模糊控制在无位置反馈再生气加热炉上的应用
2012-09-22,
,
(1.中油管道机械制造有限责任公司 仪表及撬装设计研究所,河北 廊坊 065000;2.华北电网廊坊供电公司 调度所,河北 廊坊 065000)
1 引言
石油号称“工业的血液”,在世界的任何角落,石油是必不可少的。加热炉是长输管道和油田生产中广泛使用的设备,在石油长输管道以及油田生产中占有重要的地位。再生气加热炉是常见的加热炉之一,以天然气为被加热介质,大多采用管式直接加热方式,将天然气加热到200~300℃后进入分子筛脱水。燃烧器是加热炉的核心组成部分,按控制方式分为两段式和比例式2类,其中比例式可控性强。比例式燃烧器可选配滑动式反馈电位计,用以指示燃烧器负荷大小。但是滑动式反馈电位计存在着价格高、易受干扰、易损坏等缺陷,给加热炉日常运行和维护带来不便。模糊控制是在总结人类自然语言概念、操作经验的基础上,模仿人类智能的一种控制方法[1]。利用累计下来的操作经验,不依赖精确的数学模型,对加热炉系统采取模糊控制,有望达到良好的效果。
2 被控系统简介
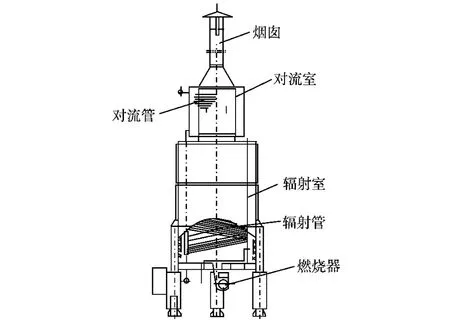
图1 再生气加热炉结构Fig.1 The structure of resurgent gases furnace
再生气加热炉结构如图1所示。炉体包括辐射室、对流室、烟囱等,下部为辐射室,上部为对流室和烟囱,立式布置,底烧式结构。再生气先进入对流室,再进入辐射室,充分换热,热效率可达80%以上。燃烧器是加热炉的核心组成部分,几大常见品牌有:Baltur、Oilon、Saacke、Weishaupt等。本系统采用的是Baltur TBG120LX ME燃气比例式燃烧器(以下简称TBG120)。TBG120燃气量和助燃风量均由蝶阀控制,分别由两个伺服电机驱动。TBG120配备Dungs MPA 22电子式程控器,控制燃烧器点火、燃料与助燃风匹配、安全回路切断等。TBG120可在助燃风门伺服电机上安装滑动式反馈电位计,通过反馈回来的电阻值来指示当前风门的开度。由于燃烧器处于室外、风门伺服电机靠近热源、燃烧器风门开关频繁等因素,滑动式反馈电位计在使用过程中表现出精度偏低,易受干扰,使用寿命短等缺点,有些站场甚至数月就需要更换一次。加热炉是一个典型大惯性、纯滞后、多变量、复杂时变系统,而且各工艺参数间具有强耦合特性[2]。模糊控制不需要知道对象的数学模型,能实现对非线性系统的控制,对对象参数的变化有较强的适应性[3]。在加热炉上使用模糊控制有望达到不错的效果。
3 系统硬件设计实现
该系统硬件部分实现起来很简单,控制元件选用 PLC,CPU型号为西门子S7-200CPU 224XP CN,配备热电阻输入模块EM231CN RTD。用热电阻测量再生气出炉温度,通过EM231CN RTD模块传给PLC作为系统的输入,如图2所示。

图2 系统输入Fig.2 The input of the system
系统的输出部分如图3所示。

图3 系统输出Fig.3 The output of the system
4 系统软件设计实现及结论
4.1 定义变量
系统输入PV(再生气出加热炉温度),SP(再生气出炉温度设定值)。系统输出U1(开风门),U2(关风门)。中间变量E=SP-PV;T1为调节周期;DPV=PVn-PV(n-1),其中PVn代表本调节周期的系统输入,PV(n-1)代表上个调节周期的系统输入;T2为误差累计周期;IE=En+E(n-1),En代表本误差累计周期的系统误差,E(n-1)代表上个误差累计周期的系统误差(只在系统处于NM和PM之间时累加);QE误差累计临界值。T3,T4,T5,T6为调节风门时间,其中T3>T4>T5>T6。
4.2 模糊化
误差E的论域如图4所示。系统要求将再生气温度加热到300℃,控制精度1%。根据控制要求,论域中各标记取值如下:ENB=-10,ENM=-6,ENS= -3,EZO=0,EPS=3,EPM=10,EPB=30,其划分的区间分别用E1到E8表示。

图4 误差论域Fig.4 The universe of discourse of error
图5为温度变化速率DPV的论域。根据燃烧器热负荷和加热炉热效率,将各标记值取值如下:DNB=-3,DNM=-1.5,DNS=-0.5,DZO=0,DPS=0.5,DPM=1.5,DPB=3,其划分的区间分别用D1到D8表示。

图5 温度变化速率论域Fig.5 The universe of discourse of temperature variance ratio
4.3 规则库
规则库语句定义如下。升温阶段:1)E≥EPB,伺服电机控制风门完全打开。2)EPM≤E<EPB,控制温度变化速率在1.5℃/min到3℃/min之间。当DPV≥3℃/min时,关风门T3;当0.5℃/min≤DPV≤1.5℃/min时,开风门T5;当0≤DPV≤0.5℃/min时,开风门T4;当DPV≤0,开风门T3。3)EPS≤E<EPM,控制温度变化速率在0.5℃/min到1.5℃/min之间。当DPV≥3℃/min时,关风门T3;当1.5℃/min≤DPV≤3℃/min时,关风门T4;当0≤DPV≤0.5 ℃/min时,开风门T5;当 -0.5℃/min≤DPV≤0时,开风门T4;当DPV≤-0.5℃/min时,开风门T3。4)EZO≤E<EPS,控制温度变化速率保持在0.5℃/min以内。当DPV≥3℃/min时,关风门T3;当1.5℃/min≤DPV≤3℃/min时,关风门T4;当0.5℃/min≤DPV≤1.5 ℃/min时,关风门T5;当 -0.5℃/min≤DPV≤0 时,开风门T5;当 -1.5℃/min≤DPV≤-0.5℃/min时,开风门T4;当DPV≤-1.5℃/min时,开风门T3。降温阶段规则与升温阶段相同,只是开关风门动作相反。在此调节规则基础上引入误差累计临界值QE,将误差累计值与临界值比较来限制误差控制精度范围内的系统输出。当系统误差处于ENS和EPS之间时开始计算累计误差IE,如果IE>QE,说明稳态时系统温度未达到设定点的时间偏多,则DNS<DPV<DPS时禁止关风门;如果IE<-QE,说明稳态时系统温度超过设定点的时候偏多,则DNS<DPV<DPS时禁止开风门。根据规则库语句定义制定模糊控制规则表如表1所示。其中“+”代表开风门,“-”代表关风门,“0”代表风门不动作。

表1 模糊控制规则表Tab.1 Rule list of fuzzy control
4.4 解模糊化
1)通过触摸屏向PLC输入系统的设定值SP,调节周期T1,误差累计周期T2,风门调节时间T3,T4,T5,T6,误差累计临界值QE,误差标记值,温度变化速率标记值。2)在PLC的每个扫描周期内计算系统误差E。在每个调节周期T1内计算温度变化速率DPV,并将其换算成℃/min。在每个误差累计周期T2内且误差ENS<E<EPS时计算误差累计值IE。3)根据误差标记值和温度变化速率标记值确定E和DPV在论域上的隶属关系,并置位相应的标识位(如E3、D5)。将IE与QE比较,当IE≤QE时,置QE1位为“1”;当IE≥-QE时,置QE2位为“1”。4)依据模糊控制规则表编制开负荷控制程序、关负荷控制程序分别如图6、图7所示。5)系统正常运行时根据PV值的曲线调整各参数值,调整后的参数如下:SP依据现场要求,一般设定为280℃,T1=30s,T2=20s,T3=1.2s,T4=0.8s,T5=0.4s,T6=0.2s,QE=8.7℃。
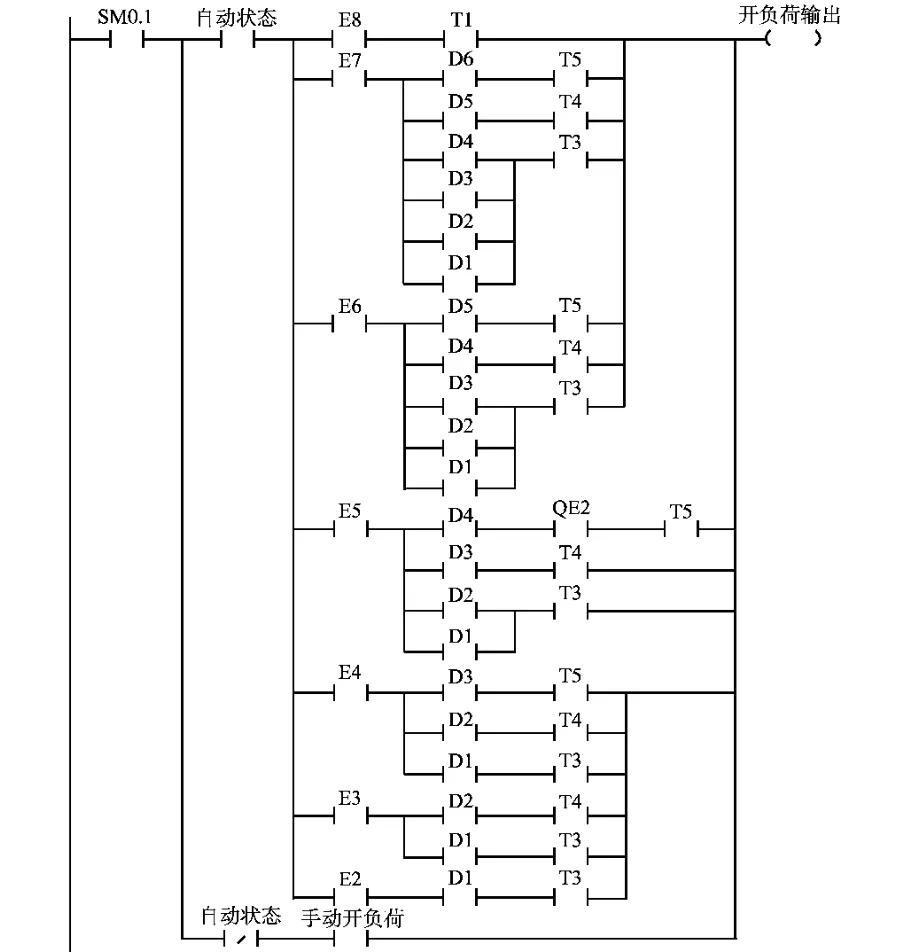
图6 开负荷控制程序Fig.6 The control program to increase load

图7 关负荷控制程序Fig.7 The control program to decrease load
采用模糊控制,对比例式燃烧器采用开关控制,避免使用反馈电位计和伺服放大板,达到了较好控制效果,同时减少了日常运行维护的工作量和成本。站场运行1a来系统稳定未出现过问题。但是程序可读性不够高,调试过程较为繁琐,而且该程序没有自我学习功能,当站场条件发生较大改变时需要重新设置参数,有待改进。
[1]李慧,安幼林,李晨.基于COM组件的开放式故障诊断系统框架研究[J].仪表技术,2009(4):36-38.
[2]黄翼虎.长输原油管道加热炉自控技术的研究[D].杭州:浙江大学,2005.
[3]樊丁,于普文,吴琪华.模糊控制理论在航空涡轮喷气发动机控制系统中的应用[J].航空学报,1993,4(4):145-152.