施工现场火灾智能化预防方案研究
2013-08-30徐秀杰任国智谈旭杰
徐秀杰,任国智,谈旭杰
(1.山东建筑大学管理工程学院,山东 济南 250101;2.莱州市建筑科学研究所,山东 莱州 261400;3.济南沃尔电子有限公司,山东 济南 250108)
0 引言
近年来,我国的建筑施工现场火灾事故频频发生,给人民生命财产带来了巨大的损失。目前,仍没有实现对施工现场火灾隐患的有效控制。单纯的起火判定可以采用烟感或视频图像处理的方式[1],但这些方法并不适用于施工现场火灾预防,施工过程中的用火并不一定会引发火灾。从施工现场火灾起因来看,电气、用火不慎是火灾频繁发生的主要直接原因。这就需要在使用电、火、热源设备时与施工区域的可燃物保持一定的安全距离,或需采取相应防护措施,如对可燃物覆盖耐火隔离罩、焊接时下方使用接火盆等。由于电、火、热源经常需要移动使用,使用者在忙碌中可能会疏忽与可燃物的距离。因此,自动感知获取移动火源设备的当前位置,借助虚拟现实技术智能判定与可燃物的安全距离,排除了人工判定的不可靠性,对施工火灾预防具有一定的应用价值。
定位感知无线目标节点的位置是物联网智能环境的一个重要组成部分。利用无线信号定位在通信和导航领域受到了广泛的关注。文献[2]中通过双频GPS(Global Positioning System)接收机对水库大坝的各个监测点进行监测,获得水平及垂直位移量可以达到毫米级的精度,从而可对大坝的较大变形进行预警。但GPS定位仅适用于无遮挡的环境,且用户节点通常功耗大,成本高,不适用于低成本自组织的无线网络。
射频识别RFID(Radio Frequency Identification)技术在无线通信领域中已经成为一个有用的通用技术,获得了相当的关注。RFID系统可用于目标对象感知定位,它通常是通过部署若干RFID标签和/或读者在固定位置,根据测得的各固定节点与目标对象间的距离计算其位置[3]。
虚拟现实技术目前都已经相当成熟,但主要应用于娱乐、效果展示及培训等。也有部分文献将虚拟现实应用于解决实际问题,文献[4]提出了三维激光扫描技术在古建保护中深层次的应用,将扫描结果用于逆向重建、模拟修复;文献[5]通过开发的行人过街行为虚拟实验系统对大连路与飞虹路交叉口的实验分析,判定出等待时间过长是诱发行人违章的重要因素,因而需要缩短信号周期和行人等待时间,减少行人违章过街的概率。然而将RFID定位技术和三维虚拟现实技术相结合用于解决实际移动节点与大体积物体之间的距离问题在现有文献中尚不多见。
1 火灾预防总体架构方案
在施工现场,可移动火源设备相对较小,其位置可以用三维坐标点表示,采用RFID的定位算法是计算定位目标节点的三维坐标是可行的。而可燃物通常体积较大,如施工中的保温层、堆积的木料等,占据较大空间,仅以一个坐标点不足以标识其位置。为了实现使用中的火源设备与可燃物之间保持安全距离的自动判定,提出了RFID移动目标定位与虚拟现实场景实现碰撞检测相结合的方法。在服务器上对现场的可燃物进行快速的三维建模,同时也要实现对各类火源设备的建模,火源设备的建模要包括其最大热辐射区域。所有模型导入虚拟场景,通过RFID技术实时定位移动火源设备位置坐标并更新虚拟场景中模型的位置,通过碰撞检测保证火源设备移动使用时一旦与可燃物突破安全距离,立即产生警报信息通知相关人员采取措施预防火灾发生。
火灾预防总体架构方案由施工现场的多个RF节点及上位机服务器组成(如图1所示)。图中目标节点即为可移动的火源设备,参考节点用于辅助目标节点定位,服务器中间件用于实现计算机与现场通信接口及数据处理,虚拟场景为施工现场在计算机中的虚拟再现。

图1 火灾预防系统总体架构
2 移动火源设备定位实现方法
RFID是一种基于电磁信号检测和无线传感器技术,一个典型的RFID系统包括两个基本的组件类型:读卡器Reader和标签Tag,Reader能够按照要求读取Tag的信息,读取距离取决于输出功率和射频强度。目标定位是RFID系统的最重要的应用之一[3]。
2.1 基本二维定位方法
定位技术一般利用接收无线信号的各个指标进行定位,最传统的度量方式是基于测量多个参考点接收信号的到达角度(AOA)、到达时间(TOA)、到达时间差(TDOA)或接收信号强度(RSS),应用最为广泛且易于实现的是基于 RSS。有名的LANDMARC系统是一种基于有源RFID技术的二维动态定位识别系统,基于最近邻居定位思想,在地表部署若干位置固定的参考Tag作为辅助定位基准,使用的Reader可以提供多个等级的信号强度,通过比较Reader测得目标Tag与邻近参考Tag的场强值匹配程度来对目标Tag进行定位[2]。
因为实际测量环境的复杂性,不同时刻不同条件测量出的同一位置RSS总会有差异,换算出的锚节点到目标节点的距离也必然不够精确,尚需要采取一些措施进行修正。在二维平面中的定位精度问题已被广泛研究,如三角剖分中的近似点测试法(APIT)、基于RSSI的三角形质心定位算法、最小二乘优化的对象位置估计算法等[6-7]。这些算法在二位平面中已经可以得到相当高的定位精度。
2.2 三维定位实现
由于施工过程并不仅限于地表,必须要实现三维空间的定位。目前,在三维空间中的相对定位也开始受到广泛关注。文献[8]首先通过建立在部署区域基于有源标签Tag的稀疏三维标签阵列及两个带有两个天线的读卡器Reader,然后由各Reader收集初始化系统后的射频信号强度及其ID号,进一步由线性插值算法得到虚拟的稠密阵列射频信号的强度分布及其对应的各Tag的ID号和坐标信息存入与Reader相连服务器的数据库。附着有源标签的移动火源对象在三维区域的坐标轨迹可以通过每一时刻的信号强度去检索数据库,得到目标对象可能所在网格的坐标,然后多个Reader的结果进行统一得到唯一网格,最后使用一个简单而有效几何平均计算得到目标对象位置坐标。文献[9]类似地部署若干Tag,但依据Reader部署的不同方式及目标对象附着tag或Reader又提出了三种不同方案。文献[10]基于RSSI的计算距离进一步定位基础上提出了用梯度下降法提高定位精度。RF传输距离主要受到发送功率和信号频率的影响,考虑到施工现场的工作区域的变动性,需要选用有源Tag和较高的带宽实现远距离信息传输。
RF节点通常具有受限的感知、通信和计算能力,为加强实时性,从信号强度到距离再到坐标的计算可以迁移到服务器上完成。同一时间可能会有多个火源设备处于移动使用状态,也就是有多个移动目标节点,为避免同时发生信号的碰撞,可以采用划分时间片的方式轮流发送。在允许的时间周期上,服务器中间件读取测距信息,轮流计算每个目标对象的定位坐标,这样就可以确定每个目标对象的粗糙移动轨迹或是否还存在与施工现场。
3 移动火源设备与虚拟场景的交互
3.1 三维模型构建
根据条件及需求,三维模型构建可以采用不同的方法。基于Strata Foto 3D三维重构的原理可以实现快速的建模,首先对施工场景中各火源对象及可燃物对象选择从不同的角度拍摄连续的平面图像,并根据要建模物体的不同,使背景颜色与建模对象颜色对比明显,便于后期影像合成中的处理。然后将连续拍摄的图片导入Strata Foto 3D中进行算图,根据图片中建模对象的形状和颜色,完成建立线框、遮罩等处理,进而实现平面影像向立体影像的转换[11-12]。构建的三维模型可以用3ds的格式保存,最后可以导入到3dsMax,对模型做进一步修正。另外,也可导入到BIM中完成施工场景中各火源对象及可燃物对象的构建[13]。对所有实体可拍摄对象完成建模后,还要根据各类火源的扩散范围建模,将所有移动火源设备在根据实际使用时的最大的扩散范围大小建模,针对加防护或未加防护措施时扩散范围的完全不同,采用不同的三维模型,默认状态下使用未加防护的最大的3D模型,在实际运行过程时根据是否添加了防护措施动态调用不同模型。若条件不具备,也可以通过测量建立粗糙的简单模型,只要模型的范围能包容要建模对象,也可达到系统的需求。
所有静态模型构建完毕,还需要实现场景中的漫游移动及实时碰撞检测,这时可以将所有模型导入到Unity 3D场景。Unity 3D作为一款成熟的游戏引擎,在Windows平台调用Direct3D高度优化的图形渲染,能够利用低端硬件流畅的运行虚拟场景,快捷的实现场景的交互漫游及碰撞检测。由于在场景中会出现多个不同ID的相同火源设备,可以对所有三维模型采用Instantiate(实例化)、Prefabs(预制)方式,只需建立一个Prefabs原型,程序运行时,动态Instantiate多个Prefabs对象。这样也方便将来添加相同设备,只需通过界面交互方式新的实例对象。
3.2 移动火源设备扩散区与可燃物碰撞检测
碰撞检测算法可以从时间和空间的角度进行划分,按照是否考虑时间参数可以分为连续碰撞检测和离散碰撞检测两类,按照空间结构的碰撞检测算法又分为层次包围盒检测(如 OBB、Sphere、AABB盒)和空间剖分(如BSP树)检测的方法,其中层次包围盒检测算法以其高效的特征应用更为广泛[14-15]。当前流行的游戏引擎一般都是基于层次包围盒的碰撞检测算法,包围方式分为多种,不管采用哪种包围体,代码结构都是类似的。Unity 3D也是采用了层次包围盒的碰撞检测方式,具有较好的检测精度。Unity 3D包括一般的刚体之间碰撞和范围触发碰撞检测两类,前者要求碰撞双方都是刚性的Collider(碰撞体),后者也要求双方是Collider,同时被撞的一方还要开启is trigger属性,另外每一类从时间上都分为三种状态:开始接触到其他Collider、持续接触其他Collider、停止接触其他Collider。用于实现碰撞检测的函数主要有:OnCollisionEnter()、OnCollisionExit()、OnCollisionStay()和 OnTriggerEnter()、OnTriggerExit()、OnTriggerStay()。
在Unity 3D中,为了实现导入模型的碰撞,应首先将所有的三维模型对象添加Collider并设置为刚体RigidBody。然而,从BIM或3ds Max导入的场景对象模型结构较复杂,开始并没有产生Collider包围盒,手工创建Collider较为复杂且不精确,可以在Project中选中场景模型,在 Inspector中勾选Generate Colliders,应用即可生成模型所需的网格碰撞器(Mesh Collider)
对于某一可燃物模型A,其对应碰撞检测测试例程如下:
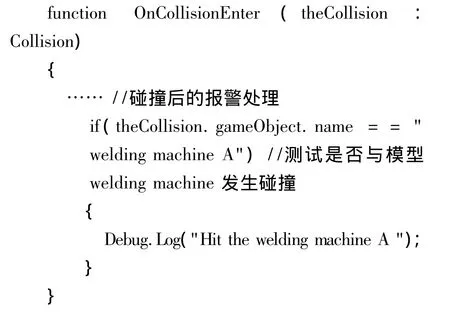
theCollision.gameObject.name 表示当前突破了与可燃物模型A的安全距离那个移动火源设备模型名称。
只有移动对象才会出现碰撞,虚拟场景中对象的移动是实际火源设备的实时反馈,通过周期性判定采集一系列RFID的RSSI计算火源所得坐标是否发生变化,若有变化,对应只需每次将目标对象移动到所求新坐标点位置。实现代码如下:

场景中实际移动的目标对象可能有多个,需要在主场景中轮流遍历所有可移动对象获取新的坐标点。
3.3 碰撞结果反馈
一旦虚拟场景中检测到碰撞,可认定对应移动火源设备与可燃物之间突破安全距离,服务器端应给出警告信息,并立即发送警报信息给移动火源设备附近的Reader,由其通知智能模块给出闪灯或者语音提示,如“请注意:附近有可燃物”。警报发出后,若操作员采取了对应措施,应通知服务器修改虚拟场景状态变为不再碰撞。如操作员在正要使用的焊接机下方增加了接火盆,对应虚拟场景模型要做Scaling(缩放)变换,大模型变为小模型,碰撞不再出现。若是对当前可燃物做了隔离处理,可采用Unity 3D分层碰撞策略,暂时将场景中可燃物模型的移入其他层,撤掉隔离后再恢复到与火源设备同一层次。
如果要完全实现上述的智能化判定,必须在施工现场另外增加智能化模块,使现场操作员能够输入哪个ID号设备针对哪个可燃物做了何种预防措施,通过无线网络传送信息到服务器,修改场景中各模型状态使得采取预防措施后自动中止警报。若考虑到系统实现成本,也可不增加硬件,由操作员通知信息员基于页面交互方式对模型对象状态做出修改,这样信息员将不可远距离维护页面,随时需要根据反馈信息维护虚拟场景状态,增加了人力成本。
4 结语
通过对现有技术的研究与融合,提出了对施工现场火灾预防的RFID技术与虚拟现实相结合的智能化解决方案,基于对火源设备扩散范围进行建模的设想可以实现以碰撞检测方式对火灾的预警,并全面分析了其可行性。这一方案的实施,可以进一步扩展出更多的应用。比如施工现场每个员工佩戴RFID卡,定位员工当前位置及是否离开施工现场等,也可以给现场所有非可燃材料及非火源设备进行标识,提高管理效率及安全,有效监测材料和施工设备的位置。对于服务器端,可以构建整个施工工程进度的虚拟模型,嵌入Web页面,便于业主或领导远程了解工程施工进度。
[1]Rinsurongkawong S.,Ekpanyapong M.,Dailey M.N..Fire detection for early fire alarm based on optical flow video processing[C].Electrical Engineering/Electronics,Computer,Telecommunications and Information Technology (ECTICON),20129th International Conference.2012:1 -4.
[2]杨福秋,张月珍,温纪康,等.GPS静态定位在大坝变形监测中的应用[J].山东建筑大学学报,2009,24(5):482-487.
[3]Ni L.M.,Liu Yunhao ,Lau Y.C.,et al.Landmarc:indoor location sensing using active RFID[J].Wireless Networks,2004,10(6):701 -710.
[4]丁宁,王倩,陈明九.基于三维激光扫描技术的古建保护分析与展望[J].山东建筑大学学报,2010,25(3):274-276.
[5]孙剑,杨燕,李克平,等.信号控制交叉口行人过街行为虚拟实验[J].同济大学学报,2011,39(5):682-687.
[6]Bulusu N..GPS-less low-cost outdoor localization for very small devices[J].Personal Communications IEEE,2000(7):28 -34.
[7]彭鑫,李仁发,杨柳,等.基于最小二乘优化的车辆位置估计算法[J].通信学报,2010,31(8):10 -15.
[8]Han Jinsong,Zhao Yiyang,Yan Shuncheng,et al.Improving accuracy for 3D RFID localization[J].International Journal of Distributed Sensor Network,2012:1 -9.
[9]Maneesilp,Wang Chong,Wu Hongyi,et al.RFID support for accurate 3-dimensional localization[J].IEEE Transctions on Computers,2012:1 -14.
[10]Chien H.K..RFID 3D location sensing algorithms[J].Automation in Construction,2010,19(5):588 -595.
[11]Kashihara K..Three-dimensional reconstruction of artifacts based on a hybrid genetic algorithm[C].Systems,Man,and Cybernetics(SMC),2012 IEEE International Conference.Oct.2012:900-905.
[12]段金荣,胡玉萌,刘凯,等.鱼类标本及标本馆场景三维演示系统的研发[J].南方水产科学,2013,9(1):63 -67.
[13]Shen Zhigang,Jiang Landu,Kevin G.,et al.Creating 3D webbased game environment using BIM models for virtual on-site visiting of building HVAC systems[C].Construction Research Congress 2012@ASCE ,2012:1212-1221.
[14]马登武,叶文,李瑛.基于包围盒的碰撞检测算法综述[J].系统仿真学报,2006,18(4):1058 -1064.
[15]朱元峰,孟军,谢光华,等.基于复合层次包围盒的实时碰撞检测研究[J].系统仿真学报,2008,20(2):372-377.