无刷直流电机换相转矩脉动抑制新策略
2012-09-22,,
,,
(上海理工大学 光电信息与计算机工程学院,上海 200093)
1 引言
由于无刷直流电机既具备交流电动机的结构简单、运行可靠、维护方便等一系列的优点,又具备直流电动机的运行效率高、无励磁损耗以及调速性能好等诸多特点,故在各领域得到广泛的使用。但是,无刷直流电机转矩波动较大,不仅会产生噪声和振动问题,而且影响整个系统的性能,从而降低电机的使用寿命和驱动系统的可靠性,影响了无刷直流电机的进一步发展。因此,分析和抑制转矩脉动就成为提高无刷直流电机控制系统的关键,成为近年来电机领域研究的热点和难点问题[1-3]。
目前无刷直流电机转矩脉动抑制方法主要分为4类:优化电机设计的齿槽转矩脉动抑制方法;优化由于非理想反电动势波形引起的转矩脉动抑制;换相转矩脉动抑制;基于现代控制理论和智能控制理论的转矩脉动抑制。由于无刷直流电机相电枢绕组电感的存在,使绕组电流从一相切换到另一相时产生换相延时,形成电机换相过程中的转矩脉动。文献[4]对比了两种脉宽调制方式PWM-ON和ON-PWM对转矩脉动的影响,提出了使用PWM-ON脉宽调制方法能降低换相转矩脉动,但对该调制方式产生的转矩脉动没有补偿,所以对转矩脉动抑制不明显。文献[5]提出了一种改进型双极性PWM方式,但该方法对系统的要求较高,并且对抑制转矩脉动也没有明显的效果。本文主要讨论由于换相期间电流变化引起的转矩脉动,通过对转矩脉动方程的分析,提出一种直接面向转矩脉动的转矩脉动补偿方法,该方法简单方便,能够推广于常见的各种脉宽调制方式之中。
试验控制系统采用了瑞萨电子有限公司的电机控制芯片uPD78F91213,通过实验证明,该芯片构成的无刷直流电机控制系统有高的可靠性和稳定性,并通过改进的脉宽调制方式有效地抑制了电机的转矩脉动,且已成功应用于电动助力车系统中。
2 直流无刷电机转矩脉动分析
设无刷直流电机直流三相对称,星型连接,忽略电枢反应,不计涡流和磁滞损耗,可以使用如下三相端电压平衡方程式来描述图1中的无刷直流电动机:
式中:ua,ub,uc分别为三相定子端电压;ia,ib,ic分别为三相定子电流;ea,eb,ec分别为三相反电动势;un为电机中性点电压;p为微分算子;R为定子电阻;L为有效电感。
等效电路及其驱动主电路如图1所示。

图1 无刷直流电机主电路图Fig.1 Main circuit of BLDC motor
电机电磁转矩Te为

式中:Te为电磁转矩;Pe为电磁功率;Ω为电机机械角速 度;ea,eb,ec为三相电枢 绕 组 反电势;ω为电机转子电角速度;np为电机极对数。
在二二导通,三相6拍的120°导通方式中,每一个60°区间内只有两相导通,如果不考虑PWM斩波和相电感的影响,稳态时无刷直流电机电磁转矩T为

式中:ke为电磁转矩常数;i0为当前电流稳态值;e为稳态时三相电枢绕组反电动势的和。
无刷直流电动机在工作时,每次换相相隔60°(电角度)。在换相期间,尽管关断相上的开关管已经关断,但由于电机绕组电感的存在,电流不可能一下减为零,总是会通过相应的续流二极管进行续流,随之再衰减为零。这是产生转矩脉动的主要原因,其次,在非换相期间,电机相电流的变化也会引起转矩脉动。下面主要对换相期间电机相电流的变化引起转矩脉动进行分析。
3 转矩脉动补偿控制
当上桥换相时,以V1管关断,V2管恒通,V3管为PWM调制为例来说明改进的HPWM-LON方式原理,根据图2可知换相期间电流流向。当V1关断时,由于电感的延迟效应,a相电流不能立即变为零,而是通过续流二极管D4续流缓慢下降为零,电流流向如箭头1所示,通过D4,a相绕组,c相绕组和V2形成回路。同时V3管进行PWM调制,因b相电流也不能立即改变,而是通过电流回路缓慢上升到稳定值。当V3管导通时,电流流向如图2a箭头2所示,通过Us,V3,b相绕组,c相绕组和V2形成回路;当V3管关断时,电流流向如图2b箭头2所示,通过D6,b相绕组,c相绕组和V2形成回路。
图2 上桥换相期间电流流向图Fig.2 Figure of current direction during up-bridge commutation
当下桥换相时,以V4管关断,V6管恒通,V5管为PWM调制为例来说明改进的HPWM-LON方式原理,根据图3可知换相期间电流流向。当V4关断时,由于电感的延迟效应,a相电流不能立即变为零,而是通过续流二极管D1续流缓慢下降为零。当V5导通时,如图3a中箭头1所示,电流通过D1,V5,c相绕组和a相绕组形成回路;当V5关断时,如图3a中箭头1所示,电流通过D1,Us,D2,c相绕组和a相绕组形成回路。同时打开V6管,因b相电流也不能立即改变,而是通过电流回路缓慢上升到稳定值。当V5导通时,电流流向如图3a中箭头2所示,电流通过Us,V5,c相绕组,b相绕组和V6形成回路;当V5关断时,电流流向如图3a中箭头2所示,通过D2,c相绕组,b相绕组和V6形成回路。
图3 下桥换相期间电流流向图Fig.3 Figure of current direction during down-bridge commutation
从以上分析可知,由于关断相电流不是从稳定值立即下降到零,而是通过续流通道缓慢下降到零,导通相电流也不是从零瞬变为稳定值,所以在换相期间会引起转矩大的脉动。改进补偿策略见图4。

图4 改进的HON-LON和HPWM-LON相结合的调制方式示意图Fig.4 Schematic of improved HON-LON and HPWM-LON modulation
当检测到换相信号时,在t时间段内采用HON-LON调制方式,即上桥开关管和下桥开关管同时导通,来补偿电流的变化以抑制转矩脉动;当补偿时间t过后,在(T-t)时间段内采用 HPWM-LON的脉宽调制方式,即上桥开关管为PWM,下桥开关管为ON的调制方式。
具体分析如下,当上桥换相时,以电流从a相切换到b相时为例,如图2所示,V1管为关断开关管,V3管为开通开关管,V2管为非换相开关管。在改进的调制方式下,开通管V3进行全开(HON),非换相开关管V2恒通(LON)。因换相期间D4导通续流,则图2中a点与地相连,忽略二极管管压降,电机端电压Ua=0;V3管全开,即占空比为1,直流母线电压为Us,则Ub=Us;V2恒通,Uc=0。其中,Us为直流母线电压。将电机端电压代入式(1)中可解得

在从a相切换到b相前,设电流ia=i0,ib=0,ic=-i0,将式(4)代入式(1)中,可近似得到换相过程中三相电流方程如下式所示:
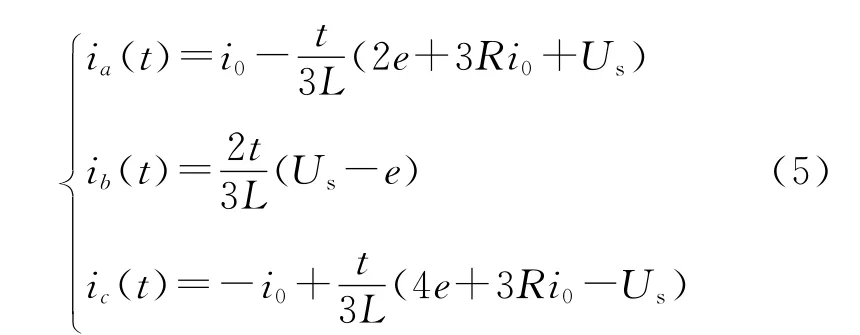
将式(5)代入电磁转矩式(2)中,可以计算出上桥换相过程中的电磁转矩Tup如下式所示:

将式(6)与式(3)比较,得上桥换相转矩脉动ΔTup如下式:

令ΔTup=0,可得下式:

设换相时间为tup,在换相结束时,三相电流分别为ia=0,ib=i0,ic=-i0,根据式(5)和式(8),可解得上桥换相时间

当下桥换相时,也以电流从a相切换到b相为例,如图3所示,V4管为关断开关管,V6管为开通开关管,V5管为非换相开关管。在改进的调制方式下,非换相开关管V5全开(HON),开通管V6全开(LON)。因换相期间D1导通续流,忽略二极管管压降,则图3中a点与Us相连,Ua=Us,V6管全开,b点与地相连,则Ub=0;V5管全开,则Uc=Us。将此时电机端电压代入式(1)中可解得

在从a相切换到b相前,设电流ia=-i0,ib=0,ic=i0,将式(10)代入式(1)中,可近似得到换相过程中三相电流方程为
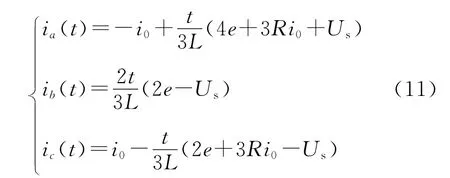
将式(11)代入电磁转矩公式(2)中,可以计算出下桥换相过程中的电磁转矩Tdown为
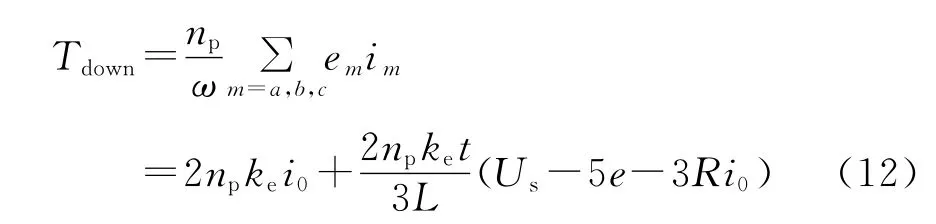
与式(3)比较,得下桥换相转矩脉动ΔTdown为
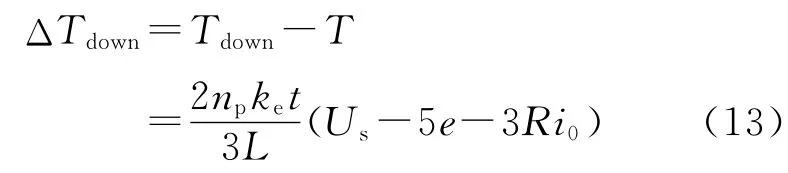
令ΔTdown=0,即

设换相时间为tdown,在换相结束时,三相电流分别为ia=0,ib= -i0,ic=i0,根据式(11)和式(14),可解得下桥换相时间

由以上分析可知,tup=tdown,当换相时,在时间段tup或tdown内,使用调制方式HON-LON对电流进行补偿,可有效抑制或消除转矩脉动。
4 控制系统设计
控制系统采用瑞萨电子有限公司的电机控制芯片uPD78F91213,主要负责采集信号,处理控制算法和控制策略。电机内部安装3个霍耳传感器,用于确定转子位置,输出3路方波信号,通过单片机的I/O口实时检测信号可以转换为确定电机位置的换相信号。电机速度可根据霍耳换相信号得到,单片机通过10位的A/D接口连接电流检测电路得到实时的电流值。根据检测到的电机速度和电流值,结合霍耳换相信号,通过控制算法计算出合适的PWM值,输出给电机驱动模块,从而带动电机稳定快速的运行。
5 实验结果及分析
本文对提出的补偿算法进行了实验,无刷直流电机参数为:额定功率100W,输入电压36V,额定转速300r/min。其他参数为:Us=36V,R=0.3 Ω,L=0.11mH,e=2V,i0=6A,则换相时间
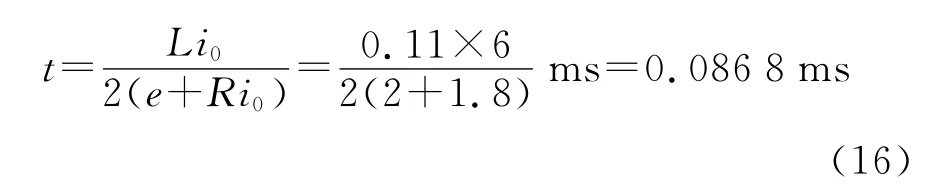
即在换相后时间t=0.086 8ms内,进行HONLON调制,就可抑制补偿转矩脉动。实验对相电流波形进行了观测,采用两种调制方式时,电机的相电流波形如图5所示。
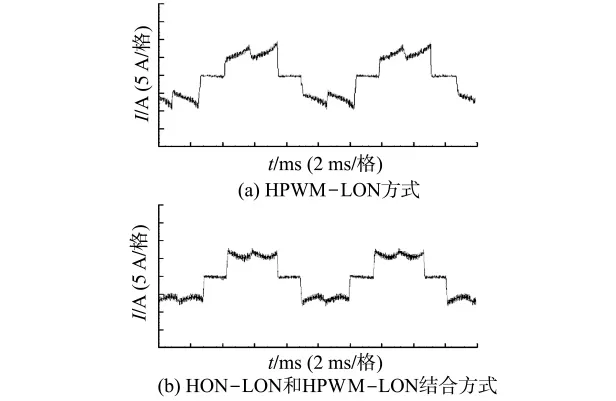
图5 两种调制方式时电机相电流波形Fig.5 The phase current under two modulations
比较图5a与图5b可以看出,采用一般的HPWM-LON的方式调制,电流变化比较大,而采用改进的HON-LON和HPWM-LON相结合的调制方式时,电流变化比较平稳。
6 结论
本文提出的算法能有效地降低无刷直流电机的转矩脉动,并且具有不改变硬件结构,只通过软件算法降低转矩脉动的优势。基于uPD78F91213芯片的控制系统在市场上有高的性价比。该芯片已经成功地应用于无刷直流电机的电动助力车中,并得到了良好的性能,实验证明,在无刷直流电机应用中,该控制系统和控制算法方便、实用,效果明显。
[1]Ilhwan Kim,Nobuaki Nakazawa,Sungsoo Kim,etal.Compensation of Torque Ripple in High Performance BLDC Motor Drives[J].Control Engineering Practice,2010,18(10):1166-1172.
[2]Tingna Shi,Yunta Guo,Peng Song,etal.A New Approach of Minimizing Commutation Torque Ripple for Brushless DC Motor Based on DC-DC Converter[J].Industrial Eletronics,IEEE Transaction on,2010,57(10):3483-3490.
[3]Zhu xiaoyong,Cheng ming,chau K T,etal.Torque Ripple Minimization of Flux-controllable Stator-permanent-magnet Brushless Motors Using Harmonic Current Injection[J].Journal of Applied Physics,2009,105(7):07F102-07F103.
[4]王正仕,张朝立.直流无刷电机换相转矩脉动抑制研究[J].控制工程,2010,17(3):332-350.
[5]李自成,程善美.减小无刷直流电机转矩脉动的PWM新方法[J].华中科技大学学报,2009,37(11):1-4.