改进单神经元PID用于预防水轮机组功率振荡
2013-08-11李晓娇孙建平刘友宽高东磊张建辉
李晓娇,孙建平,刘友宽,高东磊,张建辉
(1.华北电力大学 控制与计算机工程学院,河北 保定 071003;2.云南电网电力研究院,云南 昆明 650217)
0 引言
低频振荡是指电力系统中联络线上有功功率在振荡频率为0.2~2.5 Hz范围内波动。低频振荡对电网的安全稳定运行造成了严重的威胁。研究表明,原动机侧的功率波动是造成电网低频振荡的原因之一。发电机组是整个电力系统的源头,只有保证发电机组出力稳定,才能保证电力系统的正常运行。水电机组在运行过程中所处的工况经常会偏离额定工况,如水轮机组的水头会发生偏离额定水头的情况。在这种情况下,因被控对象特性发生变化,经典PID控制器的控制效果会变差。因此采用自适应PID来进行控制是十分必要的。常用的自适应PID有模糊控制PID、专家控制PID、单神经元PID等。前两者需要丰富的工作经验来做依托,具有局限性。本文针对云南某水电机组模型,采用改进单神经元PID进行控制。该控制器可根据水头变化调整参数,消除工况变化对机组功率控制品质的影响。
1 单神经元PID
单神经元PID控制器 (图1)综合了单神经元自适应能力强及PID控制简单且精度高的优点,使控制器具有了自适应能力,增强了系统的鲁棒性。
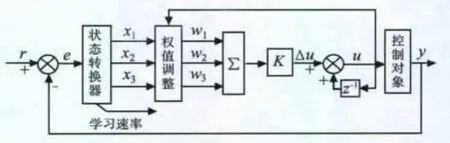
图1 单神经元自适应PID控制结构Fig.1 Structure of single neuron PID controller system
单神经元的输入为:

式中:e(k)=r(k)-y(k)。
单神经元PID控制器通过调整加权系数实现了自适应、自组织的功能。权系数的调整按照有监督的 Hebb学习规则实现,3个权值更新规则为:
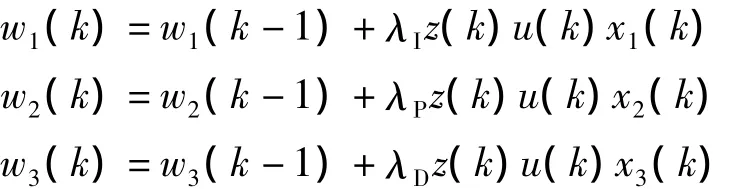
式中:z(k)=e(k);λI,λp,λD为积分 I、比例 P和微分D的学习速率,采用不同的学习速率以便对不同的权系数进行调整。
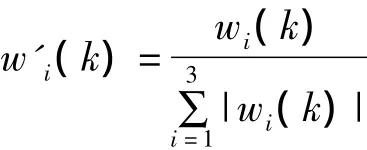
单神经元PID控制器的控制率可以表示为:

式中:K为单神经元控制器的比例系数。
通过总结大量的工程应用实践可知,单神经元PID控制算法中加权系数的学习修正主要与e(k)和Δe(k)有关,可将其中的xi(k)改为e(k)+Δe(k),改进后的控制算法与学习算法为:
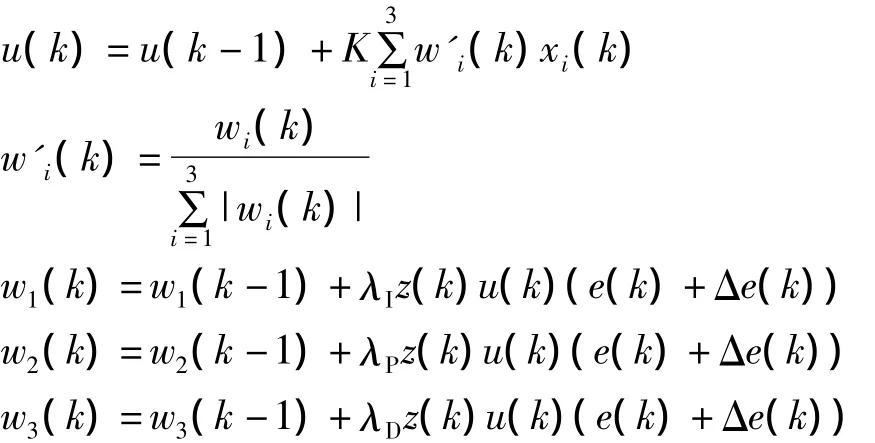
式中:Δe(k)=e(k)-e(k-1),z(k)=e(k)。
改进单神经元PID控制器中权值系数的在线修正参考了实际经验,不完全依据神经网络的学习原理,因此学习算法达到了较好的运行效果。
2 改进单神经元PID在水轮机组中的应用
2.1 水头对水轮机组功率的影响
水轮机输出功率P为通过水轮机的水流所具有的水力功率,通常以kW为单位,计算公式为:

式中:ρ为水的密度;g为当地重力加速度;Q为水轮机的流量;H是水轮机的工作水头。
通过水轮机的相似原理可知,几何相似的水轮机在相似工况下,流量与水头的平方根成正比,与直径的平方成正比。
由水轮机的出力公式可知,机组出力与水头和流量成正比。因此,几何相似的水轮机在相似工况下,出力与水头的1.5次方成正比,与直径的平方成正比。同一台水轮机一定为几何相似的水轮机,直径的比值是固定值1。由以上分析可得水轮机组的出力与水头的1.5次方成正比。
以云南某水电机组为研究对象,在其水轮机调速系统模型中按照水头和机组出力的关系引入水头干扰。水轮机组额定水头为86 m,在Simulink中分别模拟水头为 60 m,70 m,110 m,130 m时,经典PID控制器的控制效果,仿真结果如图2。
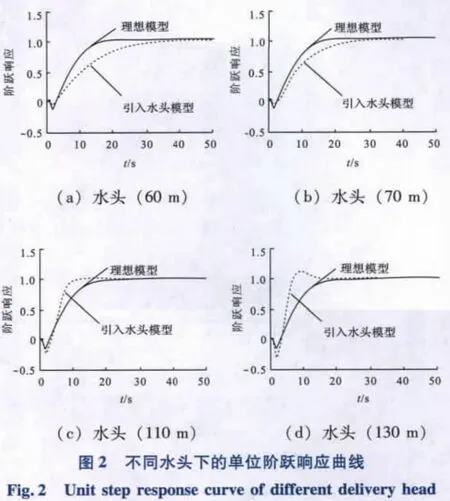
由图2可知,当水头偏离额定水头时,经典PID的控制效果会变差,无法满足控制要求。
2.2 改进单神经元PID在消除水头变化影响方面的应用
水头变化导致做功介质的做功能力发生变化,即水轮机组功率控制回路的被控对象增益发生了变化。在水头为100 m和130 m的工况下,分别采用经典PID控制器与改进单神经元PID控制器来对水轮机组进行控制。在simulink中进行建模仿真,结果如图3和图4。
由图3和图4可以看出,当水头偏离额定水头时,经典PID控制器无法适应工况的变化,控制效果明显变差,甚至出现了超调。这种情况可能导致机组有功功率发生波动,引起机组功率振荡和电网的低频振荡。采用改进单神经元PID控制器后,尽管水头发生了变化,但其控制效果仍与额定水头下的控制效果相近,没有出现超调,控制品质较好。可知改进单神经元PID控制器的鲁棒性强,能够根据工况变化调整控制器参数,很好地消除了水头变化对机组功率的影响。


3 结论
保证水轮机组的稳定出力对于整个电网的安全稳定都有重要的意义。机组实际运行过程中,水头会发生偏离额定水头的情况。由分析可知,机组出力与水头的1.5次方成正比,水头的变化会导致功率控制回路增益发生变化,因此,在功率控制回路中应考虑水头因素的影响。现在水电厂普遍采用的经典PID控制器,无法适应水头的变化,当水头变化时控制品质会变差。本文提出了一种采用改进单神经元PID控制器来代替功率控制回路中经典PID控制器的方法。仿真表明,该方法能够根据水头变化调整控制器参数,实现较好的控制效果,保证水轮机组的稳定出力。
