层叠结构动态逆在无人战斗机控制中的应用
2012-11-06鲁可袁锁中
鲁可, 袁锁中
(南京航空航天大学 自动化学院, 江苏 南京 210016)
层叠结构动态逆在无人战斗机控制中的应用
鲁可, 袁锁中
(南京航空航天大学 自动化学院, 江苏 南京 210016)
无人战斗机采用翼身融合的一体化设计。这种非传统构型的布局,带来很多优点的同时也造成了飞机的静不稳定,采用线性的控制方法很难满足无人战斗机的性能要求。通过对传统的动态逆控制方法进行改进,从内回路开始保证系统的动态性能和跟踪性能,设计了层叠结构动态逆控制器。仿真结果表明,所设计的控制器实现了系统的解耦控制,并具有较强的鲁棒性。
无人战斗机; 动态逆; 内回路; 鲁棒性
引言
无人战斗机采用翼身融合的一体化设计、飞翼式布局,取消了平尾和垂尾。这种非传统构型的布局,能够减轻重量,减小雷达反射面积,但同时造成了飞机的静不稳定,采用线性的控制方法很难满足无人战斗机的性能。当无人战斗机进行机动飞行时,气动力和力矩均进入了非线性范围,3个轴的惯性动力学耦合严重,这时无人战斗机的运动只能用9个非线性微分方程描述,无法再用传统的小扰动方法进行线性化处理、纵侧向分开及解耦处理,必须采用非线性控制[1]。动态逆的控制算法已经比较完善[2-4],但是动态逆控制律的成功应用要求控制方程必须已知并且被精确建模,这在很大程度上限制了非线性动态逆的应用。后来很多学者研究鲁棒动态逆的控制,以增强动态逆的实用性[1-2]。其中文献[1]用在线神经网络补偿了模型的不确定性,但神经网络的引入大大地增加了控制系统的复杂性[5],并且以前大部分研究都集中在慢回路也就是姿态回路方面,往往忽略了内回路的性能对整个控制系统的影响。本文以成熟的动态逆方法为基础,分析了气动力、气动力矩与舵面的关系,从内回路开始保证系统的性能,从而保证整个控制器的性能。
1 无人战斗机飞行控制系统设计
本文研究的控制对象为某型无人战斗机,该机采用飞翼布局、阻力方向舵。直接应用动态逆控制方法需要求全逆必须满足控制变量与状态变量数目相等的条件[6-7],因此,非线性动态逆方法在实际的飞行控制系统中应用时,多采用奇异摄动原理,以时间为尺度将系统划分成多个回路,然后对各个回路分别进行设计。通过划分快、慢子系统,可实现将全系统的控制器设计问题转换为子系统的控制器设计问题。根据奇异摄动理论,要求系统状态变量的动力学特性具有明显不同的时间尺度差异。在飞行控制系统中,状态变量的动力学特性就具有这种时间尺度差异,满足时标分离的条件,这样控制律的结构就变成了层叠结构。
1.1 内回路控制律设计
由于舵面的动作主要引起的是气动力矩的变化,所以考虑含有气动力矩的无人战斗机动力学方程为[7]:
式中,L,M,N分别为滚转力矩、俯仰力矩、偏航力矩。

上面的动力学方程可以写成下面的形式:
其中:
取
根据上式由期望角加速度可以求得期望的力矩。
无人战斗机力矩表达式可以写成如下形式[7-8]:
其中:
取内回路的控制律为:
这样,理想的舵面偏转就可以通过解一个三元一次方程组实时地计算出来。
1.2 外回路控制律设计
这里的外回路指的是姿态回路,在飞控系统中姿态回路是很重要的,因为无人战斗机的轨迹控制是通过对姿态角进行控制得到的。本文选择俯仰角、滚转角及侧滑角为控制对象,选择这些控制量会使飞控系统的应用范围增加很多,比如加上动力补偿系统可以用在无人战斗机自动着舰上面;加上协调转弯控制可以用在无人战斗机的航迹控制上;甚至在空中格斗时使侧滑角不为零以延长交火时间。
系统的外回路对应于飞机的运动学方程。该运动学方程可以写成如下形式:
其中:
Gya=mg(cosαsinβsinθ+cosβsinφcosθ-
sinαsinβcosφcosθ)
取外回路的控制律为:
1.3 协调转弯控制
空速向量与纵轴不能重合协调转动是产生侧滑角的根本原因,侧滑角使阻力增大,飞行品质变差,不利于机动飞行,因此必须实现协调转弯。
协调转弯应满足的条件为:(1)稳态的滚转角为常值;(2)稳态的偏航角速率为常值;(3)稳态的升降速度为零;(4)稳态的侧滑角为零。
假设俯仰角θ=0°,这样,飞机进行协调转弯时水平和垂直方向的力平衡方程为:


由上式可以得到协调转弯的公式为:
协调转弯的控制结构如图1所示,选择偏航通道的带宽为0.25。

图1 协调转弯结构图
2 内回路设计对系统的影响
动态逆控制律要求控制方程已知并且精确建模,当飞机进行机动飞行时飞机的状态已经完全进入非线性区,这时的气动参数摄动比较大,造成建模有较大误差。如何提高动态逆控制系统的鲁棒性一直是一个热点问题。目前主要方法有:采用在线神经网络对建模误差进行补偿;采用经典鲁棒控制设计方法进行鲁棒控制器设计。这些方法大部分都集中在外回路也就是姿态回路进行设计,而对内回路不够重视。当气动参数变化时首先引起的是气动力矩的变化,气动力矩变化又引起角加速度的变化,而外回路和内回路近似为一个积分的关系。所以内回路控制器要有足够的带宽和跟踪性能。为此,内回路采用PID进行校正,最终选取PID的参数Ki=0.8,Kd=0.5,Kp=2。选择仿真的条件为某无人战斗机在1 000 m高度,以100 m/s的速度进行直线平飞。当输入指令p=1 (°)/s,q=1 (°)/s,r=1 (°)/s时系统的响应如图2所示。由图2可以看出,内回路能够迅速跟踪参考输入,控制性能良好。

图2 角速度响应图
3 仿真验证
为了验证控制系统的性能,选取某无人战斗机作为研究对象,初始条件为该机在1 000 m的高度以100 m/s的速度进行平飞。当给定指令俯仰角θ=5°,偏航角ψ=5° 时,无参数摄动情况下系统的响应如图3和图4所示。

图3 无参数摄动时姿态角响应图

图4 无参数摄动时舵面响应图
当气动参数有±30%的摄动时,仿真结果如图5和图6所示。
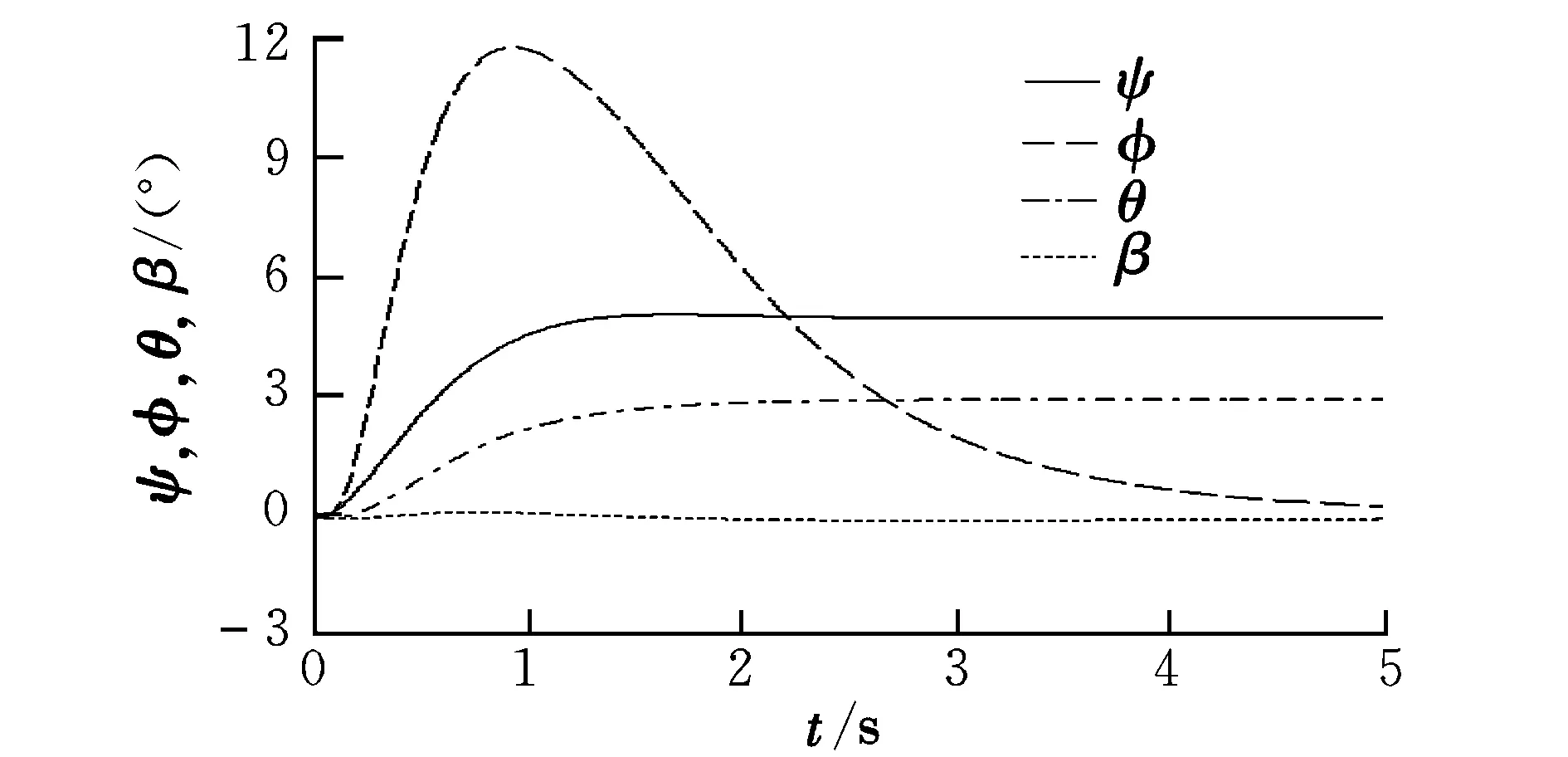
图5 参数摄动30%时姿态角响应图
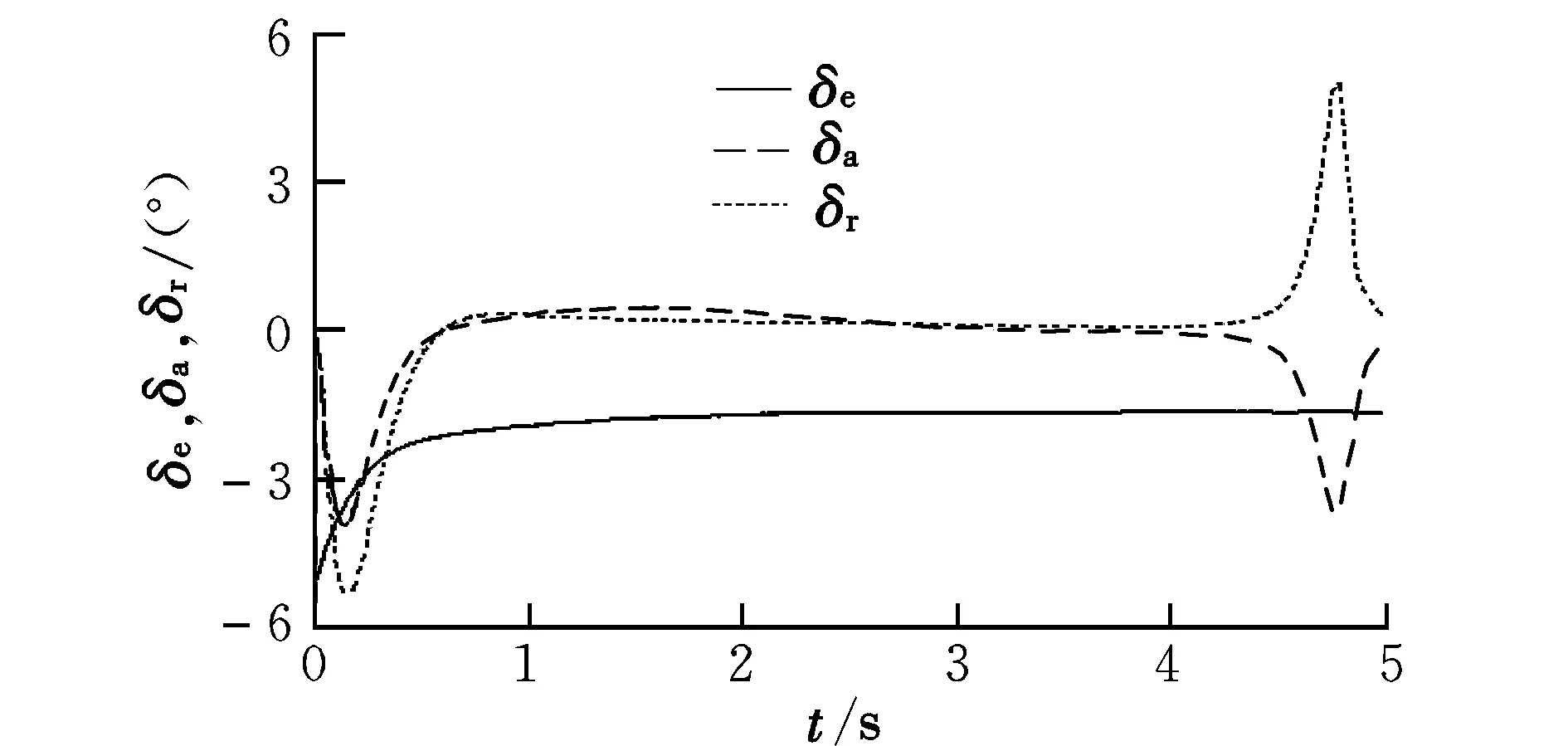
图6 参数摄动30%时舵面响应图
由仿真结果可以看出,当气动参数存在摄动时控制系统也可以很好地跟踪指令。
4 结束语
本文对无人战斗机进行了层叠结构动态逆控制律的设计,通过保证内回路的动态性能和跟踪性能对控制器进行设计,并且通过解一个三元一次方程组对舵面偏角进行实时解算。由仿真可以得出,当气动参数有30%的摄动时,该控制器表现出了良好的性能。
[1] 朱家强,郭锁凤.一种在线神经网络在补偿飞机模型不确定性误差中的应用[J].南京航空航天大学学报,2003,35(1):86-90.
[2] Snell S A,Perry W Stout.Robust longitudinal control design using dynamic inversion and quantitative feedback theory [J].Journal of Guidance,Control,and Dynamics,1997,20(5):933-940.
[3] 朱恩.大迎角超机动飞行控制技术研究[D].南京:南京航空航天大学,1995.
[4] Snell S A,Enns D F,Willian L G.Nonlinear inversion flight control for a supermaneuverable aircraft[R].AIAA-1990-3406,1990.
[5] Shin Yoong-hyun.Neural network based adaptive control for nonlinear dynamic regimes [D].Georgia:Georgia Institute of Technology,2005.
[6] Jacob Reiner.Flight control design using robust dynamic inversion and time-scale separation[J].Automatica,1996,32(11):1493-1504.
[7] 郭锁凤.先进飞行控制系统[M].北京:国防工业出版社,2003.
[8] 吴森堂.飞行控制系统[M].北京:北京航空航天大学出版社,2006.
(编辑:姚妙慧)
Hierarchy-structureddynamicinversionintheUCAVcontrol
LU Ke, YUAN Suo-zhong
(College of Automation Engineering, NUAA, Nanjing 210016, China)
UCAV used wing-body integration design. This non-traditional configuration could bring many advantages; however, this has resulted in the aircraft static instability. Linear control method is difficult to meet the performance of UCAV. Through the improvement of traditional dynamic inversion ontrol method, the layered structure dynamic inversion controller is designed to ensure the dynamic performance and tracking performance starting from the inner loop. The controller realizes the decoupling control and has a relatively strong robustness.
UCAV; dynamic inversion; inner loop; robustness
V249.1; V279
A
1002-0853(2012)05-0463-03
2012-01-09;
2012-04-19
南京航空航天大学基本科研业务费专项基金资助(V1083-031)
鲁可(1987-),男,山东曹县人,硕士研究生,主要从事飞行控制研究工作。