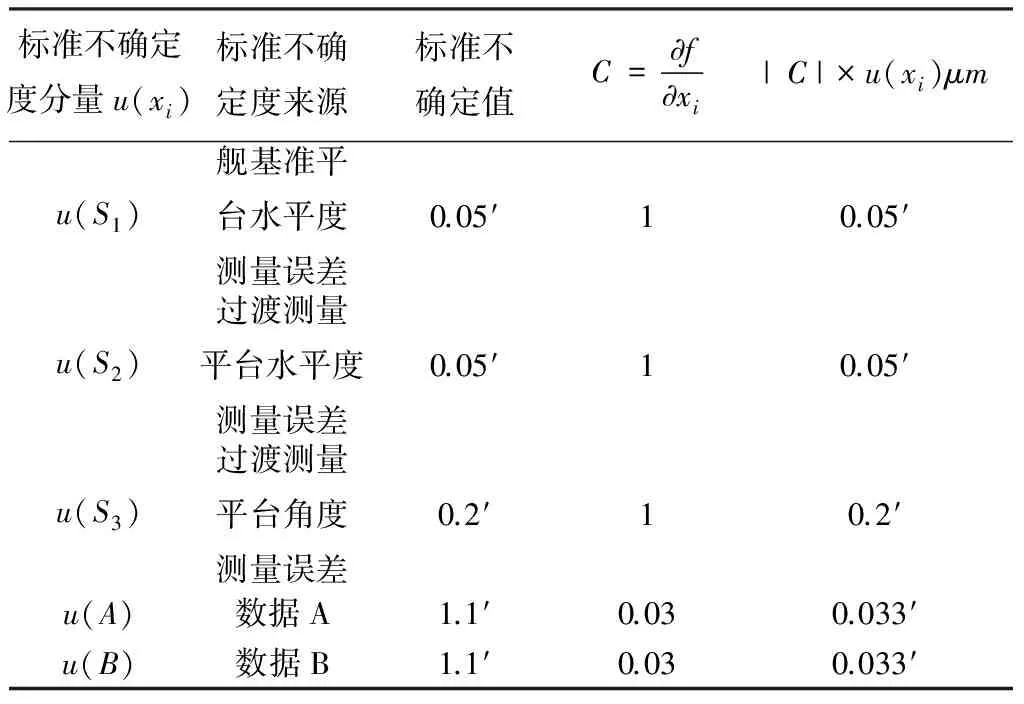
表3 标准不确定度一览表
各不确定度分量独立不相关,则:
u2=C2(S1)μ2(S2)+C2(S2)μ2(S2)+
C2(S3)μ2(S3)+C2(A)μ2(A)+C2(B)μ2(B)
(4)
其中:C(S1)=C(S2)=C(S3)=1;C(A)=C(B)=60/2000=0.03u=0.22′。
5.1.6扩展不确定度

(5)
k=2,k一般取2。
5.2 平行度测量不确定度评定
5.2.1测量方法
平行度测量是利用平面P和舰艏艉线为基准建立坐标系,然后测量导轨的位置来计算平行度。平行度不确定度来源主要来源于舰艏艉线测量误差和导轨位置测量误差。
5.2.2数学模型
平行度F=W+60tan-1{(C-D)/600}
(6)
式中:F—平行度;W—舰艏艉线测量角度偏差;C—导轨左位置的Y坐标;D—导轨右位置的Y坐标;600—导轨左位置到右位置距离(估算值);60—度转换分。
5.2.3方差和传播系数
C2(D)μ2(D)
(7)
其中:C(W)=1;C(C)=C(D)=0.1,
5.2.4计算分量不确定度
1)舰艏艉线引入的标准不确定度分量u(W)
2)数据A、数据B引入的标准不确定度分量u(C)、u(D)
5.2.5合成的标准不确定度分量u
标准不确定度如表4所示。
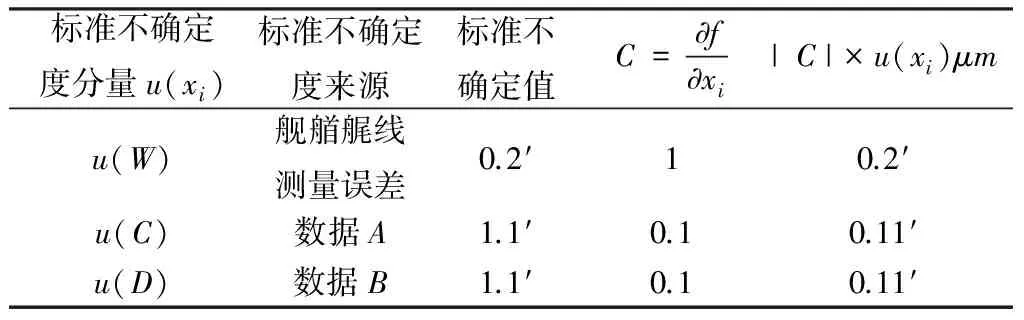
表4 标准不确定度一览表
各不确定度分量独立不相关,则:

(8)
5.2.6扩展不确定度
(9)
k=2,k一般取2。
6.结束语
通过对利用激光跟踪仪检测发射架导轨精度方案的阐述,以及对测量方法不确定度的评定计算可知,该检测方案简单、易行,检测精度高,满足设例的发射架精度测量要求。本测量方案是基于舰船静止环境的精度检测,而如何实现海上动基座条件下垂直发射架的各种状态参数检测则是一项需要我们深入研究的课题。
[1]叶德培.测量不确定度[M].北京:国防工业出版社,1996.
[2]温俊铭.空间角度计算[M].北京:国防工业出版社,1978.
[3]甘永立.形状和位置误差检测[M].北京:国防工业出版社,1995.
GuidePrecisionDetectionMethod
GENG Chen-gang
(The 713 Research Institute of CSIC,Zhengzhou 450015,China)
By a method to detect a launcher guide precision laser tracker.Base on analyzing the measurement theory of the laser tracker system,the method actualizes the checking of vertical launcher rail,and put forward the particular steps of back-check.At last,the article gets an evaluation of uncertainty measurement to validate the validity and feasibility of this method.
laser tracker system;launcher;rail;check
P258
A
1008-3715(2013)05-0122-04
2013-07-25
耿晨刚(1970—),男,河南安阳人,中国船舶重工集团公司第713研究所工程师,从事机械设计研究。
(责任编辑赵冰)
