低速飞机分布式非线性气动模型建模方法
2012-11-06熊磊周洲
熊磊, 周洲
(西北工业大学 无人机特种技术国家重点实验室, 陕西 西安 710065)
低速飞机分布式非线性气动模型建模方法
熊磊, 周洲
(西北工业大学 无人机特种技术国家重点实验室, 陕西 西安 710065)
针对低速类大展弦比飞机阵风载荷分析与风场飞行的仿真问题,提出了一种基于二维翼型气动特性的全机三维分布式非线性气动模型的建模方法。将采用该方法的计算结果与采用CFD的计算结果进行了对比,证明了该方法可以精确模拟低速类大展弦比飞机的气动特性。以此为基础,进行了无人机在1-Cosine型阵风作用下的飞行仿真。结果表明,低速类大展弦比飞机在遇到阵风时,会出现与传统问题完全不同的阵风过载与飞行特性。
翼型; 分布式; 非线性气动模型; 阵风载荷; 飞行仿真
引言
飞机在飞行时会受到来自大气风场的扰动。用传统方法[1-4]分析飞机遭遇阵风扰动时,大都将其视为质点。大型飞机由于受风场影响更加显著,因此采用了较为复杂的四点法或五点法。这些方法对传统问题都有较好的适用性,但对于近年来出现的大展弦比、低翼载荷、低速度的新型飞机,如太阳能无人机,则存在比较明显的缺陷。此类飞机外形尺寸巨大,在风场中会明显受到风速分布变化带来的影响。此外,由于飞行速度低,在风速足够大的情况下,采用传统方法将不再合适。例如阵风风向与飞机飞行方向夹角很大时,飞机的相对迎角已远远超过其失速迎角,导致气动力发生非线性变化,且风速会与飞行速度叠加,显著增加当地动压。以上这些问题都是传统方法没有或缺乏考虑的。
为了同时模拟分布式风场和非线性气动力变化对飞机飞行特性带来的影响,并在将来能够加入对飞机弹性变形的考虑,本文结合文献[5]中的思想,提出了一种基于二维翼型气动特性的全机三维分布式非线性气动模型建模方法。此方法的核心思想在于将飞机的气动特性进行离散化分析,用飞机各气动部件的翼型气动特性对飞机的全机气动特性进行合成。由于可以在很宽的迎角、速度及雷诺数范围内提供翼型的气动特性,且对于低速类飞机采用的大展弦比、小后掠角机翼又有着相对较高的精度,因此这种方法非常适合解决上述问题。
1 建模方法
1.1 飞机质点运动向当地翼型运动的转换
建模过程一共采用了3个坐标系。重心处的机体坐标系为模型的主坐标系。当地机体坐标系:该坐标系遵从机体坐标系原则,原点位于飞机任意位置;当地翼型体坐标系:该坐标系两个方向分别与当地翼型的二维体坐标系重合,而另外一个轴垂直于翼型平面指向展向。
在主坐标系下,首先对飞机三维外形进行离散。由于飞机外形为刚性,因此可将飞机的主要部件离散为有限个确定的坐标点。将这些点的坐标值与飞机重心处的速度和转动角速度结合,即可求出此点在当地机体坐标系下的运动速度及转动角速度。设编号为k的坐标点处的坐标值为(xk,yk,zk),飞机重心在主坐标系下的运动速度及转动角速度分别为vx,vy,vz,ωx,ωy,ωz,则此坐标点处在当地体轴系下的运动速度及转动角速度分别为:
(1)
获得当地体轴系下的速度与角速度后,再对当地翼型的安装角、扭转角和上反角进行坐标旋转,变换为当地翼型体坐标系。设此点处的机翼上反角为Γ,左机翼上反时取正;安装角和扭转角分别为i和ε,机翼前缘向上时取正,则变换矩阵A为:
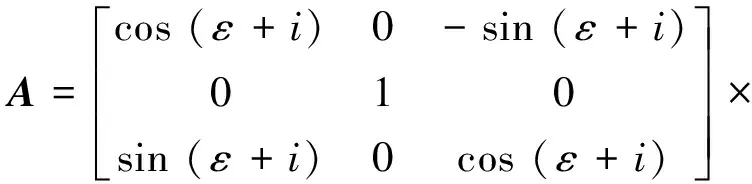
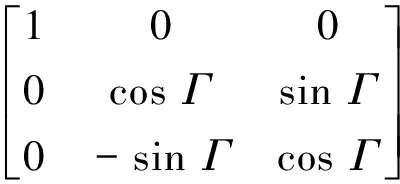
(2)
1.2 二维翼型气动特性的表征
通过坐标变换已经将翼型的运动分离为翼型弦向及机翼展向两个方向。对于大展弦比机翼可以忽略展向运动,翼型的运动将只剩下平动与转动两部分。平动部分可以通过两个方向的平动速度与当地气流(如阵风)叠加转化成定常气动问题,而转动部分可将翼型的体轴坐标原点设在50%弦长处。由于前后弦长相等,可近似认为翼型绕此点的旋转产生一对力偶,无作用力但有阻尼力矩。由于转动角速度一般非常小,因此可近似为线性值。
翼型平动时的气动特性是本方法的核心。翼型在其二维体坐标系下的气动特性主要靠弦向力、法向力与俯仰力矩3个因子来表征。其中,弦向力由于翼型外形呈狭长型,且主要由摩擦及翼型前后压差产生,因此造成其作用点变化范围较小,可近似认为作用于翼型弦线上。因而翼型力矩的变化可看作是法向力作用点变化所引起的。设翼型体轴系下法向力系数为CN,俯仰力矩系数为Cm,翼型当地弦长为cA,法向力作用点与力矩参考点的距离为xAF,则:
xAF=cACm/CN
(3)
使用翼型气动特性来反推全机气动特性的最大优势在于可采用分布式风场,并降低了飞行仿真中处理非线性气动导数的难度;可以对飞机各点处施加不同的风速,这更接近真实物理过程,且理论上只要翼型数据准确,飞机的各气动数据也应是准确的。本文中的翼型数据由CFD计算得到。理论上,采用风洞实验数据将更加合理,但在缺乏风洞实验条件且只是定性分析问题时,CFD的结果可以满足需要。
翼型气动数据还可准确模拟当地来流的速度变化,捕捉动压变化对气动特性的影响。这对在非均匀风场下飞行的低速飞机来说有实际意义。而通过建立若干不同雷诺数对应的翼型气动参数,在其之间进行插值则可以很好地模拟低速时的雷诺数效应。
1.3 二维翼型气动特性向全机气动特性的转换
在得到二维翼型的气动力与力作用点后,需要将其反变换回到全机的主坐标系之下。气动力的变换矩阵为AT。力矩则需要考虑翼型法向力在翼型弦向方向的移动,其公式为:
(4)
对于大展弦比机翼,采用经典的升力线理论进行修正是合理的。文献[6]提供了一种非常好的非线性气动力的升力线修正方法。飞机各主要部件之间的干扰修正需要针对对象的不同而采用合适的方法。本文采用文献[7]提供的工程方法对翼面间的下洗和阻滞进行修正。修正结果表明,对于低雷诺数飞机来说,修正值有些偏大。飞机非气动部件的气动力估算也按照文献[7]中的对应方法进行修正。以上计算完成之后,对飞机各部件气动力进行总成,即是飞机在给定飞行条件下的气动总力及力矩。在得到飞机质心处的总力与力矩后,只需加入最基本形式的六自由度方程即可进行飞行仿真。
2 算例分析
2.1 验证算例
此次模拟的对象为某型太阳能无人机,该无人机采用鸭式布局,翼载荷为5.54 kg/m2。计算高度为海平面,计算速度为10 m/s。本文方法的计算结果与CFD的计算结果对比如图1~图3所示。

图1 升力系数随迎角的变化曲线
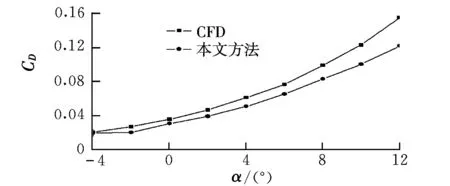
图2 阻力系数随迎角的变化曲线
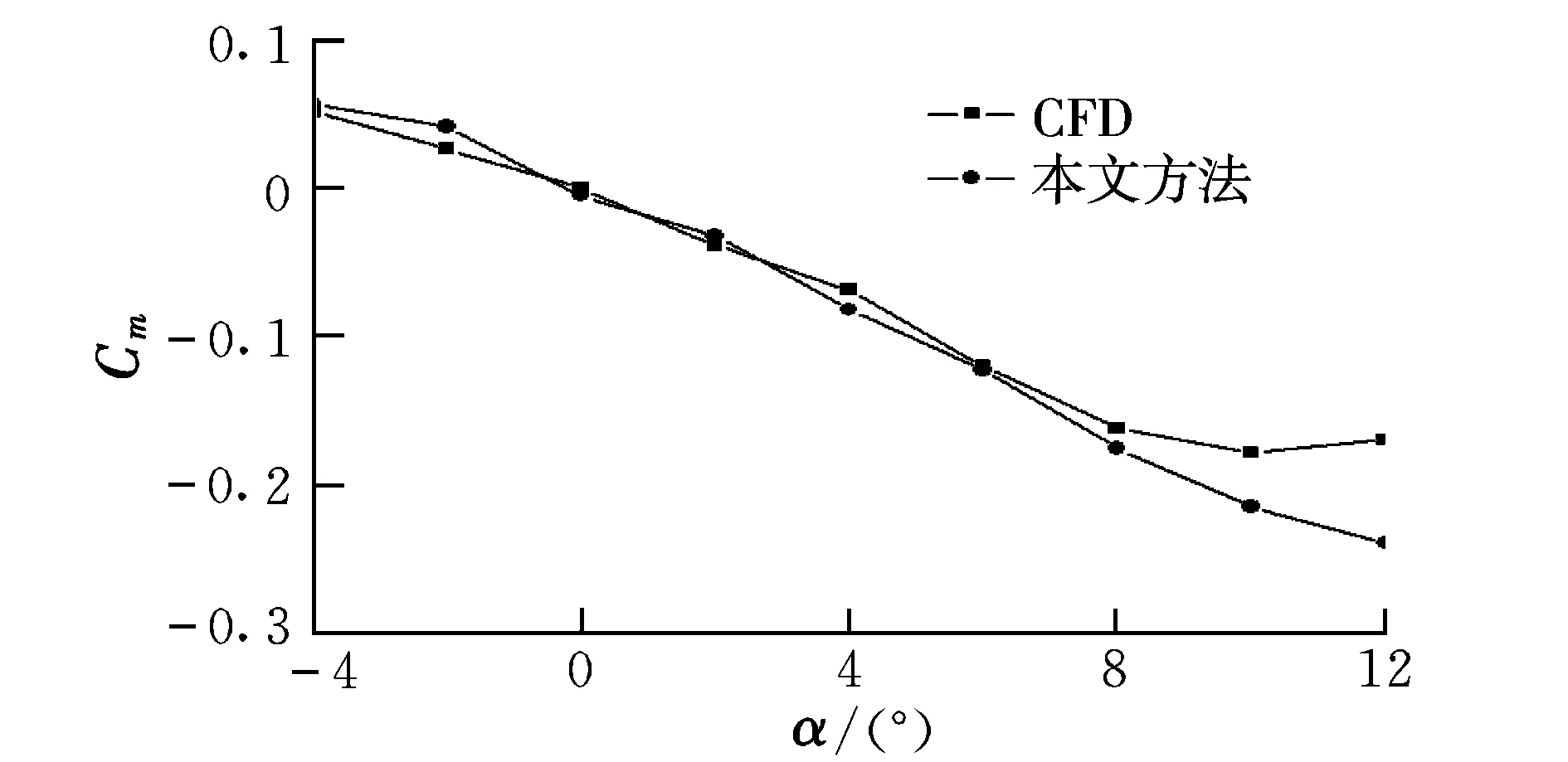
图3 俯仰力矩系数随迎角的变化曲线
从图上可以看出,飞机的升力与力矩特性吻合非常好,而阻力值相对较小,这主要是前后翼干扰的工程修正法不够精确所致,进一步的工作应采用风洞或CFD数据进行修正。横航向气动特性的对比则证明由本文方法得到的侧向力与滚转力矩非常准确,航向力矩则由于无法模拟大侧滑时垂尾的气动效应损失而偏保守,部分动导数量级正确但存在差距,由于动导数是由工程方法得到的,因此需要进一步的分析。
2.2 1-Cosine型风场飞行仿真及分析
在前文验证算例的基础上,对某型太阳能无人机进行了1-Cosine型阵风作用下的风场飞行仿真。阵风的速度型如下:
(5)

仿真共考虑了两种典型的阵风作用情况。第1种情况假设飞机整体进入阵风,以模拟大尺度阵风短时间作用于飞机上的过程。在此基础上,考虑了两种飞行方式。首先限制飞机的俯仰转动,以观察飞控系统控制律对过载的影响。图4是过载的时间历程曲线。一共模拟了5个阵风作用角度。通过曲线对比可以看到,当阵风为垂直阵风时,过载增量并不大,因为此时飞机已进入深失速状态。45°对应的是飞机未进入失速所受到的最大过载。60°时产生最大过载的原因在于飞机退出失速后与大速压相互叠加。由于飞机翼载低,运动响应显著,因此失速前的最大过载处并非对应出现在阵风速度最大处,而是出现在阵风速度增长率最高处附近。而当阵风风速增加速率减缓,导致飞机退出失速时,阵风速度却达到最大,造成一个过载峰值。
作为对比,在相同参数下放开飞机的俯仰控制,此时飞机对阵风自由响应,结果如图5所示。由图可以看到,在中小迎角时,飞机的自由俯仰运动可以减小阵风过载。这是因为飞机在静稳定性作用下低头,减小了来流迎角与阵风过载。但当阵风夹角接近垂直时,飞机同样低头减小来流角,但却使飞机遇到了类似图4中60°阵风角时的情况,导致过载增加。因此在进行阵风过载抑制的控制系统设计时,需要根据阵风与飞机飞行速度方向综合考虑。
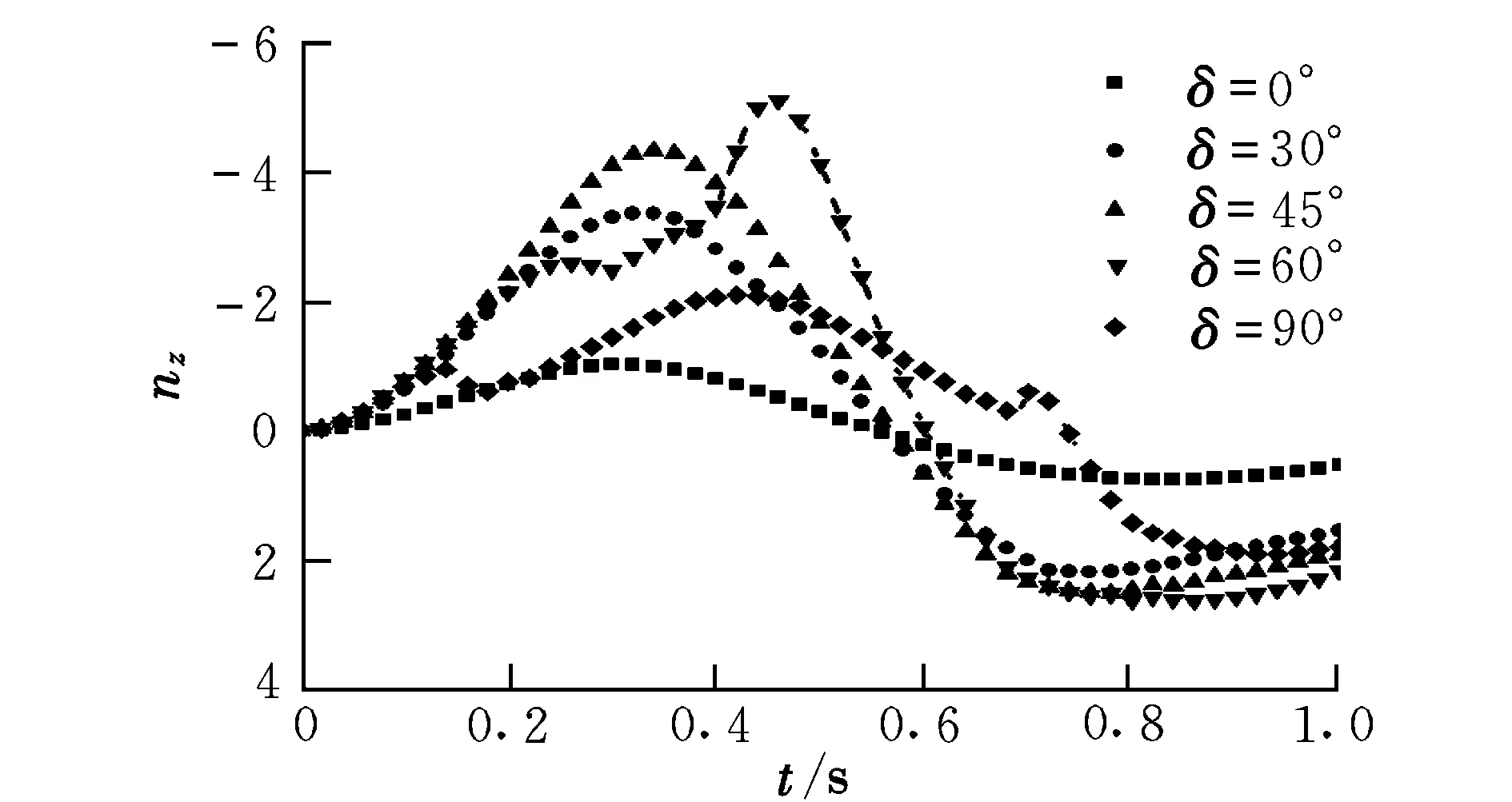
图4 过载曲线(有俯仰控制)
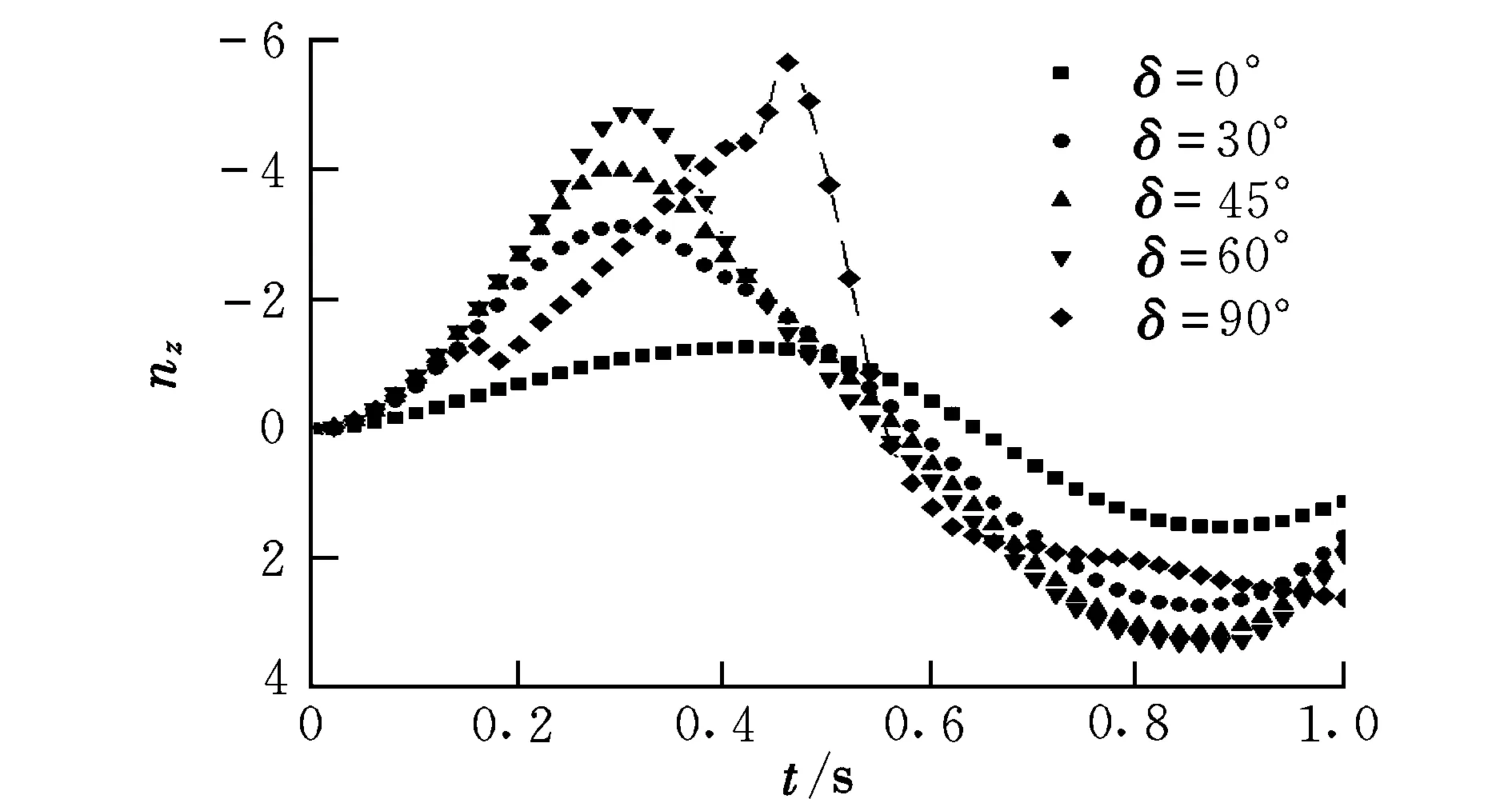
图5 过载曲线(无俯仰控制)
第2种情况假设飞机沿飞行方向先后进入一个垂直阵风。此情况主要研究风场随时间的变化(即非冻结场)及飞机纵向尺寸对飞机过载的影响。为了模拟风场的时间变化,加入时间延迟tD=d/vD,式中,d为飞机上某点最初进入阵风点的距离,vD为飞机在该方向的飞行速度与阵风速度的叠加值。为了研究飞机的基本特性对其风场飞行特性的影响,因此赋予其完全的自由度。图6所示的是相同垂直阵风作用下没有考虑风场时变与考虑了风场时变的过载响应曲线对比。
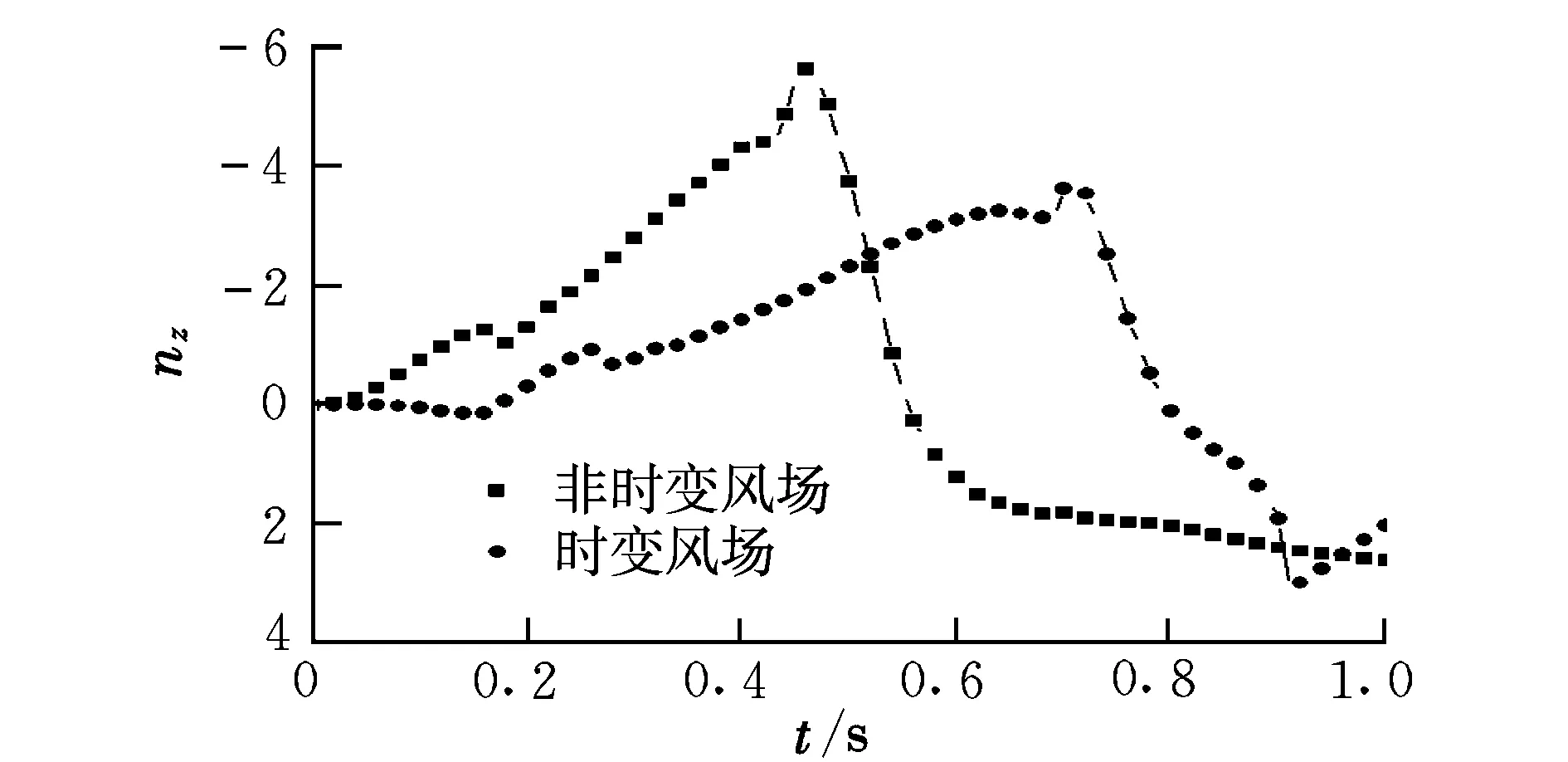
图6 过载对比曲线(无俯仰控制)
由图可以看到,飞机过载会有一个明显的延迟。由于尺寸和飞行速度低,导致飞机鸭翼首先进入阵风,并使飞机在初期上仰。两次仿真的最大过载点特征相似,这是飞机机翼产生最大升力的标志。但加入风场时变后的过载值较小,这是鸭翼与机翼的最大升力点相互错开所造成的。由于飞机机翼进入最大阵风点时鸭翼处的风速已经非常小,因此低头力矩更大并造成飞机的低头运动更加剧烈,飞机在阵风结束时俯冲角较非时变风场大很多。大展弦比飞机的纵向转动惯量一般会比其他两个转动惯量小一个量级,这在很大程度上恶化了纵向响应问题。
综上所述,风场随时间的变化对这类飞机的运动响应有着显著的影响,因此在研究此类问题特别是紊流场这种典型分布式风场时,必须考虑风场随时间变化对飞机飞行造成的影响。
3 结束语
本文采用分布式非线性气动模型对低速类大展弦比飞机的气动特性进行了模拟。结果表明,该方法原理正确,精度可初步满足工程设计和飞行仿真的需求,并具备较大的提升空间。由于该方法在非线性气动特性模拟、计算效率上具有较大优势,并具备耦合结构模型、模拟飞机弹性变形的潜力,因此非常适合应用于低速类大展弦比飞机的飞行仿真领域。对太阳能无人机1-Cosine型阵风响应的仿真结果表明,低速大展弦比飞机的过载产生机理、产生过程、大小均与常规飞机不同,超过传统方法的适用范围,并严重影响到飞机的飞行安全。此外,风场的时变特性与飞机本身的尺寸对飞机飞行特性的影响非常显著,在飞行仿真中必须考虑分布式时变风场的影响。
[1] 飞机设计手册总编委会.飞机设计手册[M].北京:航空工业出版社,1994.
[2] 国防科学技术工业委员会.GJB 67.2-85 军用飞机强度和刚度规范——飞行载荷[S].北京:国防科学技术工业委员会,1985.
[3] Frederic M Hoblit.Gust loads on aircraft:concepts and applications[M].Washington,D C:American Institute of Aeronautics and Astronautics Inc,1988.
[4] 肖业论,金长江.大气扰动中的飞行原理[M].北京:国防工业出版社,1993.
[5] 何植岱,高浩.高等飞行动力学[M].西安:西北工业大学出版社,1990.
[6] 吴子牛.空气动力学[M]. 北京:清华大学出版社,2007.
[7] 严恒元,陈劲松,冯亚南,等.飞行器气动特性分析与工程计算[M].西安:西北工业大学出版社,1990.
(编辑:姚妙慧)
Amethodfordistributingnonlinearaerodynamicsmodeloflow-speedaircraft
XIONG Lei, ZHOU Zhou
(National Key Laboratory of Science and Technology on UAV, NWPU, Xi’an 710065, China)
A method for the whole aircraft 3-dimemsional distributed nonlinear aerodynamics model based on the aerodynamics of 2-dimensional airfoils has been established in order to calculate the wind load and simulate the flight process of low-speed aircraft with high-aspect-ratio in wind field. This method has already been proved reasonable by modeling a solar aircraft and comparing to CFD results. On the basis of this, a flight simulation through a 1-Cosine gust wind has also been done, from which it was found that the low speed aircraft with high aspect-ratio will have completely different gust load and flight characteristics when encountering gust wind.
airfoil; distributing; nonlinear aerodynamics model; wind load; flight simulation
V211.4
A
1002-0853(2012)05-0398-04
2011-11-23;
2012-04-16
熊磊(1985-),男,江西南昌人,硕士研究生,主要研究方向为飞行器设计、飞行力学、计算流体力学;
周洲(1966-),女,湖南长沙人,教授,博士生导师,主要研究方向为无人机总体、气动布局设计。