直流架线式矿用电机车变频调速控制系统的设计
2011-06-02栗忠魁陈名辉
栗忠魁, 阮 毅, 宗 剑, 陈名辉, 陈 佳
(1.上海大学机电工程与自动化学院,上海 200072;
2.华中科技大学控制工程与科学系,湖北武汉 430074)
0 引言
矿用电机车采用直流电机驱动,因维护量大、维修费用高等问题面临技术改造;交流调速系统取代直流调速系统成为必然趋势[1]。
矿用电机车通常工作在比较恶劣的环境中[2-3]。供电系统稳定性差、轨道高低不平,致使供电很不稳定;机车需要频繁起动、制动、加速、减速,还要适应上、下坡和颠簸路况等情况。因此,在实际的工况中,要求电力机车的调速系统具有:带载能力强、起动转矩大、动态响应快,对瞬时断电、供电电压波动有很强的适应能力。针对上述要求,设计了基于无速度传感器的矿用电机车调速系统,试验证明该系统具有起动力矩大,鲁棒性好等优点。
1 矿用架线式电机车变频调速系统控制方案
1.1 异步电动机按转子磁链定向的矢量控制系统
异步电动机具有非线性、强耦合、多变量等性质,要获得良好的调速性能,必须从动态模型出发。矢量控制系统通过坐标变换和按转子磁链定向,可以将异步电动机动态模型等效为直流电动机模型,进而通过控制等效直流电动机来达到对异步电动机的控制[4]。
经过坐标变换得到异步电动机在任一旋转坐标系下的数学模型。
电压方程:

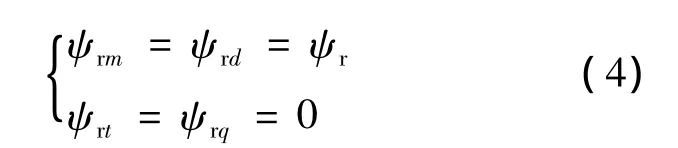
令dq坐标系与转子磁链矢量同步旋转,使d轴与转子磁链矢量重合,即为按转子磁链定向同步旋转坐标系mt。由于m轴与转子磁链矢量重合,则:
为保证m轴与转子磁链矢量始终重合,还应满足:

按转子磁链定向同步旋转坐标系mt中状态方程:
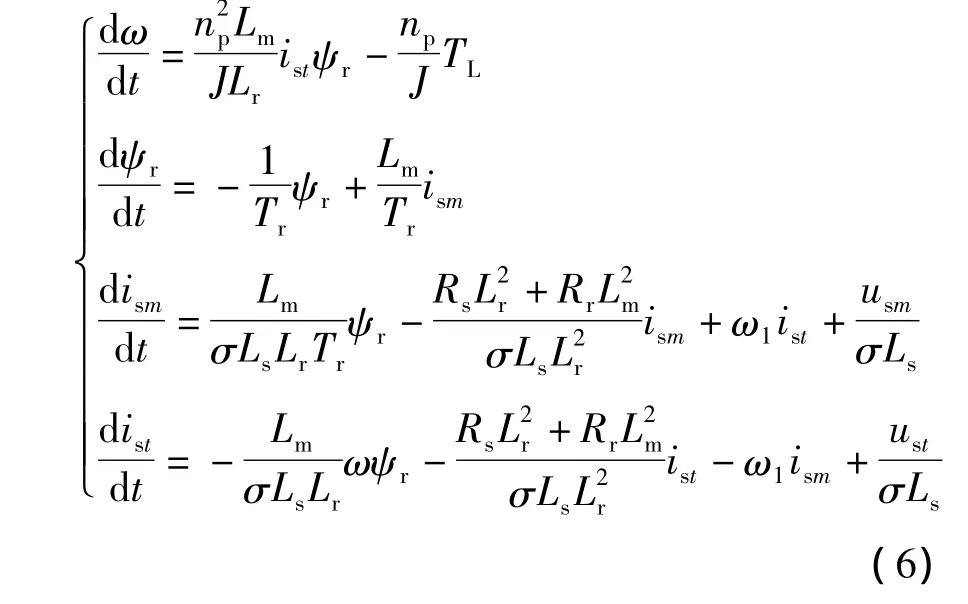
由式(6)可以得出:
ω——电机转速;
ω1——同步转速;
ωs——转差;
ψ——磁链;
np——极对数;
下标 r、s——转子、定子。
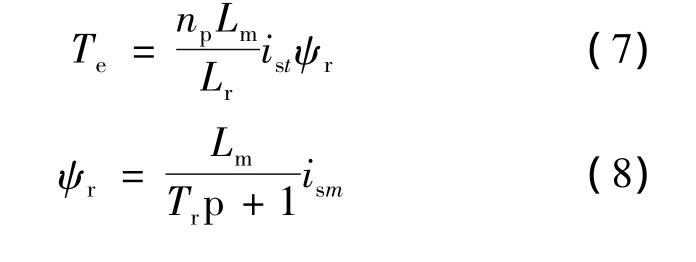
经过坐标变换和按转子磁链定向,三相异步电动机变成一台由ism和ist为输入,ω为输出的直流电动机。m绕组相当于直流电动机的励磁绕组,ism相当于励磁电流,t绕组相当于电枢绕组,ist相当于电枢电流。
1.2 无速度传感器
电机车工作环境复杂,机械振动、电磁干扰等会影响转速编码器的正常工作,给系统带来不稳定因素,因此采用无速度传感器进行转速估算。
根据式(6),将 ω用 ω1-ωs代替,又由于Tr=Lr/Rr,可以得出:

化简得到:

式(12)表明,可以根据定、转子电感,励磁电流ism,转矩电流ist,转子磁链 ψr和转矩电流 ist的微分计算得到同步转速ω1。再结合式(10)可得到估算转速:

磁链角可以由同步转速得到:

无速度传感器结构图如图1所示,矢量控制系统总体结构如图2所示。
2 电机车调速系统组成
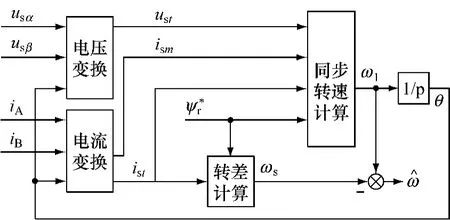
图1 转速估算结构图
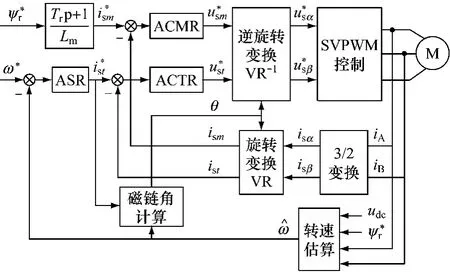
图2 采用无速度传感器的转速闭环磁链开环矢量控制系统结构图
电机车的整个调速系统由司机室操作台、控制系统、电机驱动模块、异步电动机等组成,调速系统总体结构如图3所示。操作台上包括起动/停止、加速/减速控制手柄,加速/减速控制手柄同时提供刹车、前进、后退等控制信号,控制系统包括主控制器及各辅助模块。
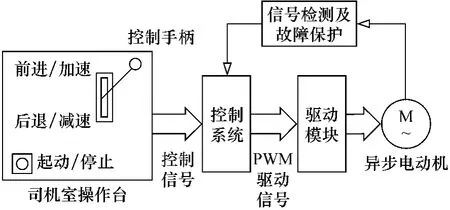
图3 硬件总体结构图
控制系统软件主要由主程序和四个功能模块组成。主程序主要完成系统初始化,四个功能模块分别为脉宽调制(Pulse Width Modulation,PWM)模块、故障处理模块、CAN通信模块、运行状态检测模块。软件流程图如图4所示。
图4中,“初始化”完成系统硬件配置、资源分配和部分共用变量声明;“运行状态检测”进行电机转速估算,电流、电压检测;“空间矢量脉宽调制(System Vector Pulse Width Modulation,SVPWM)控制”完成矢量控制的核心功能,包括坐标变换、转速闭环控制、磁链角计算及PWM信号生成等;“CAN通信”根据用户PC机设定,向用户提供所需数据。
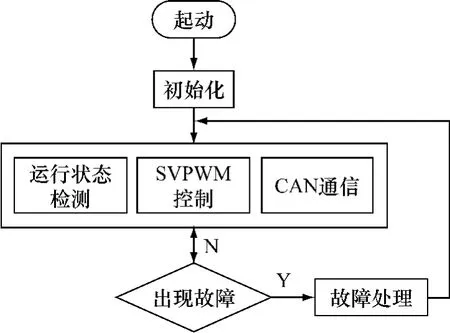
图4 控制系统结构框图
架线式电机车由交流电网整流提供直流电源,为保证供电不稳定情况下系统能够稳定运行,在直流母线上并联电容器和蓄电池。安装一个80线转速编码器对电机运行状态进行检测,以保证机车在上下坡、打滑、过载等情况下的安全和稳定。系统采用Microchip dsPIC30f6010A作为核心控制芯片,调速系统总体结构如图5所示。
3 试验
为验证方案的可行性,在3 kW异步电动机上进行试验,电机铭牌参数如下:fN=50 Hz、nN=1 400 r/min、UN=380 V、IN=6.9 A。
图6所示分别为给定转速在 ±800 r/min、±1 400 r/min范围内变化的实际转速与估算转速,由图可以看出,该系统所采用的无速度传感器能够准确跟随实际转速。
图7所示为上位机软件通过CAN通信得到电机起动和突加、突减负载时电机的运行情况。由图7可以看出,电机起动时由于转速较低,电流迅速上升到限幅,到达给定转速之后电流下降,突加、突减负载时,电机能够快速响应,电流能够很好地跟随负载的变化而变化。
另外,在22 kW电机上进行了试验,电机参数如下:fN=40 Hz、nN=590 r/min、UN=380 V、IN=49 A、Te=356 N·m。在堵转情况下,电机可以输出2倍额定的转矩,可以满足矿山电机车的需要。
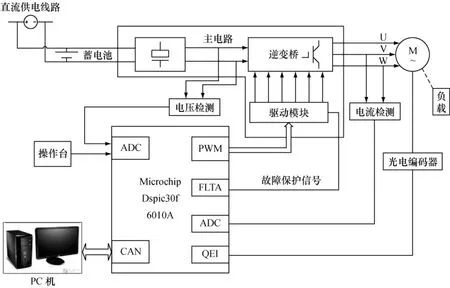
图5 调速系统总体结构图
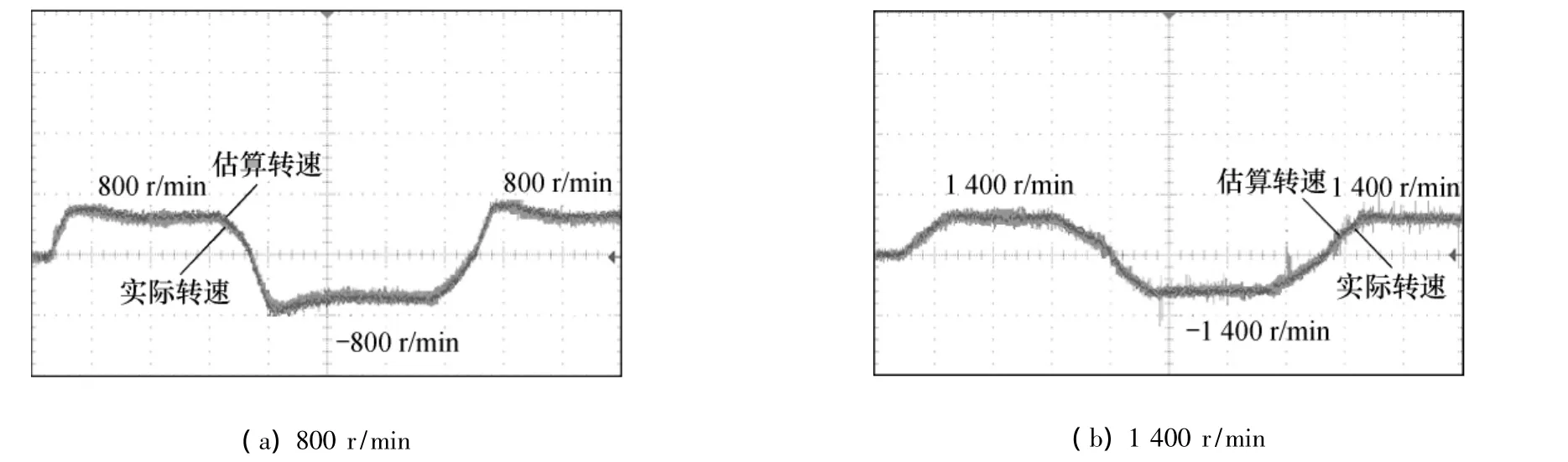
图6 不同给定转速下的实际转速和估算转速
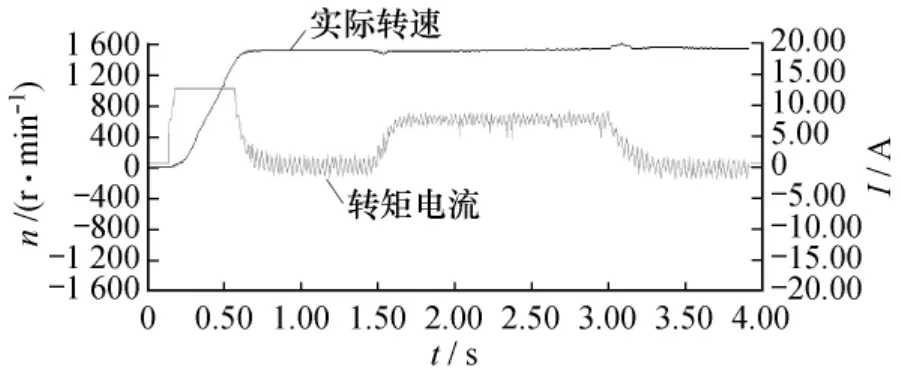
图7 电机起动和突加、突减负载时电机的转速、电流波形
4 结语
采用无速度传感器和矢量控制算法,设计了一套直流架线式矿用电机车变频调速系统。在3 kW和22 kW电机上进行试验,无速度传感器估算准确,系统结构简单,鲁棒性好,动态响应快,可以大转矩、大电流工作,能够适应矿用电机车特殊的工作环境。
[1]王淑芳,杨智勇,席巍.矿用电机车调速控制系统研究[J].金属矿山,2009(8):101-105.
[2]张毅,阮毅,张毅鸣,等.基于dsPIC6010的牵引型变频器控制系统设计[J].电机与控制应用,2009(2):3-6.
[3]顾军,许青春.直接转矩控制在矿用电机车交流传动上的应用[J].煤矿机械,2006(8):140-143.
[4]阮毅,陈维钧.运动控制系统[M].北京:清华大学出版社,2006.
[5]Lee Z G,Jeong S K,You S S.Robust control against rotor resistance variation for speed sensorless induction motors[C]∥IEEE International Conference on Electric Machines and Drives,2005,15(1):444-449.
[6]杨霞.变频调速系统在矿用蓄电池电机车的应用研究[J].煤矿机电,2008(3):13-15.
[7]姜孝华,金济,王湘,等.无速度传感器控制矿用电力机车牵引变频调速器[J].电力电子技术,2006(3):83-85.