基于虚功原理的4PUS-1RPU并联机构动力学分析*
2012-02-05宋小科杨晓钧
宋小科,杨晓钧
(1.上海航天设备制造总厂,上海 200245;2.哈尔滨工业大学深圳研究生院,深圳 518055)
基于虚功原理的4PUS-1RPU并联机构动力学分析*
宋小科1,杨晓钧2
(1.上海航天设备制造总厂,上海 200245;2.哈尔滨工业大学深圳研究生院,深圳 518055)
针对含中央约束支链的4PUS-1RPU并联机构,推导了机构内各构件的速度、加速度和系统输出速度、加速度间的运动学传递关系,求解了机构各条支链的雅克比矩阵,运用虚功原理建立了4PUS-1RPU并联机构的动力学模型。运用MATLAB编写了该模型的仿真程序,进行了逆动力学仿真,为该机构动力学特性的深入分析和控制策略的研究提供了参考。
并联机构;中央约束支链;动力学模型;虚功原理
0 引言
和串联机构相比,并联机构具有刚度大、承载能力强、误差不叠加等优点[1],因此广泛应用在科学研究和工程领域,并引起了国内外学者的关注。与最早出现的6自由度并联机构Stewart相比,少自由度并联机构因自由度减少,机构构件和运动副都相应减少,结构变得简单,因此成本降低,适用于某些不需要6自由度运动的工作场合[2]。其中含中央约束支链的少自由度并联机构,将约束集中于中央约束支链,简化了结构设计,易于控制,承载能力强,因此具有很高的理论研究和实用价值[3]。
动力学建模是并联机构研究中的一个重要方面,对于实现机构控制、提高运动精度和运动过程的平稳性等具有重要的理论和现实意义。并联机构刚体动力学建模的方法,包括牛顿-欧拉法、拉格朗日法[4]、拉格朗日-达朗贝尔法、微分几何原理、虚功原理、凯恩方程[5]等。其中,牛顿-欧拉法建模过程中会出现大量的内力和约束,建模过程复杂;拉格朗日法建模中需要进行动力学函数的求导,计算量大;虚功原理将机构作为一个整体考虑,不计算机构的内力,得到的动力学方程简单整齐。本文以哈尔滨工业大学的一台含中央约束支链的4PUS-1RPU并联机床原型样机为研究对象,采用虚功原理对机床的运动机构进行动力学建模,研究机构驱动力和机构运动参数间的关系,为机床控制策略的研究奠定基础。
1 运动学分析
4PUS-1PUR并联机构如图1所示[6],为了分析的方便,在并联机构上设立定坐标系A(XA,YA,ZA)、坐标系 B(XB,YB,ZB)、坐标系 Ci(xi,yi,zi)、坐标系D(xo,yo,zo),其中坐标系 A固定在定平台上,坐标系B固定在动平台上,在原始状态下,A和B互相平行。局部坐标系Ci固定在定长杆Hi上,zi轴方向与CiBi重合,yi轴方向平行于CiBi和OAOB的叉积,xi方向由右手定则决定。局部坐标系D固定在支链RPU上,zo轴方向和OAOB相同,xo方向和XA相同,yo方向由右手定则决定。

图1 4PUS/1RPU并联机构示意图
动平台的位姿由位置向量p和旋转矩阵ARB决定,其中,并联机构姿态由RPY角决定,设绕x轴旋转γ角,绕y轴旋转β角,绕z轴旋转α角,则:

1.1 位置分析



式中,c1——从OA点到P副下半部分重心o1的距离;
c2——从OB点到P副上半部分重心o2的距离。

图2 PUS支链示意图

图3 RPU支链示意图
1.2 速度分析
对于点Bi的速度,可以通过对公式(8)的右边对时间求导得到,如下所示:

式中,˙Li——滑块的速度;
iωi——定长杆Hi的角速度,表示在坐标系Ci下。
对公式(18)的两边点乘ihi可得:

因为定长杆Hi两端分别为S副和U副,不能饶自身方向矢量hi旋转,所以ωTihi=0。对公式(18)两边叉乘ihi可得:

公式(19)决定了滑块的线速度,公式(20)决定了定长杆的角速度。这样,通过对公式(12)、(13)求导,可以得到滑块质心的速度和定长杆质心的速度,如下所示:

公式(26)、(27)分别表示了RPU支链移动副移动杆相对于固定杆的线速度和移动副的角速度,这样,移动杆和固定杆的质心速度可以通过对公式(15)、(16)求导得到,如下所示:

1.3 加速度分析
对于点Bi的加速度,可以对公式(17)求导得到:

公式(33)求出了滑块相对于滑道的线加速度,公式(34)求出了定长杆的角加速度,因此,滑块质心的加速度和定长杆质心的加速度可以通过对公式(22)、(23)求导得到,如下所示:
公式(39)决定了RPU支链P副中移动杆相对于固定杆的线加速度,(40)决定了P副的角加速度,这样,可以求解固定杆质心的加速度和移动杆质心的加速度,通过对公式(28)、(29)的求导,如下所示:

1.4 构件雅克比矩阵



2 动力学分析
并联机构的逆动力学问题,即在给定动平台运动路径的情况下,求解能够得到给定运动的输入力。本文采用虚功原理来求解输入力。
2.1 外部力和惯性力
对于动平台,作用在质心的外力和惯性力有以下形式:

2.2 动力学方程
虚功原理可以写成以下形式:

因为公式(80)对任意的δxP都成立,所以[7]:

公式(81)描述了4PUS/1RPU的动力学特性。因为公式中的外力都是描述在构件的质心处,所以如果有外力作用在构件的非质心处,应该将其转换到质心处,再带入方程。
将公式(56),(57),(68),(69) 带入公式(82),化简可得:

由上式可得,输入力的求解依赖于JP的逆变换,因此,当机构到达奇异位形时,输入力就变得不稳定。
3 数值仿真
建立并联机构的动力学模型后,可以采用MATLAB编程,得到机构驱动力的可视化仿真结果。进行仿真时,需要选择典型的机构运动轨迹,本文分别选择平动、转动作为运动轨迹进行仿真。
进行平动运动时,选择绕YZ平面中的一个点进行平动,轨迹方程如下所示:

式中,r——动平台作圆周运动的半径;
ω——动平台作圆周运动的角速度。
取r=0.1,ω =π,所受外力和外力矩fe=0,ne=0,机构运动时只受重力作用,则各支链驱动力的变化如图4所示。

图4 并联机构平动时驱动力变化示意图
进行转动运动时,选择在点(0,0,1)处分别绕X轴、Y轴转动,绕X轴转动时轨迹方程如下所示:

式中,α(t)——动平台与X轴夹角;
β(t)——动平台与Y轴夹角;
φ——动平台转动时的最大角度;
ω——动平台转动角速度。
取φ=0.35,ω =π,所受外力和外力矩fe=0,ne=0,各支链驱动力变化如图5所示。
绕Y轴转动轨迹方程如下所示:

φ、ω、外力取值和绕X轴转动相同,各支链驱动力变化如图6所示。
从图5~图6可以看出,机构在运动时驱动力变化平滑,没有奇异和突变,表明该并联机构具有优越的性能。驱动力都成正弦或余弦变化,与机构进行的运动有关。在机构平动和绕X轴转动时,驱动力1,4和2,3基本对称,这是因为机构的支链1,4和2,3对称,绕Y轴转动时,驱动力1,4和2,3基本相等,机构关于Y轴不对称,但关于X轴对称。

图5 并联机构绕X轴转动时驱动力变化示意图
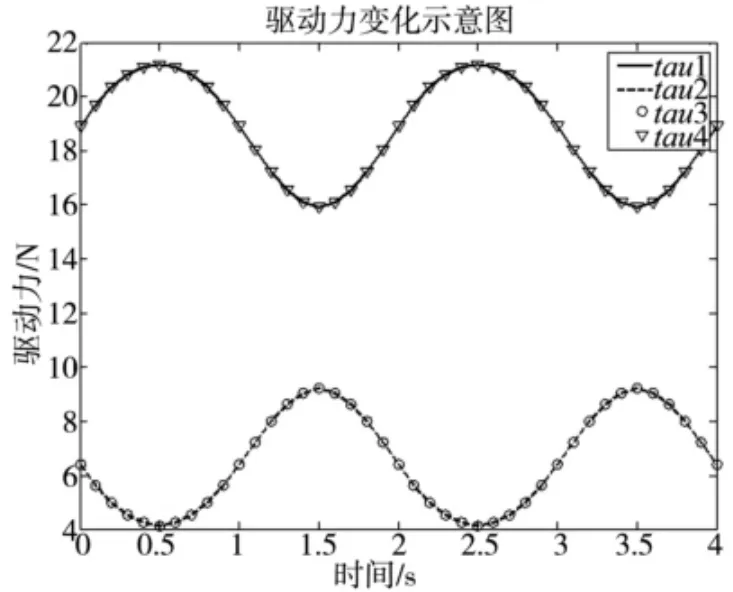
图6 并联机构绕Y轴转动时驱动力变化示意图
4 结束语
本文利用虚功原理建立了并联机构的动力学模型。首先建立了适合分析的局部坐标系,然后利用矢量法分析了机构各构件在局部坐标系中的速度和加速度,求出了各支链构件速度与机构输出速度间的雅克比矩阵,在考虑了各构件所受外力的情况下利用虚功原理建立了机构的动力学模型。在此基础上,利用MATLAB编程,仿真了机构在平动和转动时机构的驱动力变化情况。证明了动力学模型的正确性,为并联机构驱动系统和控制系统的设计奠定了基础。
[1]丛爽,尚伟伟.并联机器人——建模、控制优化与应用[M].北京:电子工业出版社,2010.
[2]李秦川.对称少自由度并联机器人型综合理论与新机型综合[D].秦皇岛:燕山大学,2003.
[3]杨建新,郁鼎文,王立平.汪劲松并联机床研究现状与展望[J].机械设计与制造工程,2002(5):10-13.
[4]金灵,吴建勇,计时鸣,等.并联机构动力学建模及控制策略的研究[J].机电工程,2006,23(6):30-34.
[5]代小林,丛大成,韩俊伟,等.基于凯恩方程的并联运动平台多刚体动力学建模[J].液压气动与密封,2008(4):60-63.
[6]胡颖.含约束链混联平台型机床的机构分析及其稳健优化研究[D].哈尔滨:哈尔滨工业大学,2007.
[7]Lung-Wen,Tsai.Solving the Inverse Dynamics of a Stewart-Gough Manipulator by the Principle of Virtual Work[J].Journal of Mechanical Design.2000,122:3 -9.
(编辑 李秀敏)
Dynam ics Analysis of a 4PUS-1RPU Parallel Manipulator by the Princip le of VirtualWork
SONG Xiao-ke1,YANG Xiao-jun2
(1.Shanghai Aerospace Equipments Manufacturer,Shanghai200245,China;2.Shenzhen Graduate School Harbin Institute of Technology Shenzhen,Guangdong 518055,China)
According to the 4pus-1rpu parallelmechanism w ith a central constraint chain,this paper derives the velocity and acceleration transmission relationships between the component of the mechanism and the system output,solves the link Jacobean matrices,establishes the dynamic model based on the principle of virtualwork.The simulation program of themodel is developed using MATLAB,and the inverse dynam ic characteristics are simulated,this provides a reference for the research of the parallel mechanism of dynamic characteristics analysis and control strategy.
parallelmanipulator;central constraint chain;dynamicsmodel;virtual work
TH113
A
1001-2265(2012)06-0025-06
2011-10-08;
2011-11-23
上海市科学技术委员会的资助(10dz2250300)
宋小科(1986—),男,河南人,上海航天设备制造总厂硕士研究生,主要研究方向为并联机床,(E-mail)xiaoke0379@163.com。