永磁同步电动机过载特性及其控制策略
2011-06-02王广生黄守道
王广生, 黄守道, 高 剑
(湖南大学电气与信息工程学院,湖南长沙 410082)
0 引言
近年来,随着微电子技术、新型电机控制理论和稀土永磁材料的快速发展,永磁同步电动机(Permanent Magnet Synchronous Motor,PMSM)得到了迅速推广使用,对其性能要求也越来越高,特别对过载能力的要求,而一般异步电机的过载能力低速时为额定转矩的1.8倍,高速时为额定转矩的1.2倍,过载持续时间是60 s。一般情况下,PMSM的最大转矩约为额定转矩的2.2倍。
现在具有平均运行效率高、功率因数高、起动力矩大、过载能力强、高效节能等特点,在电动汽车及牵引电机的领域使用较普遍。由于永磁电机励磁电流无法改变,需要通过调节定子电流来控制,且永磁电机磁场恒定,反电势系数与转矩系数之间的关系固定,要实现低速度大转矩,高速度时就会产生较高的电压和较大的反电动势,要获得稳定的最大转矩输出,需要有相应的控制策略。本文采用电机本体设计与控制方法相结合的方式来提高PMSM的最大转矩值,并通过MATLAB仿真验证了PMSM最大转矩特性及其相应的控制策略的可行性,为下一步研究打下了基础。
1 PMSM dq轴数学模型及转矩特性
PMSM忽略铁心饱和及电机绕组漏感,假设气隙中磁势呈正弦分布,忽略磁场的高次谐波。运用坐标变换理论,就可以得到在恒功率时同步旋转的两相坐标系下的数学模型。
电压方程可表示为


d、q轴电流分量可以表示为


式中:Ud,Uq——d、q 轴电压;
id,iq——d、q 轴电流;
rs——定子绕组电阻;
Ld,Lq——d、q 轴电感;
Ψd,Ψq——d、q轴磁链;
Ψf——永磁体的主磁链;
ωr——转子角频率;
p——微分算子,d/dt;
pm——电机极对数。
忽略定子电阻,稳态运行时PMSM的电磁转矩及运动方程为

Ip——电枢电流的幅值;
β——电枢电流向量超前q轴的电角度。
电磁转矩方程可表示为
图1~图7是6.3 kW PMSM在额定负载与过载情况下的转矩、磁密随时间的波形,可以看出开始起动时会发生振荡,且转矩幅值较大,经过一段时间后,转矩平稳的围绕固定值摆动。
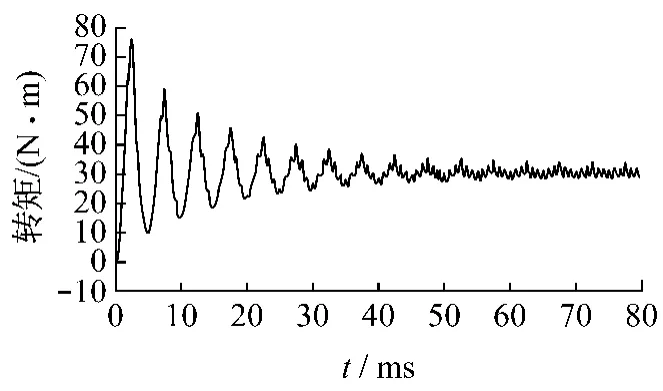
图1 额定负载Sn=2 000 r/min,P=6.3 kW时永磁电机转矩-时间波形图

图2 过载时永磁电机转矩-时间波形图

图3 额定负载Sn=2 000 r/min,P=6.3 kW 时,永磁电机的气隙磁密-电角度波形图

图4 额定负载Sn=2 000 r/min,P=6.3 kW时永磁电机的磁力线分布情况

图5 过载时永磁电机的磁力线分布情况
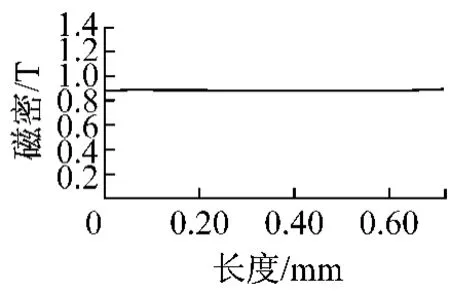
图6 额定负载Sn=2 000r/min,P=6.3 kW 时 永 磁电机的永磁体磁密长度图
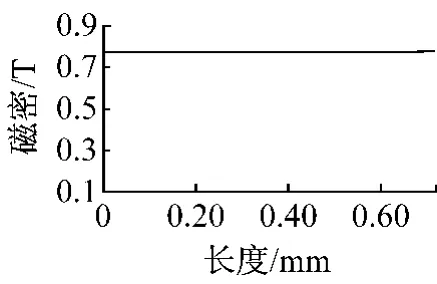
图7 过载时永磁电机的永磁体磁密长度图
PMSM的过载实际上就是破坏了电磁转矩与负载转矩的平衡。从PMSM矩角特性曲线来分析,开始时电动机工作于电磁转矩曲线与负载转矩曲线的交点,此时转矩角为某一固定值,该交点为非稳定工作点,如果有一个减少θ角的扰动,便会导致电动机加速,最后稳定于稳态工作点,如果有一个增加的角度扰动,即Tem<TL,导致电动机减速,进入一个近似椭圆形转矩-转速轨迹运行,想要使电机重新回到稳定状态,电机电磁转矩会增大,转速下降,电机总趋向于减小θ角的方向。因此考虑永磁电机过载倍数的问题转化为研究电机最大转矩的问题。
一般在设计PMSM时,首先考虑其主要尺寸,而永磁电机主要尺寸的确定受最大转矩和一些动态响应性能限制。

式中:A——定子电负荷的有效值;
Bδ1——气隙磁密基波幅值。

因此要想提高电机过载能力,只要增加电机的最大转矩输出即可。
2 永磁电机的过载分析及提高过载倍数的一些设计方法
电机过载是指电机的负载超过规定的额定负载的情况。一般电机都有一个固定的运行功率,称之为额定功率,如果在某种情况下使电机的实际使用功率超过电机的额定功率,则称该现象为电机过载。当电机过载时,相当于电机的负载转矩增大,电机的转速就会减慢,定子端的电流就会突然增大,温升变大,严重时会烧坏电机,故对电机过载特性的研究很有必要,可通过测量定子绕组的温度变化来判断电机是否过载。一般根据电机温升试验、转矩试验和材料测试试验结果,权衡利弊和成本后决定最终方案,使电机的过载问题得以解决。

PMSM的过载特性及其相应的控制能力不仅与电机本身的参数如直轴电枢反应电抗有关,还与逆变器容量及直流母线电压大小有关。下面是一些从电机设计角度考虑提高电机过载能力的方法,影响永磁电机过载的主要参数有凸极率、弱磁率、交直轴电枢反应电抗、气隙长度、极弧系数、空载漏磁系数等。利用场路结合计算方法,通过调整电机模型结构参数,计算分析其对电机过载参数和性能的影响。
2.1 气隙长度对电机参数的影响
设计永磁电机时,在同一模型其他尺寸不变的情况下,改变气隙长度,由表1所示试验数据显示,气隙的长度越大,空载漏磁系数就越大,漏磁越多。当调整气隙为0.5 mm时,PMSM功率因数为0.972,效率达到96.64%,可以看出电机具有较高的性能指标,所以在保证空载漏磁系数不太大的情况下可以适当增加气隙长度。

表1 不用气隙长度对电机参数的影响
2.2 永磁体磁化方向长度对电机参数的影响
设计永磁电机时,增加永磁体磁化方向长度hM可以减少直轴电抗,其磁化方向长度直接决定了电动机直轴电感的大小和永磁磁链的大小。故可明显提高电机的过载能力,但对恒功率区的弱磁扩速不利。hM是永磁体尺寸之一,它除了影响电机的运行性能外,还对电机中永磁体的空载漏磁系数有所影响。设计hM时应使永磁体工作于最佳工作点,同时由于bM直接决定了永磁体能够提供磁通的面积,因此在保证电动机磁负荷较高的情况下,可选择尽可能大的bM。在试验中,保持其他的尺寸不变,改变永磁体磁化方向长度,其对电机参数的影响如表2所示。表中漏磁系数是建立在Ansoft样机模型,然后分别选择永磁体与气隙路径进行电磁场数值计算得出的。试验数据显示hM越大,空载漏磁系数越小。图8显示了Ansoft中样机模型的空载磁力线发布。


图8 空载磁力线分布图
式中:δi——电动机的计算气隙长度;
τ2——电动机转子极矩;
Br/Bδ—— 一般取为1.1 ~1.35。
体育系统不断完善。2016年,广西有县级以上体育行政机构126个(含合署,下同),其中自治区体育局1个(机关处室9个、直属事业单位20个),设区市体育局14个,县(市、区)体育局111个。国家级高水平体育后备人才基地8个,自治区级高水平体育后备人才基地32个;国家级体育传统项目学校13所,自治区级体育传统项目学校63所。

表2 不用磁化方向长度对电机参数的影响
2.3 其他一些因素的影响
在设计永磁电机时,应加大交直轴电抗之差,在提高功率因数的同时,也能保证电动机过载能力、牵入同步能力。适当减少匝数、增大线径,使交、直轴电枢反应电抗减小,适当增加永磁体用量。一般较大的Xq和凸极率可以提高电动机的牵入同步能力、磁阻转矩和电动机的过载倍数,因此想设计高过载倍数的电动机可以充分利用大的凸极率所产生的磁阻转矩。设计时一般选内置式转子磁路结构,其转子磁路结构的不对称性所产生的磁阻转矩也有助于提高电动机的功率密度,从而提高PMSM的过载能力。
2.4 PMSM的控制及过载特性的研究
在一般电机的控制系统中,有时需要电机工作在高转矩的情况。对于PMSM,可以通过弱磁控制使转折速度增大,增大电机在最大转矩时刻速度能达到比较高的范围。在弱磁阶段时,电机的转矩性能主要取决于电机的控制策略,其方法和基速以下有所不同,首先在弱磁范围内进行的是恒功率调节,而不是恒转矩调节,其次弱磁范围内的调速是工作在基速以上的,是在全电压工作,工作电压在整个区段中起作用。
对于PMSM,在基速以下恒转矩调速,根据性能要求及控制目的,本文采用最大转矩/电流控制的电流控制方法,把产生不同转矩值所需的最小电流点连起来,就形成电动机的最大转矩/电流轨迹。但是,当PMSM运行在基速以上时,电动机相电压已经达到直流侧电压的最大值,通过电压获得更高转速已不太可能,故不能再扩大恒转矩作用时的最大速度,必须采用与弱磁控制相结合的电流控制方法才能使电机在最大转矩时速度达到更大。
定义k=Tmax/TeN为过载倍数,Tmax为电机运行的最大转矩,TeN是电机的额定转矩。对于隐极电机,从PMSM的电压方程(忽略定子电阻)和转矩方程可以得到此类电机在逆变器极限电压下电动机的转折速度:
将过载倍数带入式(12)得:

由于给定的 PMSM,其 TeN是恒定不变的,从式(13)可以看出,随着电机转折速度的减小,过载倍数会增大,即电机最大转矩越大转折速度越小。
对Ld=Lq的PMSM来说,由于转子磁路对称,磁阻转矩为0,因而电动机的最大转矩/电流轨迹就是q轴,一般考虑PMSM,多针对凸极式电机。在对于凸极式PMSM采用最大转矩/电流控制时,产生电机转矩所需的电流最小,可作Lagrange辅助函数如下,电动机的电流矢量应满足:

式中λ为拉格朗日乘子,对式(14)、式(15)分别求偏导数,令其为0,并对所得方程求解:

由式(16),可以得到PMSM采用最大转矩/电流控制且电流达到极限时(即最大转矩/电流轨迹与电流极限圆相交),电动机的直、交轴电流(忽略等效铁损和定子电阻对系统的影响):


当PMSM的端电压和电流均达到极限值时,由式(17)~式(19)和电压平衡方程可求得此时PMSM的转折速度ωb:

当电机运行于某一转速ω时,由电压方程可得到弱磁控制时的电流矢量轨迹:

此时转速的表达式为

当电压达到极限值时,电动机转速达到转折速度,迫使定子电流跟踪其指令值所需的电压差u-e0减少到0,逆变器的电流控制器开始饱和,定子中的直轴电流分量id与其指令值i*d之间的偏差Δid明显增大。因此,在建立控制系统时必须增加直轴电流负反馈环节。本文所采用的弱磁控制方式建立的仿真模型也采用直轴电流负反馈补偿控制的方法。
当PMSM控制器的极限输出电压umax和电流imax确定后,电动机对系统运行性能影响最为显著的参数包括 ψf、Ld、Lq、ρ和 ξ。由于不同的电动机参数会产生不同的电压和电流的矢量轨迹,因此在研究电动机过载特性时,有必要分析电动机参数变化对PMSM弱磁能力的影响。以下关于扩大恒转矩范围等的分析都是以凸极率和弱磁率为电动机参数进行的。这两个参数作为PMSM极为重要的参数,影响着整个系统的弱磁扩速性能,故在考虑时,应根据各自系统基速和弱磁调速范围对这两个参数进行综合设计。
将弱磁率与凸极率作为参数带入式(20)中,并对其进行标幺化处理和变形可得:

3 系统仿真及结果分析
根据流程图,用仿真软件MATLAB和Ansoft对PMSM驱动系统进行建模。整个模型包括单位电流最大转矩控制和弱磁控制算法模块,空间电压矢量控制模块,以及永磁同步电机和逆变器模块、测量模块。
图10、图11为仿真结果,永磁电机采用额定负载起动,转速达到2 000 r/min。

图10 额定转矩30 N·m时,转速-时间波形图

图11 最大转矩55.4 N·m时,转速-时间波形图
在最大转矩转折点时,电机转速理论应达到2 000 r/min,实际试验速度达到1 985 r/min,经公式算得的转折速度为1 987.21 r/min,通过最大转矩弱磁,使PMSM在恒转矩区范围最大速度达到1 990 r/min,即扩大了恒转矩区的调速范围,也即使PMSM过载能力得到加强。但进入恒功率区时的电机所需能量更多,即以牺牲一定的电能来换得较强的过载能力,如图12、图13所示。

图12 恒转矩区,非弱磁控制时PMSM转矩-转速特性

图13 最大恒转矩区时,比较弱磁与非弱磁控制PMSM转矩-转速特性
从电压极限椭圆和电流极限圆轨迹中,最大转矩电流轨迹与通过电压极限椭圆相交的点所对应的速度就是电动机在恒转矩区可以达到的最高速度,恒转矩值愈高,电压极限椭圆的两轴半径愈大,可以达到的最高速度愈低。从图12、图13可以看出,试验所得到的数据图与理论值式(24)相符合。

4 结语
本文利用内置式PMSM的特点,研究分析了PMSM最大转矩时的速度,并为其构建了相应的控制系统,通过MATLAB仿真对所建立的控制系统建模。仿真结果验证了通过弱磁最大转矩可以提高永磁电机在最大恒转矩时的速度。本文分析为进一步提高永磁电机的过载能力奠定了基础。
[1]唐任远.现代永磁电动机理论与设计[M].北京:机械工业出版社,2006.
[2]Schiferl R F,Lipo T A.Power capability of salientpolepermanent magnet synchronous mo tor in variable speed drive applications[J].IEEE Tram Ins Application,1990,26(1):115-123.
[3]周卫平,吴正国.SVPWM的等效算法及SVPWM与SPWM的本质联系[J].电机工程学报,2006,26(2):133-137.
[4]Soong W L,Miller T J E.Theoretical limitations to the field-weakening perfor-mance of the five classes of brushless synchronous AC motor drive[C]∥Proc Electr Mach Drives Conf,1993:127-132.
[5]高徐娇,赵争鸣,赵强.永磁同步电机的结构与电磁参数的关系分析[J].清华大学学报(自然科学报),2003,41(9):44 .
[6]张开明,钱东波,陈杰.永磁同步电动机弱磁控制的设计[J].微特电机,2009,36(9):42-45.
[7]尹华杰,林金铭,金振荣.永磁同步电动机的弱磁扩速分析[J].微电机,1995,28(2):11-15.
[8]张蔚,林明耀.场路结合法设计分析内置式永磁同步电动机[J].微特电机,2008,26(9):42-45.