过程控制系统的前馈反馈复合控制器设计*
2012-02-05李兴春李兴高
李兴春,李兴高
(1.五邑大学信息工程学院,广东 江门 529020;2.北京交通大学土建学院,北京 100044)
过程控制系统的前馈反馈复合控制器设计*
李兴春1,李兴高2
(1.五邑大学信息工程学院,广东 江门 529020;2.北京交通大学土建学院,北京 100044)
随着对过程控制系统性能要求的不断提高,传统反馈控制策略难以适应不同工况下被控对象动态特性的改变。提出了前馈-反馈复合控制策略,研究了前馈控制器在物理上不可实现情况下的设计方法,给出了具体操作步骤。在过程控制系统中应用的仿真结果表明:前馈-反馈复合控制能够将可测扰动在影响系统输出前得以补偿;系统的动态性能和稳定性能均优于传统反馈控制。解决了扰动通道时滞小于主控通道时,前馈控制器在物理上不可实现的技术难题,对过程控制系统有一定理论意义和工程参考价值。
过程控制;时滞;前馈控制;复合控制器;IMC控制
0 引言
理想的过程控制系统要求被控参数在过程特性呈现大滞后(包括容量滞后和纯滞后)和多干扰的情况下,必须持续保持在工艺所要求的数值上。但是,传统的反馈控制不能实现这种目标。这是因为,反馈控制器只有在输入被控参数与给定值之差产生后才能发出控制指令。即系统在控制过程中必然存在偏差,因而不可能得到理想的控制效果。
前馈控制又称干扰补偿控制,早在1925年应用于气泡水位调节中[1]。它与反馈控制不同,它是依据引起被控参数变化的干扰大小进行调节的。在这种控制策略的系统中,当干扰刚刚出现而又能测出时,前馈控制器便发出调节信号使调节参数作相应的变化,使调节作用与干扰作用及时抵消于被控参数产生偏差之前。因此,前馈控制对可测干扰的克服要比反馈控制快。然而,如果过程控制系统中存在强干扰,特别是低频干扰,或者系统的稳态精度和响应速度要求很高时,通常是将前馈控制与反馈控制相结合,组成前馈-反馈复合控制系统。该复合控制系统一方面利用前馈控制及时有效地减少干扰对被控参数的动态影响;另一方面则利用反馈控制使被控参数稳定在设定值上,从而保证系统有较高的控制质量。在工程实践中,由于前馈控制器在物理上有时很难实现,导致前馈-反馈复合控制器设计成为一个技术难题。教材中也是一提而过,没有做深入探讨。文献[2]提出了串级-Smith预估控制,其实为双回路反馈控制;文献[3-7]提出了超前-滞后前馈控制其模型,但没考虑反馈回路的影响;文献[8-12]在进行前馈控制器设计时考虑到反馈回路的影响,但对于扰动通道时滞小于主控通道时,即控制器在物理上不可实现的情况下没能给出控制器整定规则,因此,有必要开展该类控制策略的研究。
1 问题描述
复合控制系统的结构框图如图1所示。

图1 复合控制系统的结构框图
其中:Pfd为反馈控制器传递函数;
P为被控对象的传递函数;
Pff为前馈控制器传递函数;
Pd为干扰通道传递函数。
为了便于分析,将图1进行等效变换为图2。从补偿原理来看,前馈控制实际上是采用开环控制方式去补偿可测量的扰动信号,故前馈控制并不改变反馈控制系统的特性。从抑制扰动的角度来看,前馈控制可以减轻反馈控制的负担,所以反馈控制系统的增益可以取得小一些,以利于系统的稳定性。

图2 复合控制系统的等效结构框图
由图2可知扰动对系统的输出的影响由下式描述:
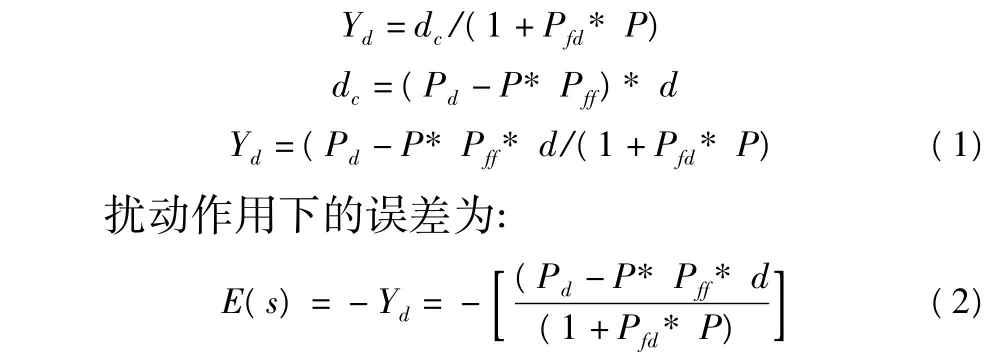
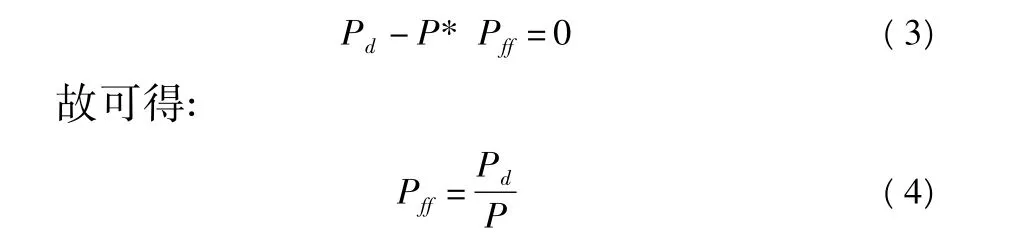
为消除扰动对系统输出的影响,令式(2)的分子项为零,即:
2 复合控制器设计
2.1 反馈控制器Pfd的设计
反馈控制器Pfd采用文献[9]中的IMC控制设计及参数整定方法,故图2.2变换为图3所示。
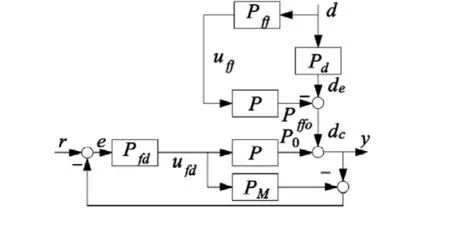
图3 IMC复合控制系统结构框图
式中,Tf滤波器参数为所希望的闭环时间常数,根据经验公式Tf一般可取为开环系统时间常数的一半;nf滤波器的阶数为一正整数,通过选择nf的大小,可使Pfd的分母阶次大于或等于分子的阶次,从而保证Pfd既稳定又可物理实现。τ为调整参数,根据反馈控制的基本原理(要使系统能够正常工作,构成系统开环传递函数静态增益的乘积必须为正)来确定τ=+1;还是τ= -1。
2.2 前馈控制器Pff设计
由式(4)可以看到,当干扰通道时滞时间常数小于主控通道时滞时间常数时,前馈控制器Pff,在物理上是不可以实现的。
由式(1)可得可测扰动对系统输出净影响(不考虑扰动对反馈通道的影响)。即:dC。

其中,PM为被控对象的估计模型。在这里我们假期被控对象与估计模型完全匹配,即PM=P。
在设计内模控制器时,先将被控系统的传递函数分解为两个因式的乘积,即令:
其中,ρi为Pd的第i个极点的时间常数。
(5)根据系统的输出响应情况,调整滤波器时间常数τd,直至满足要求为止。
3 仿真分析
在过程控制中,许多高阶系统都可以用一阶惯性+纯滞后环节进行近似,以简化分析与综合过程。为检验本复合控制器设计方法的有效性,以一阶惯性+纯滞后环节为例。各过程的传递函数如下所示。
图4为可测扰动对系统输出的净影响。由图可见系统输出时间响应曲线出现了长尾巴效应,这一现象由延时环节所致。
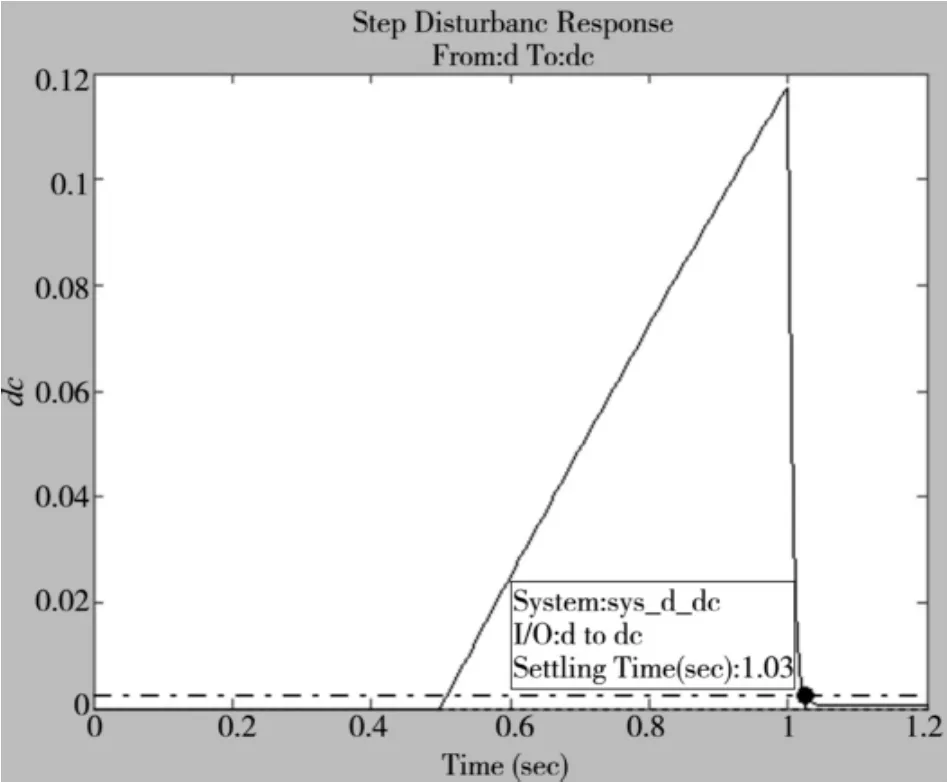
图4 可测扰动对系统输出的净影响
通过图5可见,前馈控制器设计时应考虑反馈回路的影响,同时反馈回路会弱化控制作用和增加响应曲线的上升时间。
图6为无前馈控制器时,系统的阶跃响应情况。若不能将可测扰动及时地消除,将会导致系统输出响应出现高超调量、长调整时间以及大稳态误差的情况。
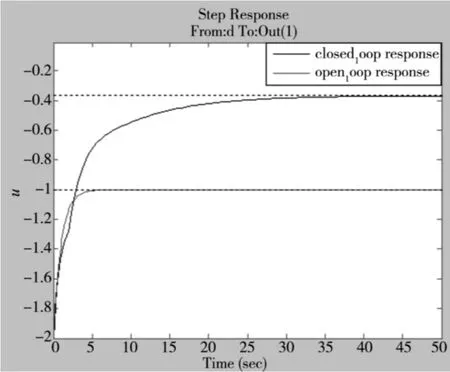
图5 可测扰动对控制作用的影响图

图6 典型IMC控制下的系统响应
采用前馈-反馈复合控制策略时,系统的阶跃响应情况如图7、图8和图9所示。由图可见,复合控制系统在动态性能和稳态精度都优于无前馈控制器时的系统。表1给出了具体动态性能指标。
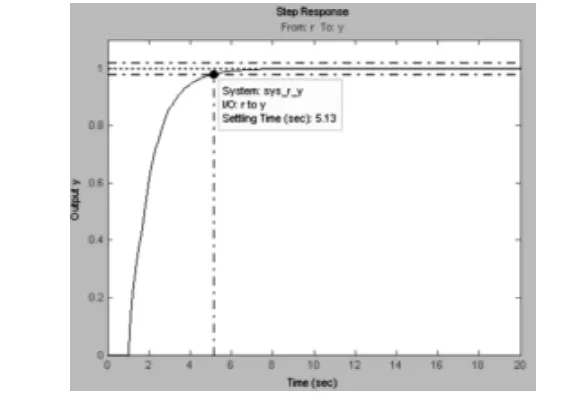
图7 系统的阶跃响应
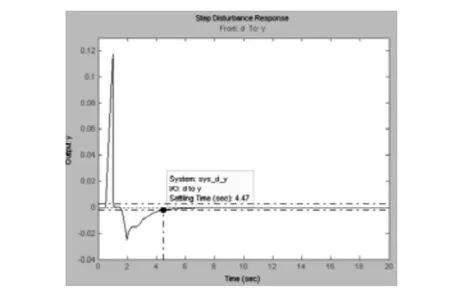
图8 系统的阶跃扰动响应

图9 系统的双输入单输出响应

表1 复合控制与IMC控制性能比较
4 结束语
理想的过程控制系统要求被控参数在过程特性呈现大滞后(包括容量滞后和纯滞后)和多干扰的情况下,必须持续保持在工艺所要求的数值上。但是,传统的反馈控制不能实现这种目标。提出了前馈-反馈复合控制策略,研究了前馈控制器在物理上不可实现情况下的设计方法,给出了具体操作步骤。在过程控制系统中应用的仿真结果表明:前馈控制器设计应考虑反馈回来的影响;前馈-反馈复合控制能够将可测扰动在影响系统输出前得以补偿;由仿真结果和表1可知系统的动态性能和稳定性能均优于传统反馈控制。解决了扰动通道时滞小于主控通道时,前馈控制器在物理上不可实现的技术难题,对过程控制系统有一定理论意义和工程参考价值。
[1]D.Seborg,T.Edgar,D.Mellichamp,Process Dynamics and Control[M],Wiley,New York,1989.
[2]邹丽,杨献勇.复合控制在过热气温控制中应用的仿真研究[J].锅炉技术,2003(34)5:1-4.
[3]A.Nisenfeld,R.Miyasak,Application of feedforward control to distillation columns[J],Automatica 9(1973)319 -327.
[4] F.Shinskey,Process Contorl Systems,Application Design Adjustment[M],McGraw-Hill,New York,1996.
[5] D.R.Coughanowr,Process Systems Analysis and Control[M],McGraw-Hill,New York,1991.
[6]C.Brosilow,B,Joseph,Techniques of Model-Based Control[M],Prentice-Hall,New Jersey,2002.
[7]A.Isaksson,M.Molander,P.Moden,Low-Order Feedforward Design Optimizing the Closed-Loop Response[C],Preprints,Control Systems,2008,132 -138.
[8]J.Lee,D.H.Kim,T.F.Edgar.Static decouplers for controlof multivariable processes[J],AICHE Journal 51(2005)2712-2720.
[9]Y.Lee,S.Park,M.Lee,C.Brosiow.PID controller tuning for desired closed-loop response for SI/SO system[J],AIChE J 44(1)(1998)106-115.
[10]J.Garrido et al.An extended approach of inverted decouping[J],Journal of Process Control21(2011)55 -68.
[11]W.L.Luyben.Simplemethod for tuning SISO controller in multivariable sytems[J],Ind.Eng.Chem.ProcessDes Dev.25(1986)654-660.
[12]M.Lee,K.Lee,C.Kim,J.Lee.Analytical design ofmultiloop PID controllers for desired closed-loop responses[J],AIChE J.50(2004)1631 -1635.
(编辑 赵蓉)
Feed forward-feedback Com posite Controller Design of Process Control Systems
LIXing-chun1,LIXing-gao2
(1.College of Information and Engineering,WUYIUNIVERSITY,Jiangmen Guangdong 529020,China;2.School of Civil and Architectural Engineering,Beijing Jiaotong University,Beijing 100044,China)
Along w ith the process control system performance requirements of the constant improvement,the traditional feedback control strategy is difficult to adapt to the different conditions of the controlled object dynamic characteristics.The feedforward-feedback hybrid control strategy is proposed,The design method and the specific operation steps are given to design the feedforward controller which does not realize in physics.The simulation in a process control system results show that:Feedforward-feedback compound control tomeasurable disturbance in effectbefore the system output to compensation;The dynamic function and the stable performance are better than traditional feedback control.The feed-forward controller in physics not realized technology problem is solved,having a certain theoreticalmeaning and reference value for engineering.
process control;time-delay;feedforward control;composite controller;IMC-control
TP273+.3
A
1001-2265(2012)06-0064-03
2011-11-18
国家自然科学基金项目(50978017)
李兴春(1976—),男,山东邹城人,五邑大学信息工程学院讲师,硕士研究生,主要研究方向过程控制系统的理论分析与综合,(E-mail)13822386758@139.com。