四杆机构“死点”位置及其应用的再探讨
2013-08-16郭平
郭 平
(西安铁路职业技术学院 机电工程系,陕西 西安 710014)
0 引言[1]
“死点”问题是平面四杆机构的基本特性之一,它与构件的运动和受力等情况密切相关。如果机构中出现“死点”位置问题,将出现整个机构“卡死”的现象,而且从动杆件转动方向也不能确定,对传动不利,应该加以排除。本文主要从平面四杆机构“死点”的定义、位置的判断,“死点”位置的排除以及“死点”位置在工程机械上的应用等几个方面,结合实际加以初步研究和讨论。
1 机构“死点”位置分析
1.1 机构“死点”的定义[2]

图1 机构死点
图1所示的曲柄摇杆机构ABCD,如不考虑各构件的重量和摩擦力,则连杆BC为二力杆。当摇杆CD为主动件,在曲柄与连杆共线位置AB1C1D、AB2C2D中,主动件摇杆CD通过连杆BC作用于从动件曲柄AB上的力正好通过转轴中心A,此时源于连杆的驱动力对从动件曲柄AB的转动力矩为零,不论连杆BC对曲柄AB施加多大的作用力,都不能使AB杆转动,整个机构处于静止状态,且转动方向也不能确定。也就是说,曲柄AB在回转一周的过程中,有两次与连杆BC共线,此时传动角r=0,压力角θ=90。摇杆CD分别处在两个极限位置:C1D、C2D,此时位置称为机构的“死点”。
1.2 几种状态下的“死点”位置[3]
设:曲柄 AB=a,连杆 BC=b,摇杆 CD=c,机架AD=d。图2a中,连杆BC为最长杆,则曲柄摇杆机构ABCD存在的条件是:a+b≤c+d,摇杆CD为主动件,则两个“死点”位置为AB1C1D、AB3C3D;图 2b 中,机架AD为最长杆,则曲柄摇杆机构ABCD存在的条件是:a+d≤b+c,摇杆CD为主动件,则两个“死点”位置为AB1C1D、AB3C3D;图2c中,摇杆CD为最长杆,则曲柄摇杆机构ABCD存在的条件是:a+c≤b+d,摇杆CD为主动件,则两个“死点”位置为AB1C1D、AB3C3D;图2d中,摇杆CD为最长杆且摇杆CD和机架AD等长即c=d,则曲柄摇杆机构ABCD存在的条件是:a+c≤b+d,摇杆CD为主动件,则两个“死点”位置为AB1C1D、AB3C3D。

图2 几种状态下的死点位置
1.3 机构“死点”位置的判断
(1)从动件与连杆是否共线(从动件与连杆的位置是否重合):如图2所示几种状态下的“死点”位置可以看出,对于曲柄摇杆机构而言,若曲柄为主动件时,摇杆CD与连杆BC无共线位置,不会出现死点;当以摇杆为主动件时,曲柄AB与连杆BC有两次共线位置,将会出现“死点”。
(2)用力矩判断:如在曲柄摇杆机构中,当摇杆主动而曲柄处于和连杆成一条直线的两个极限位置时,连杆传给曲柄的力不能产生使曲柄回转的力矩。
综上所述,对于同一机构,选择不同连架杆作为主动件,其机构有无死点位置的情况将会不一样,关键问题是根据从动件是否与连杆共线(或位置重合)来判定。
1.4 机构“死点”与机构“极位”和“自锁”的区别[4]
机构“死点”和机构“极位”实际上是机构的同一位置,不同的是机构的主动件不一样。当从动件与连杆共线时为“死点”,机构在“死点”时,不论驱动力多大,都不能使机构起动。但如因冲击、振动等原因使机构离开“死点”而可继续运动时,从动件的运动方向却是不确定的,既可能正转也可能反转,故机构的“死点”位置也是机构运动的转折点,而当主动件与连杆共线时则为极位,在极位附近,由于从动件的速度接近于零,故可获得很大的增力效果。
所谓机构“自锁”,是指有些机构就其结构情况分析自由度大于零,因此只要加上足够大的驱动力,按理就能够沿着有效驱动力作用的方向运动,而实际上由于摩擦的存在,却会出现无论该驱动力如何增大,即使增大到无穷大,也无法使它运动。这种现象称机构的“自锁”。机构之所以出现“自锁”,是由于机构中存在着摩擦。而机构处于“死点”位置时,即使不存在摩擦,机构也不能运动,这是机构“死点”与机构自锁之间的本质区别。
2 机构“死点”的排除与利用
2.1 机构“死点”位置的排除方法[5]

图3 缝纫机的踏板机构
在工程上,为了使机构能够顺利通过“死点”而正常运转,必须采用适当的措施,如发动机上安装飞轮以加大惯性力,家用缝纫机(图3所示)的踏板机构上采用较大的带轮作为曲柄,利用带轮的惯性使机构渡过死点,或利用机构的组合错开死点位置。当一个机构处于“死点”位置时,可借助另一机构来越过死点位置。例如机车车轮的联动装置,图4所示蒸汽机车车轮联动机构,就是采用两组相同机构错开一定的角度布置,使两组机构的死点位置相互错开,当一个机构处于“死点”位置时,可借助于另一个机构越过“死点”,从而使曲轴获得有效的驱动力,不会使车轮“卡死”。

图4 蒸汽机车车轮联动机构
2.2 “死点”位置在实践中的应用[6]
2.2.1 飞机起落架
飞机起落架如图5所示,就是利用“死点”位置使飞机降落安全可靠。飞机起落架机构是双摇杆机构,通过主动摇杆DE可使轮子在飞机降落时放下,刚好是死点位置(BD杆与DE杆共线),巨大的着陆反力不会使主动摇杆DE转动,以便于飞机安全着陆;起飞后在摇杆DE的摆动下,使轮子收起,以减小空气阻力。
2.2.2 折叠家具
图6所示折叠桌的撑起位置就是四杆机构ABCD的“死点”位置,折叠桌收合位置就是四杆机构ABCD机架、连架杆、连杆的共线位置。
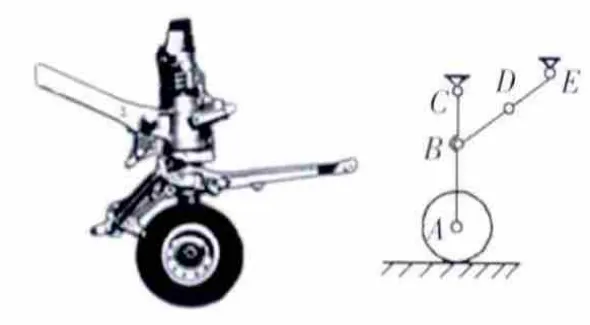
图5 飞机起落架机构

图6 折叠桌折叠机构

图7 电气设备开关的分合闸机构
2.2.3 电气设备开关的分合闸机构
电气设备开关的分合闸机构应用的是铰链四连杆机构“死点”位置合闸的原理,确保设备运行的安全可靠。图7所示为原理图,合闸时机构处于死点位置,此时触头结合力Q和弹簧力F对构件CD产生的力矩无论多大,也不能推动构件AB转动而分闸;当超负荷需要分闸时,通过控制装置(图中未表示)产生较小的力来推动构件AB使机构离开死点位置,构件CD便能转动从而达到分闸的目的。如图7中虚线所示。
2.2.4 在伞中的应用
图8所示,伞的撑合机构是一个摆动导杆机构,撑起的位置就是机构的“死点”位置。
2.2.5 在夹紧器械中的应用[7]
(1)垂直式夹具垂直式夹具应用的是铰链四连杆机构的原理,如图9所示。夹紧状态下即机构“死点”位置。
(2)杠杆式夹紧钳
杠杆式夹紧钳应用的是铰链四连杆机构的原理,如图10所示。当AB与BC处于同一直线时,夹紧钳就处于“死点”位置,此时将手把松开,所夹的东西依然处在夹紧状态。通过调整螺钉可改变张开的大小,从而使夹紧钳处于“死点”位置。

图8 伞的撑合机构

图9 垂直式夹具

图10 杠杆式夹紧钳
(3)钻床夹具
图11中工件夹紧后BCD成一条直线,即使工件反力很大也不能使机构反转,从而工件的夹紧牢固可靠。

图11 钻床夹具
3 结束语
“死点”对机构有利有弊,对传递运动的机构来说,“死点”是有害的,应设法排除;而对于那些需要利用“死点”处于稳定位置的机构来说是有利的,应根据不同的设计要求灵活运用,做到有的放矢。“死点”应用的实例很多,文中列出的几种并不全面,希望能起到抛砖引玉的作用。
[1]卜新民,王月华,万春风.机械设计基础[M].西安:西安电子科技大学出版社,2011:164-165.
[2]郭谆钦,金 莹.机械设计基础[M].青岛:中国海洋大学出版社,2011:36-38.
[3]王先安,谭加才.曲柄摇杆机构死点情况分析及其应用[J].湖南工程学院学报,2004,14(3):48-49.
[4]马学勤.机构死点分析及其应用[J].株洲师范高等专科学校学报,2006,11(5):27-29.
[5]程引正.平面四杆机构死点问题探讨及应用.[EB/OL].http://wenku.baidu.com/view,2012,4.
[6]lu_haokun.浅析六种机构死点位置的应用.[EB/OL].http://wenku.baidu.com/view,2012.1.
[7]张夕琴,谢建庆.机构死点在工程上的应用[J].装备制造技术,2008,(12):178-179.
[8]陈 伶,胡范文,周 桓.机械压力机多连杆机构优化设计与动画仿真.锻压装备与制造技术,2003,38(2).
